



【機器人仿真案例】基于RecurDyn Durability預測機器人夾爪疲勞壽命 
核心技術n構建可還原夾爪實際結構與運動狀態(tài)的動力學模型n通過與實際模型對標,完成接觸、摩擦、材料屬性及輸入載荷的相關性驗證流程n基于MFBD仿真結果開展應力導向型疲勞耐久性分析n選用適配的缺口系數(shù),保障耐久性分析可靠性n基于應力頻次分析制定結構設計方案,對薄弱部位進行結構強化使用工具 RecurDyn/Professional RecurDyn
1456
杭州擬創(chuàng)(RecurDyn原廠) ??? 1月前
Comsol的爪型針高頻電磁消融腫瘤仿真分析 
此次借助comsol的生物模塊和電熱模塊進行爪型消融針仿真:消融過程的動圖俯視圖展示:
爪型針電勢分布爪型針焦耳能量分布
消融區(qū)域等效球徑隨時間變化
有興趣的可以加我,歡迎交流。
3363 81 2
琳泓comsol ??? 5年前
基于CONVERGE軟件的爪式泵仿真計算 

本課程介紹了如何使用CONVERGE軟件快速的對雙級爪式泵進行仿真建模,同時還可以考慮轉子與外殼之間的微小間隙,學會了爪式泵的建模也可以使用該軟件對其他旋轉泵進行仿真建模。
91 2
快燃仿真 ??? 4年前
并聯(lián)機械手爪運動學分析 
通過表2.7的D-H參數(shù),在MATLAB中編寫的程序如下圖2.8所示: 圖2.8 Link函數(shù)程序 采摘機器手爪的運動學仿真模型由該程序代碼在MATLAB軟件中運行得出,其模型如下圖2.9所示: 圖2.9 機械手運動學模型 2.4.5 運動模型驗證 上文已將完成了對采摘機器手爪運動學理論模型的建立。
2286
余俊煒 ??? 2年前
電動夾爪如何解決傳統(tǒng)氣動夾爪四大痛點?
痛點三:產線換型效率低下,柔性生產受阻 在多品種、小批量生產場景中,氣動夾爪的換型需人工調整夾具位置、重新布置傳感器并調試氣壓參數(shù),耗時約10分鐘,頻繁停機嚴重影響設備利用率。米思米電動夾爪內置可編程控制系統(tǒng),通過預設不同工件的夾持參數(shù),操作人員只需調用對應程序即可一鍵完成切換,全過程耗時縮短至2分鐘,效率提升80%。
1215
米思米misumi ??? 1年前
純電動三檔變速器設計與性能仿真研究 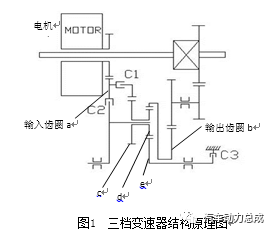
圖8為NEDC工況電池SOC消耗對比曲線,仿真結果顯示采用三檔變速器的純電動汽車能耗節(jié)省顯著,節(jié)省了7%的電能消耗。 由圖9為百公里加速仿真試驗結果,起始時刻為3s,仿真結果表明三檔百公里加速能夠滿足整車設計要求。
2372
EDC電驅未來 ??? 3年前
電動夾爪的特點:米思米引領工業(yè)自動化的新篇章 
三、操作簡便米思米電動夾爪結構緊湊、操作簡便。用戶可以通過編程控制實現(xiàn)自動化裝配、搬運和上下料等任務,無需復雜的操作步驟。此外,夾爪的智能化設計使得其操作更加直觀和便捷,降低了使用門檻。 四、可靠性高米思米電動夾爪采用高強度材料制造,具有較高的耐磨性和抗沖擊性。這使得夾爪能夠在惡劣的工作環(huán)境下保持穩(wěn)定的工作性能,確保生產線的連續(xù)穩(wěn)定運行。
1639
米思米misumi ??? 1年前
電動夾爪:米思米高效能、低成本的新一代抓取利器 
無論是抓取輕小物品還是重型工件,米思米電動夾爪都能展現(xiàn)出卓越的性能。在汽車零部件生產線、電子制造、食品加工等領域,米思米電動夾爪已經(jīng)得到了廣泛應用。它不僅能夠提高生產效率,降低生產成本,還能保證產品質量和穩(wěn)定性。因此,越來越多的企業(yè)開始選擇米思米電動夾爪作為他們的自動化抓取解決方案。 三、總結與展望米思米電動夾爪以其高效能、低成本的特點,成為了工業(yè)自動化領域的一顆璀璨明珠。
2192
米思米misumi ??? 1年前
米思米官網(wǎng)電動夾爪購買攻略 
而米思米電動夾爪則可以通過預設參數(shù),實現(xiàn)一鍵切換程序,大大簡化了切換過程,提高了生產效率。此外,電動夾爪還具備更高的穩(wěn)定性。由于采用伺服電機控制夾持力和行程,輸出穩(wěn)定可靠,避免了因氣源不穩(wěn)定導致的夾持力不穩(wěn)、工件掉件等問題。米思米電動夾爪系列包括平行型、旋轉型和吸取型三種類型,每種類型都有其獨特的應用場景和優(yōu)勢。
1076
米思米misumi ??? 1年前
PKPM-CAE建筑仿真模塊正式發(fā)布,三大核心應用場景助力復雜結構設計 
PKPM-CAE建筑仿真三大典型應用場景 PKPM-CAE在建筑工程仿真模擬領域的典型應用場景主要包括三類:①復雜節(jié)點靜力/極限強度分析,可以解決結構設計中的復雜節(jié)點分析問題。②高層結構大震彈塑性分析,基于通用有限元內核,數(shù)據(jù)開放,彈塑性分析功能專業(yè),能夠滿足復雜工程彈塑性分析需求。③大跨結構屈曲/后屈曲穩(wěn)定性分析,可用于網(wǎng)架網(wǎng)殼等結構的非線性穩(wěn)定分析。
3773
李斌 ??? 3年前
米思米經(jīng)濟型電動夾爪:高效、精準、經(jīng)濟的物流新選擇 
在分揀環(huán)節(jié),電動夾爪能夠以每分鐘數(shù)百件的速度準確抓取、分類各類大小不一的包裹,顯著提升了分揀效率。在搬運環(huán)節(jié),電動夾爪能夠輕松應對從脆弱的電子產品到笨重家具等各種類型貨物的搬運,保證了貨物的安全無損。三、經(jīng)濟性與實用性的完美結合米思米經(jīng)濟型電動夾爪不僅技術先進,而且價格實惠,具有很高的性價比。相比傳統(tǒng)的氣動夾爪,米思米電動夾爪無需氣源,降低了能源消耗和運營成本。
966
米思米misumi ??? 1年前
基于Rsoft的三芯光子晶體光纖數(shù)值仿真 
仿真時,光源的Type選擇為Fiber Mode,然后分別對1、2、3的纖芯路徑的能量進行監(jiān)測。圖1 三芯光子晶體光纖建模圖如圖2,為三芯PCF的縱向功率分布圖,光源從纖芯1輸入波長為1550nm的光,通過仿真可以看出纖芯1的能量在向纖芯2、纖芯3耦合。因為結構對稱可以從數(shù)值仿真結果中得出纖芯2、纖芯3耦合的能量相同。當給PCF一個彎曲量時纖芯2、纖芯3的能量曲線就不會重合。
2918 1
320科技工作室 ??? 3年前
天洑軟件將參展第三十六屆中國仿真大會 
“攜手仿真智能,共創(chuàng)未來世界”,第三十六屆中國仿真大會將于2024年10月18日-20日在江蘇揚州召開。本次會議由中國仿真學會主辦,中國航空工業(yè)集團公司沈陽飛機設計研究所、航空科技揚州實驗室等單位承辦,天洑軟件作為協(xié)辦單位受邀參展并發(fā)表主題報告。
2300
天洑軟件 ??? 1年前
米思米新品:電動夾爪,省時省心,重塑生產流程! 
如果你對這款產品感興趣,想要了解更多信息或購買使用,只需在米思米官網(wǎng)搜索“電動夾爪”,即可跳轉到產品頁面。商品共有平行型、旋轉型、吸取型三個系列,無需氣源,行程、速度、夾持力可自由設定,實時反饋當前夾取狀態(tài)。相信這款優(yōu)質的產品一定會為你的生產流程帶來全新的改變!瀏覽更多工業(yè)產品知識,訪問工業(yè)品一站式采購平臺-米思米官網(wǎng)https://www.misumi.com.cn/
845
米思米misumi ??? 1年前
第三屆中國仿真技術產業(yè)高峰論壇5月18-19日將在成都召開 
第三屆中國仿真技術產業(yè)高峰論壇( The 3nd China Simulation Technology Industry Forum)將于 2023年5月18日(星期三)—19日(星期五)在四川省成都市溫江區(qū)隆重召開。本屆論壇主題為:“推動仿真關鍵技術解決,實現(xiàn)高水平科技自立自強”。
2024
Bjhq2021 ??? 3年前
5月18-19日|第三屆中國仿真技術產業(yè)高峰論壇盛大舉行 
2.會議地點:四川省成都市溫江區(qū)成都費爾頓大酒店(成都市溫江區(qū)文化路111 號)三、會議主題及活動安排推動仿真關鍵技術解決,實現(xiàn)高水平科技自立自強1.院士論壇2.特邀主旨報告3.專業(yè)主題交流論壇(1)工業(yè)仿真軟件研發(fā)、應用與開源共享分論壇(2)汽車交通仿真分論壇(3)虛擬樣機與數(shù)字孿生分論壇(4)工業(yè)智能與數(shù)字工程分論壇(5)基于模型的系統(tǒng)工程與仿真技術分論壇
1876
Bjhq2021 ??? 3年前
第三屆中國仿真技術產業(yè)高峰論壇暨成都(溫江)數(shù)字化創(chuàng)新峰會成功舉辦 
中國工業(yè)合作協(xié)會聯(lián)合中國仿真技術產業(yè)高峰論壇參會嘉賓,共同發(fā)出如下倡議:一、瞄準世界仿真技術前沿,凝心聚力,心無旁騖,開展仿真關鍵技術研發(fā),實現(xiàn)高水平自立自強。二、激活創(chuàng)新動力,探索產業(yè)發(fā)展模式,集中優(yōu)勢資源,打造國際一流的仿真產品、仿真服務及仿真平臺。三、用仿真科技賦能傳統(tǒng)產業(yè),降本增效,創(chuàng)新發(fā)展,助力重點產業(yè)數(shù)字化轉型,提升國際競爭力。
2273
Bjhq2021 ??? 3年前
三自由度機械臂運動學分析+仿真 
求關節(jié)角 對式子兩邊連續(xù)乘以A1-A2的逆矩陣,可得 讓上述公式中第一行第三列對應相等,第二行第三列對應相等可得: 3機器人模型建立 所設計的機器人由多個連桿機構組成,其關節(jié)類型包括旋轉關節(jié)和移動關節(jié)兩種。利用Matlab中機器人仿真工具箱Robotics Tool中Link和SerialLink兩個函數(shù)可建立機器人模型[] 。
3997
余俊煒 ??? 2年前
1+8+8 第三屆中國仿真技術產業(yè)高峰論壇暨成都(溫江)數(shù)字化創(chuàng)新峰會圓滿舉辦 
第三屆中國仿真技術產業(yè)高峰論壇暨成都(溫江)數(shù)字化創(chuàng)新峰會的成功召開,是中國仿真技術領域的一件大事,為加強仿真技術基礎研究,推動仿真技術產學研用融合,助力“卡脖子”關鍵技術解決貢獻了積極力量。
2805
Bjhq2021 ??? 2年前
基于SolidWorks的自動裝卸機械結構設計 
2.3 機械手手爪的設計 機械爪設計要滿足相應的原則,搬運式手爪實現(xiàn)物體的搬 運和夾取,為多類型手持裝置。加工式手爪為機械手附加設備, 設置銑刀、焊槍等工具,能夠實現(xiàn)作業(yè)加工。 機械手手腕為操作最末端,和手爪連接。手爪的空間動作和 作業(yè)與手臂配合,滿足實際作業(yè)需求,具備一定自由度,并且小 巧輕盈、結構緊湊。
4677 5
太極元氣 ??? 2年前
20條/頁 
 169
169 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
