



Matlab做有限元分析并與ANSYS對比 附Matlab有限元結(jié)構(gòu)動力學(xué)分析與工程應(yīng)用徐斌下載 
下載地址:Matlab有限元結(jié)構(gòu)動力學(xué)分析與工程應(yīng)用徐斌
3122 2 1
筆筆 ??? 4年前
【JY】基于Matlab的(單)多自由度動力學(xué)代碼分享 
已適用于結(jié)構(gòu)風(fēng)工程、地震工程、沖擊動力學(xué)等。2、改代碼可從迭代方式進行實時對相關(guān)矩陣重新組裝,實現(xiàn)非線性分析,如對K做實時更新,可得到位移型滯回的非線性分析結(jié)果,對M做實時更新可得到結(jié)構(gòu)的動態(tài)質(zhì)量隨時間或者上一步響應(yīng)的變化。3、由于該代碼架構(gòu)比較簡單,適合于小體量的結(jié)構(gòu)矩陣,若需要更大體量的結(jié)構(gòu)計算,仍需要引入Jydyn函數(shù)庫。
4291 12 2
建源之光 - 減隔震 ??? 2年前
某行走機構(gòu)多體動力學(xué)與結(jié)構(gòu)強度聯(lián)合仿真分析 
通過MotionView建立該產(chǎn)品行走機構(gòu)的多體動力學(xué)模型,通過多體動力學(xué)仿真分析,獲得了關(guān)鍵部件的工作載荷歷程,確定了部件的最大載荷。通過在HyperMesh中建立關(guān)鍵部件的有限元模型,加載MotionView輸出的載荷信息,通過OptiStruct計算分析,找到了結(jié)構(gòu)的主要受力位置,分析結(jié)果與結(jié)構(gòu)的實際破壞完全吻合。
3174
CAE仿真學(xué)習(xí)菌 ??? 2年前
網(wǎng)絡(luò)課程系列 | 結(jié)構(gòu)動力學(xué)測試與分析 
結(jié)構(gòu)動力學(xué)測試與分析系列課程通過由易到難、逐步進階的設(shè)計,旨在幫助用戶縱覽結(jié)構(gòu)動力學(xué)應(yīng)用的常用工具,了解和掌握結(jié)構(gòu)動力學(xué)測試與分析的工作目的、基本理論、主要過程和分析方法,以便聽眾在今后工作中針對研究對象選擇適合方法,助力結(jié)構(gòu)優(yōu)化、共振抑制。
3131
HBK聲學(xué)與振動 ??? 4年前
結(jié)構(gòu)動力學(xué),你了解多少? 附結(jié)構(gòu)動力學(xué)電子書籍下載 
運動方程的建立、求解和分析,是結(jié)構(gòu)動力學(xué)理論研究的基本內(nèi)容。 ANSYS Mechanical 針對結(jié)構(gòu)動力學(xué)問題提供了多種分析類型,使用戶能夠確定結(jié)構(gòu)對于動載荷的響應(yīng),包括模態(tài)分析、諧響應(yīng)分析、響應(yīng)譜分析、隨機振動分析等。 模態(tài)分析用于確定結(jié)構(gòu)的振動特性,即固有頻率和振型,它們是承受動態(tài)載荷結(jié)構(gòu)設(shè)計中的重要參數(shù)。
2418 1
小小酥1 ??? 3年前
matlab調(diào)姿機構(gòu)動力學(xué)?
具體要求 調(diào)姿機構(gòu)如圖 1所示,已根據(jù)結(jié)構(gòu)進行簡化,推導(dǎo)出基于拉格朗日方程的動力學(xué)工程,麻煩檢查一下結(jié)構(gòu)簡化是否合理,動力學(xué)方程推導(dǎo)是否正確,然后將機器人關(guān)節(jié)誤差(摩擦力、外部擾動、關(guān)節(jié)間隙、關(guān)節(jié)減速器誤差)融入動力學(xué)模型形成新的動力學(xué)方程,編寫相關(guān)程序,務(wù)必進行校核。
2434 5
用戶_50729 ??? 1年前
ABAQUS 熱結(jié)構(gòu)耦合顯示動力學(xué)三維正交切削分析案例 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、與切削工藝相關(guān)的工程師你會得到什么:1、掌握三維模型的繪制2、掌握熱結(jié)構(gòu)耦合顯示動力學(xué)分析相關(guān)的材料參數(shù)設(shè)置3、理解動力學(xué)分析步的建立4、學(xué)習(xí)切削相關(guān)的相互關(guān)系的設(shè)置5、了解顯示動力學(xué)網(wǎng)格的劃分6、學(xué)習(xí)結(jié)果后處理的查看與對比案例介紹:所使用軟件為ABAQUS2018
2659 1
天空紀年xh ??? 1年前
一文了解多體動力學(xué)仿真分析方法和應(yīng)用領(lǐng)域 
Ansys解決方案針對上述多體動力學(xué)在各個行業(yè)內(nèi)的一些應(yīng)用,Ansys提供了完整的解決方案,包括:疲勞仿真、模態(tài)仿真、動力學(xué)特性、線性有限元分析、多體動力學(xué)分析等,并且具有強大的無網(wǎng)格仿真技術(shù),能夠高效并精確的求解多體運動與結(jié)構(gòu)變形的耦合問題,能夠?qū)ο到y(tǒng)的運動性能、結(jié)構(gòu)、振動、疲勞等進行分析。1、動力傳動系統(tǒng)的動力學(xué)分析動力傳動系統(tǒng)結(jié)構(gòu)包括齒輪、軸承、轉(zhuǎn)軸、齒輪箱等。
3818
Ansys中國 ??? 4年前
ABAQUS 熱結(jié)構(gòu)耦合顯示動力學(xué)二維正交切削分析案例 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、與切削工藝相關(guān)的工程師你會得到什么:1、掌握二維模型的繪制2、掌握熱結(jié)構(gòu)耦合顯示動力學(xué)分析相關(guān)的材料參數(shù)設(shè)置3、理解動力學(xué)分析步的建立4、學(xué)習(xí)切削相關(guān)的相互關(guān)系的設(shè)置5、了解顯示動力學(xué)網(wǎng)格的劃分6、學(xué)習(xí)結(jié)果后處理的查看與對比案例介紹:所使用軟件為ABAQUS2018.
2402 1 1
天空紀年xh ??? 1年前
結(jié)構(gòu)動力學(xué)測試分析軟件-漢航NTS.LAB 
TSA 傳遞路徑分析(空氣傳遞路徑分析和結(jié)構(gòu)傳遞路徑分析)TPA 車輛通過噪聲測試PBN 開放的平臺,NTS.LAB不僅支持漢航自身硬件,亦可支持NI、VTI等硬件進行實時數(shù)據(jù)采集和模態(tài)測試分析等應(yīng)用 NTS.LAB可運行在臺式機或筆記本計算機上,專為現(xiàn)場、實驗室的結(jié)構(gòu)動力學(xué)測試分析應(yīng)用而設(shè)計。
2217
漢航 ??? 3年前
ANSYS workbench 小塊熱結(jié)構(gòu)耦合瞬態(tài)動力學(xué)分析 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、對有限元分析感興趣的工程師你會得到什么:1、學(xué)習(xí)小塊移動的三維模型處理2、學(xué)習(xí)小塊移動非線性接觸相關(guān)的接觸設(shè)置3、學(xué)習(xí)非線性熱結(jié)構(gòu)耦合動力學(xué)分析步的建立4、學(xué)習(xí)小塊移動熱結(jié)構(gòu)耦合動力學(xué)分析的載荷施加案例介紹:所使用軟件為ANSYS workbench2020r2.
1736
天空紀年xh ??? 10月前
【汽車書籍抽獎】 CAE/CAD仿真、底盤結(jié)構(gòu)、電池?zé)峁芾怼⑾到y(tǒng)動力學(xué)等實體書籍,一鍵參加~ 
CAE技術(shù)在汽車行業(yè)的應(yīng)用從最初的線彈性部件分析到汽車結(jié)構(gòu)中大量的非線性問題分析,到現(xiàn)在汽車疲勞壽命分析、NVH分析、碰撞模擬等,CAE分析幾乎涵蓋了汽車性能的所有方面。小到螺栓預(yù)緊力分析,大到整車碰撞模擬和整車NVH(噪聲、振動和聲振粗糙度)分析,CAE分析都發(fā)揮了無可替代的優(yōu)勢和作用。CAE分析范圍覆蓋了結(jié)構(gòu)、流體力學(xué)、多體動力學(xué)、被動安全、工藝、整機合整車性能等方方面面。
3294 1 2
技術(shù)鄰公告 ??? 3年前
Matlab近場動力學(xué)(PD)原代碼:涵蓋BB/OSB、熱力耦合、復(fù)合材料及PD-FEM耦合 
一套深度集成、功能豐富的 Matlab 近場動力學(xué)(Peridynamics)原代碼合集。代碼不僅復(fù)現(xiàn)了PD領(lǐng)域的經(jīng)典文獻算例(彈性問題驗證),更進一步拓展到了熱力學(xué)、復(fù)合材料及跨尺度耦合算法。適合作為研究生的科研底座、畢業(yè)設(shè)計參考或PD算法的深度進階學(xué)習(xí)資料。 基礎(chǔ)理論實現(xiàn): 鍵基 PD (BBPD):最經(jīng)典的鍵基模型,適用于脆性材料破壞分析。
1422
Zyax ??? 1月前
ABAQUS 熱結(jié)構(gòu)耦合顯示動力學(xué)二維旋轉(zhuǎn)切削分析案例 
本案例適合哪些人學(xué)習(xí):1、學(xué)習(xí)型仿真工程師2、理工科院校學(xué)生3、與切削工藝相關(guān)的工程師你會得到什么:1、掌握二維模型的繪制2、掌握熱結(jié)構(gòu)耦合顯示動力學(xué)分析相關(guān)的材料參數(shù)設(shè)置3、理解動力學(xué)分析步的建立4、學(xué)習(xí)切削相關(guān)的相互關(guān)系的設(shè)置5、了解顯示動力學(xué)網(wǎng)格的劃分6、學(xué)習(xí)結(jié)果后處理的查看與對比案例介紹:所使用軟件為ABAQUS2018
1867
天空紀年xh ??? 10月前
BCC點陣結(jié)構(gòu)梁單元Abaqus壓縮仿真模擬-顯示動力學(xué)質(zhì)量縮放 
本文通過abaqus顯示動力學(xué)的方法對BCC結(jié)構(gòu)進行壓縮仿真模擬,同時為減小計算量,采用梁單元模擬點陣結(jié)構(gòu),壓頭設(shè)置為剛性面,添加質(zhì)量縮放,加快運算速度,為點陣結(jié)構(gòu)壓縮模擬提供一種便捷方法。1. 建立BCC點陣模型,以單胞尺寸5X5X5為例。a.首先建立立方體實體,然后對實體進行處理,得到點陣單胞點陣結(jié)構(gòu)。
4609 25 7
工科小師妹 ??? 1年前
ANSYS workbench摩擦盤熱結(jié)構(gòu)耦合動力學(xué) 
案例介紹了ANSYS workbench 摩擦盤熱結(jié)構(gòu)耦合動力學(xué)分析。本案例完整得提供了分析相關(guān)所有分析文件。 ?
4380 5 6
天空紀年xh ??? 1年前
Adams&Workbench&Matlab四連桿機構(gòu)運動學(xué)分析 
創(chuàng)建完成后Adams動力學(xué)模型如圖2所示。
2809
擺渡人張 ??? 2年前
邀請函|漢航公司高端結(jié)構(gòu)動力學(xué)測試分析系統(tǒng)產(chǎn)品交流會 
漢航(北京)科技有限公司 由國際結(jié)構(gòu)動力學(xué)界一批極富理論功底和工程經(jīng)驗的資深力學(xué)、聲學(xué)工程師創(chuàng)建成立。 漢航公司目標:研發(fā)世界一流的結(jié)構(gòu)動力學(xué)測試分析工業(yè)軟件及儀器,創(chuàng)建世界一流企業(yè)。 積極探索新技術(shù)、踐行工程創(chuàng)新、為社會、國家、世界的進步發(fā)展做貢獻。
2387
漢航 ??? 1年前
橋梁工程結(jié)構(gòu)動力學(xué)國家重點實驗室的計算利器---高速計算設(shè)備硬件配置推薦 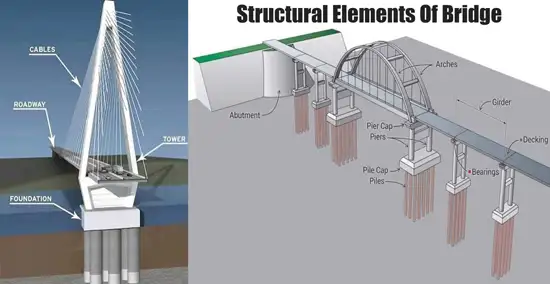
這些研究有助于提前發(fā)現(xiàn)橋梁結(jié)構(gòu)的問題并采取相應(yīng)的維修和保養(yǎng)措施。在橋梁工程結(jié)構(gòu)動力學(xué)研究中,常用的軟件工具包括但不限于:SAP2000:用于橋梁結(jié)構(gòu)的有限元分析和動力學(xué)模擬。ANSYS:用于橋梁結(jié)構(gòu)的有限元分析和動力學(xué)模擬。ABAQUS:用于橋梁結(jié)構(gòu)的有限元分析和動力學(xué)模擬。MIDAS Civil:用于橋梁結(jié)構(gòu)的有限元分析和動力學(xué)模擬。
2766
UltraLAB ??? 2年前
動力學(xué)分析方法探秘:顯式動力學(xué)與隱式動力學(xué)對比
在工程領(lǐng)域的結(jié)構(gòu)分析中,動力學(xué)分析是一項關(guān)鍵任務(wù),用于模擬結(jié)構(gòu)在外部加載下的動態(tài)響應(yīng)。顯式動力學(xué)和隱式動力學(xué)是兩種常用的數(shù)值模擬方法,各自在特定情境下發(fā)揮著重要作用。在本文中,我們將深入探討這兩種動力學(xué)分析方法的概念以及它們分別適用的問題。顯式動力學(xué):顯式動力學(xué)特別適用于模擬高速動態(tài)加載、爆炸、碰撞等事件中的結(jié)構(gòu)行為。
3665 3 2
CAE知識手札 ??? 2年前
20條/頁 
 229
229 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
