



270 基于matlab的模糊自適應(yīng)PID控制 
基于matlab的模糊自適應(yīng)PID控制,具有10頁(yè)報(bào)告。傳統(tǒng)PID在對(duì)象變化時(shí),控制器的參數(shù)難以自動(dòng)調(diào)整。將模糊控制與PID控制結(jié)合,利用模糊推理方法實(shí)現(xiàn)對(duì)PID參數(shù)的在線自整定。使控制器具有較好的自適應(yīng)性。使用MATLAB對(duì)系統(tǒng)進(jìn)行仿真,結(jié)果表明系統(tǒng)的動(dòng)態(tài)性能得到了提高。程序已調(diào)通,可直接運(yùn)行。
2236
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
pid自動(dòng)模糊控制的例子
import time as turl = 'http://192.168.150.1:8081/get'from pid import *dt = 0.01time = 0tinm_l = []output_l = []baoshijie = car() # 生產(chǎn)一輛車pid_controller = PIDController(0.45, 0.02, 0.001) # 一個(gè)pid控制器
2488 1
蘑菇寫手 ??? 2年前
西門子PLC控制系統(tǒng)和繼電器控制系統(tǒng)的聯(lián)系與區(qū)別
二、 PLC 控制系統(tǒng)和繼電器控制系統(tǒng)的差別:1、繼電器控制系統(tǒng)適用于簡(jiǎn)單一些的邏輯控制,而 PLC 可以實(shí)現(xiàn)更復(fù)雜的邏輯控制。2、是實(shí)現(xiàn)控制邏輯所用的硬件不同:繼電器控制系統(tǒng),其邏輯功能由傳統(tǒng)的繼電器來(lái)完成的,比如控制時(shí)間,就有相應(yīng)的時(shí)間繼電器。
2982
電氣自動(dòng)化資料庫(kù) ??? 4年前
氣體質(zhì)量流量控制器是否支持手動(dòng)控制? 
氣體質(zhì)量流量控制器(Mass Flow Controller, MFC)作為核心執(zhí)行元件,廣泛應(yīng)用于半導(dǎo)體、光伏、分析儀器、實(shí)驗(yàn)室研發(fā)等場(chǎng)景,很多用戶在選型或使用過程中常會(huì)提出一個(gè)關(guān)鍵問題:氣體質(zhì)量流量控制器是否支持手動(dòng)控制?
845
曾澤明-前端 ??? 25天前
基于ANSYS的水冷電機(jī)控制器散熱仿真分析 
以5.5 k W控制器為例,對(duì)其主要發(fā)熱器件電容及IGBT(Insulated Gate Bipolar Transistor,絕緣柵極型晶體管)進(jìn)行熱仿真分析。1 控制器的前處理1.1 控制器結(jié)構(gòu)降階處理對(duì)5.5 k W控制器進(jìn)行3D建模,顯示控制器有1215個(gè)部件,控制器模型如圖1所示。若全部仿真會(huì)使模擬計(jì)算量和時(shí)間增加,一般需要進(jìn)行模型降階處理[5]。
4109 4 2
寶怡 ??? 2年前
智能測(cè)量放大器對(duì)比PLC控制器 
這些操作程序的創(chuàng)建和修改需要訓(xùn)練有素的專家,因?yàn)榭删幊踢壿?em>控制器的調(diào)整和補(bǔ)充非常耗時(shí),沒有專門的編程專家是無(wú)法實(shí)現(xiàn)的。這同樣適用于小型緊湊型控制器,如果沒有必要的技術(shù)知識(shí),這些控制器是不可能運(yùn)行的。 由于其預(yù)定的結(jié)構(gòu),PLC很快達(dá)到處理數(shù)據(jù)量的極限。因此,對(duì)于具有大數(shù)據(jù)量和測(cè)量信號(hào)精確曲線的測(cè)量和控制任務(wù),PLC將無(wú)法勝任。
4761 1
HBK測(cè)試與測(cè)量 ??? 3年前
模糊邏輯 |介紹 
模糊符主要有三種類型: 單例模糊處理器 Gaussian fuzzifier (高斯模糊器) 梯形或三角形模糊器 什么是模糊控制? 這是一種將類似人類的思維體現(xiàn)在控制系統(tǒng)中的技術(shù)。 它可能不是為了給出準(zhǔn)確的推理而設(shè)計(jì)的,但它是為了給出可接受的推理。
2661 1
仿真資料吧 ??? 1年前
西門子PLC控制變頻器:實(shí)現(xiàn)3段速控制電路原理分析 
程序給大家截圖了: 原理分析:一變頻合閘1閉合總電源空開QF1,PLC控制電源QF3,以及變頻器輸入接觸器控制電源QF2,控制器PLC是講輸出輸出的電壓信號(hào)(0-10V) 或電流信號(hào)(4-20mA)轉(zhuǎn)換成中間變量(0-32000)。
2503
電氣自動(dòng)化資料庫(kù) ??? 4年前
一文讀懂自動(dòng)駕駛域控制器 
域控制器的核心是一個(gè)高性能的計(jì)算機(jī),該計(jì)算機(jī)集成了多個(gè)處理器、存儲(chǔ)器和通信接口等組件,可以實(shí)現(xiàn)對(duì)車輛系統(tǒng)的快速響應(yīng)和高效控制。同時(shí),域控制器還集成了多種傳感器和控制器,如相機(jī)、激光雷達(dá)、雷達(dá)等設(shè)備,可以實(shí)現(xiàn)車輛的感知和控制功能。
4236 3 2
駕駛哥 ??? 3年前
行業(yè)標(biāo)準(zhǔn)IN/IN數(shù)字控制接口的雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器-SS8844T 
該芯片采用PWM控制方式,工作電壓范圍:8V~40V;內(nèi)置3.3V基準(zhǔn)電壓;連續(xù)輸出電流2.5A;峰值電可達(dá)4.0A;導(dǎo)通阻抗0.35Ω;具備四個(gè)獨(dú)立控制的1/2H橋啟動(dòng)器,可驅(qū)動(dòng)多種負(fù)載,如兩個(gè)DC電機(jī)、一個(gè)步進(jìn)電機(jī)或四個(gè)螺線管等。每個(gè)通道的輸出驅(qū)動(dòng)器通道采用N通道功率MOSFET組成,確保高效穩(wěn)定的驅(qū)動(dòng)性能。輸入可以用PWM控制,例如,控制DC電機(jī)的轉(zhuǎn)速。
1098
如果我年少有為 ??? 2月前
氣體質(zhì)量流量控制器與質(zhì)量流量傳感器是否是一體化設(shè)計(jì)? 
布瑯軻鍶特-氣體質(zhì)量流量控制器:https://www.bronkhorst-china.com/ 從工作原理來(lái)看,氣體質(zhì)量流量控制器本質(zhì)上是質(zhì)量流量傳感器與比例控制閥的有機(jī)結(jié)合體,傳感器負(fù)責(zé)實(shí)時(shí)監(jiān)測(cè)氣體質(zhì)量流量,并將數(shù)據(jù)傳輸至微處理器;微處理器將實(shí)測(cè)值與設(shè)定值進(jìn)行比對(duì),隨即驅(qū)動(dòng)控制閥進(jìn)行動(dòng)態(tài)調(diào)節(jié),以消除偏差,這一過程遵循著嚴(yán)格的物理閉環(huán)邏輯。
656
曾澤明-前端 ??? 12天前
純電動(dòng)汽車整車控制器原理及功能解析 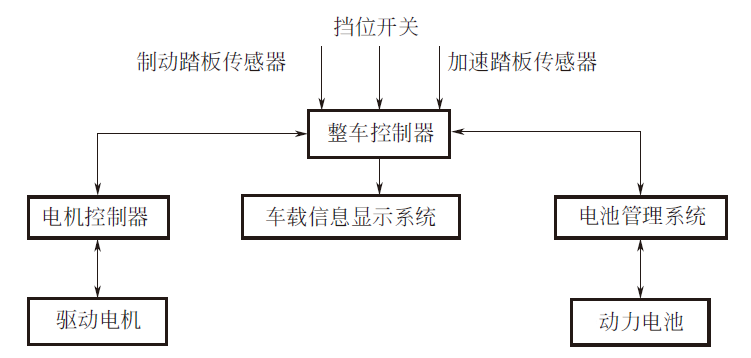
某公司開發(fā)的純電動(dòng)汽車整車控制器組成原理圖 (1)微控制器模塊 微控制器模塊是整車控制器的核心,綜合考慮純電動(dòng)汽車整車控制器的功能及其運(yùn)行的外界環(huán)境,微控制器模塊應(yīng)該具有高速的數(shù)據(jù)處理性能、豐富的硬件接口、低成本和可靠性高的特點(diǎn)。
2752 2
汽車公社 ??? 3年前
MBSE產(chǎn)品模型架構(gòu)應(yīng)用:基于模型驅(qū)動(dòng)架構(gòu)概念的自主水下航行器控制器的MBSE應(yīng)用(下) 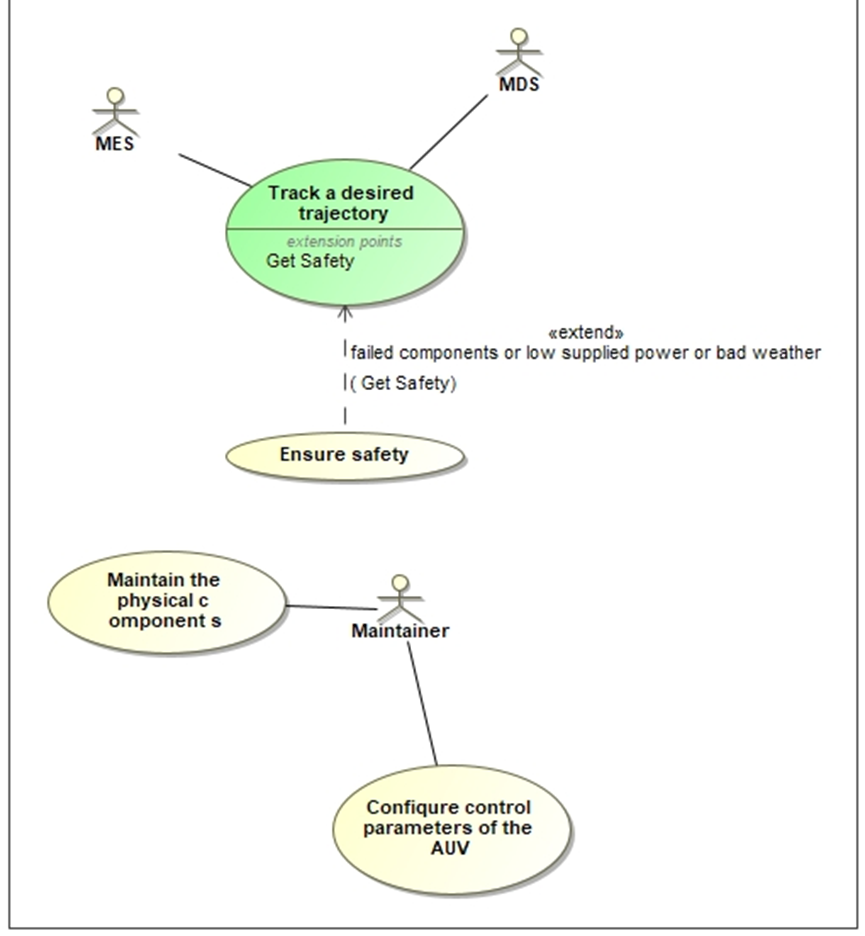
這種模式可以定制并在新的AUV控制應(yīng)用中重復(fù)使用(表2)。然后,通過中間C++代碼的往返工程將設(shè)計(jì)的PIM轉(zhuǎn)換為PSM,以形成具有合適微控制器的AUV控制器。在所提出的模型的基礎(chǔ)上,利用ATMEGA U2和STM32-Cortex-M4微控制器實(shí)現(xiàn)并評(píng)估了在自由面上運(yùn)行的微型魚雷形AUV的平面軌跡跟蹤控制器。最后,討論了MBSE/MDA方法在這種AUV控制應(yīng)用中的優(yōu)缺點(diǎn)(表5)。
2164 1 1
一起學(xué)MBSE ??? 2年前
仿生撲翼飛行器的控制系統(tǒng) 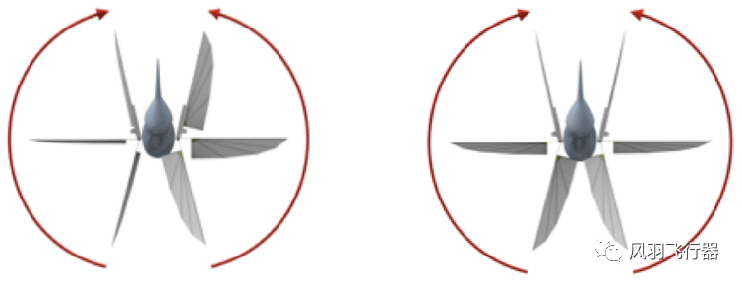
撲翼飛行器大部分需額外增加控制系統(tǒng)進(jìn)行機(jī)翼驅(qū)動(dòng)和控制。 對(duì)于固定翼和旋翼的飛行器,最簡(jiǎn)單的控制方法就是多通道遙控器與接收機(jī)的開源控制。 但由于撲翼飛行器本身易受擾動(dòng),當(dāng)飛行環(huán)境的變化對(duì)機(jī)身產(chǎn)生額外的擾動(dòng)時(shí),飛行器本身不能及時(shí)自穩(wěn),只能依靠操縱手來(lái)手動(dòng)修正飛行姿態(tài),該方法對(duì)操作經(jīng)驗(yàn)提出了很高的要求。
5065 7 4
我愛飛機(jī) ??? 2年前
新型整車控制器關(guān)鍵技術(shù)分析 
用于整車控制器與其他域控制器的通信,如圖3。而對(duì)于域內(nèi)的智能執(zhí)行器和傳感器,使用其他低成本解決方案,如CANFD、CAN、LIN。圖3 整車控制器使用以太網(wǎng)與其他域控制器通信當(dāng)然,在整車控制器上增加車載以太網(wǎng)面臨著巨大的改變:相對(duì)于CAN通信更龐大的軟件協(xié)議棧;更大的控制器功耗;更大的靜態(tài)電流,這些都需要在系統(tǒng)設(shè)計(jì)時(shí)被考慮。
3020 2 1
汽車公社 ??? 3年前
新型整車控制器關(guān)鍵技術(shù)分析 
軟件定義汽車的出現(xiàn),要求整車控制器具備高計(jì)算性能、程序可更新、客戶可安裝軟件等特性,在整車控制器上微控制器便不能再獨(dú)自勝任。 目前主流的解決方案是引入微處理器(MPU)作為微控制器的補(bǔ)充。組成雙核心高性能整車控制器。這些微處理器與智能手機(jī)或PC中使用的微處理器非常相似,具有強(qiáng)大的計(jì)算及數(shù)據(jù)處理能力和高核心頻率。
2408
RRose ??? 4年前
氣體質(zhì)量流量控制器的響應(yīng)時(shí)間如何? 
在介紹氣體質(zhì)量流量控制器的響應(yīng)時(shí)間之前,我們首先要了解什么是氣體質(zhì)量流量控制器,它是一種通過測(cè)量和控制氣體流動(dòng)的儀器,能夠?qū)崟r(shí)監(jiān)測(cè)和調(diào)節(jié)氣體的流量,與傳統(tǒng)的壓力控制器相比,氣體質(zhì)量流量控制器更加準(zhǔn)確和穩(wěn)定,能夠滿足工業(yè)生產(chǎn)過程中對(duì)流量控制的高要求。
1328
曾澤明-前端 ??? 3月前
特斯拉的三個(gè)區(qū)域控制器(Zonal)配置 
三個(gè)區(qū)域控制器我感興趣的地方還在于,特斯拉對(duì)所有三個(gè)控制器的連接器進(jìn)行了重新定義,采用自制連接器的方式實(shí)現(xiàn)了降本。實(shí)際上我們看到在BMS、逆變器連接器、充電控制器這些自制的控制器,在連接器上都是這么干的。▲圖2.
2667
芝能汽車 ??? 4年前
新能源電動(dòng)汽車電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制器結(jié)構(gòu)與功能 
一、電動(dòng)汽車驅(qū)動(dòng)電機(jī)控制器概述電機(jī)控制器,控制動(dòng)力電源與驅(qū)動(dòng)電機(jī)之間能量傳輸?shù)难b置,由控制信號(hào)接口電路、驅(qū)動(dòng)電機(jī)控制電路和驅(qū)動(dòng)電路組成。
2838
年輕態(tài) ??? 4年前
MBSE產(chǎn)品模型架構(gòu)應(yīng)用:基于模型驅(qū)動(dòng)架構(gòu)概念的自主水下航行器控制器的MBSE應(yīng)用(上) 
傳統(tǒng)的控制方法通常用于實(shí)現(xiàn)復(fù)雜系統(tǒng),以使其對(duì)控制器更有效,它們也被用于構(gòu)建AUV控制器。下面介紹一些應(yīng)用于AUV的傳統(tǒng)控制技術(shù)。
2565
一起學(xué)MBSE ??? 2年前
20條/頁(yè) 
 344
344 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
