



基于多工況加權(quán)柔度響應(yīng)的汽車(chē)控制臂拓?fù)鋬?yōu)化 
概述汽車(chē)控制臂(Control Arm)是懸架系統(tǒng)的關(guān)鍵部件,其核心作用是將車(chē)輪與車(chē)架連接,并在車(chē)輛行駛過(guò)程中承受并傳遞來(lái)自車(chē)輪的多方向力和力矩。拓?fù)鋬?yōu)化的目標(biāo)是在給定的設(shè)計(jì)空間、材料和工況下,找到材料的最優(yōu)分布,使結(jié)構(gòu)在滿足多種性能要求(如剛度、強(qiáng)度、頻率)的同時(shí),實(shí)現(xiàn)輕量化。
628
320科技工作室 ??? 6天前
多通道DSP控制陣列高度的技術(shù) 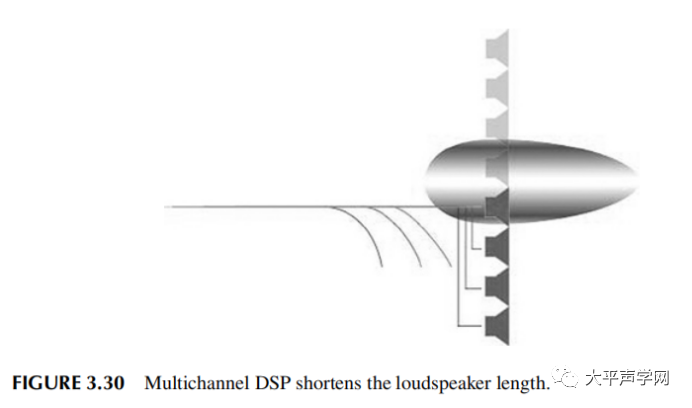
【基本概念】 1 多通道DSP控制陣列高度的技術(shù)(Multichannel DSP Control of Array Height) 它是一種在垂直揚(yáng)聲器陣列中使用多個(gè)數(shù)字信號(hào)處理器(DSP)通道來(lái)控制聲音波束的方向性和高度的方法。這里的陣列高度是指聲學(xué)波束的高度,而不是實(shí)際揚(yáng)聲器驅(qū)動(dòng)單元的物理高度。
1995 1
聲學(xué)仿真初學(xué)者 ??? 2年前
氣體質(zhì)量流量控制器是否可以測(cè)量多個(gè)通道的流量? 
系統(tǒng)層面的多通道解決方案:模塊化與集成化 當(dāng)涉及到真正的物理多通道——即需要同時(shí)控制多種不同氣體的混合或配比時(shí),布瑯軻鍶特同樣提供了成熟的解決方案,在化學(xué)氣相沉積、燃料電池測(cè)試或復(fù)雜的分析儀器中,往往需要同時(shí)精確控制4路、8路甚至更多路的氣體流量。
710
曾澤明-前端 ??? 19天前
基于optistruct汽車(chē)控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化案例 
本例以汽車(chē)控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化為例,講述在optistruct中是如何進(jìn)行多目標(biāo)拓?fù)鋬?yōu)化,非公式,目的就是快速得到傳遞路徑,與傳統(tǒng)輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學(xué)也可以聯(lián)系我,有相關(guān)的資料購(gòu)買(mǎi)后對(duì)于模型中不懂的地方都可以問(wèn)
2226 1 9
lz1234 ??? 3年前
基于optistruct汽車(chē)控制臂多工況拓?fù)鋬?yōu)化 

汽車(chē)控制臂三種工況下的多目標(biāo)拓?fù)鋬?yōu)化為例,講述在optistruct中是如何進(jìn)行多目標(biāo)拓?fù)鋬?yōu)化,從而滿足特定要求下汽車(chē)控制臂的概念設(shè)計(jì)。對(duì)于單目標(biāo)拓?fù)鋬?yōu)化你會(huì)發(fā)現(xiàn)每一種工況下拓?fù)鋬?yōu)化的結(jié)果不一樣,多目標(biāo)拓?fù)鋬?yōu)化則綜合考慮多種工況下的目標(biāo)得到一個(gè)綜合結(jié)果。 對(duì)于多目標(biāo)優(yōu)化常用的手段:1、將目標(biāo)轉(zhuǎn)化為約束條件;2、對(duì)多目標(biāo)采用加權(quán)的方法得到一個(gè)綜合目標(biāo)。
1073 9
CAE行路人 ??? 6年前
行業(yè)標(biāo)準(zhǔn)IN/IN數(shù)字控制接口的雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器-SS8844T 
雙通道H橋驅(qū)動(dòng)器(用于電機(jī)控制)結(jié)構(gòu)組成:其核心是兩個(gè)獨(dú)立的H橋電路。每個(gè)H橋由四個(gè)開(kāi)關(guān)元件(通常是MOSFET)構(gòu)成,分為上、下橋臂。電機(jī)連接在兩個(gè)橋臂的中點(diǎn)之間。雙通道設(shè)計(jì)意味著可以獨(dú)立控制兩個(gè)直流電機(jī)。工作原理:正轉(zhuǎn)/反轉(zhuǎn):通過(guò)控制對(duì)角線上的一對(duì)開(kāi)關(guān)管導(dǎo)通(如左上+右下),另一對(duì)關(guān)閉,來(lái)改變流過(guò)電機(jī)的電流方向,從而實(shí)現(xiàn)電機(jī)的正反轉(zhuǎn)。
1098
如果我年少有為 ??? 2月前
Hyperworks控制臂網(wǎng)格劃分和縱向/側(cè)向靜剛度、縱向和側(cè)向雙軸臺(tái)架疲勞、靜剛度+臺(tái)架疲勞多目標(biāo)拓?fù)鋬?yōu)化、非線性Buckling Force仿真分析實(shí)例視頻教程 
本課程基于瑪莎拉蒂前懸架控制臂,詳細(xì)介紹了控制的網(wǎng)格劃分方法以及縱向和側(cè)向靜剛度的仿真分析方法、縱向和側(cè)向雙軸組合疲勞的仿真分析方法、縱向側(cè)向剛度和臺(tái)架疲勞的多目標(biāo)拓?fù)鋬?yōu)化的仿真方法、縱向和側(cè)向非線性Buckling_Force的求解方法。
2682 1
辰巳午未 ??? 2年前
雙通道H橋驅(qū)動(dòng)并且每個(gè)H橋可提供4.0A電流的電流控制電機(jī)驅(qū)動(dòng)器 
雙通道H橋驅(qū)動(dòng)通過(guò)兩個(gè)獨(dú)立的H橋電路分別控制兩個(gè)電機(jī),實(shí)現(xiàn)同步正反轉(zhuǎn)、獨(dú)立調(diào)速等功能。其核心原理如下:結(jié)構(gòu)組成:每個(gè)通道包含四個(gè)開(kāi)關(guān)元件(如MOSFET或IGBT),分為上下橋臂。電機(jī)連接在橋臂中間,兩端分別接至左右橋臂。工作模式:正轉(zhuǎn)?:同時(shí)導(dǎo)通上半橋的兩個(gè)開(kāi)關(guān)管,電流從正電源經(jīng)電機(jī)流向負(fù)電源;下半橋開(kāi)關(guān)管保持關(guān)閉。
2974
如果我年少有為 ??? 8月前
【技術(shù)帖】基于架構(gòu)開(kāi)發(fā)的汽車(chē)懸架控制臂優(yōu)化設(shè)計(jì) 
文章實(shí)采汽車(chē)在試車(chē)場(chǎng)的路譜信號(hào),基于以上方法,根據(jù)后下控制臂的受載特征,將實(shí)采路譜的輪心處載荷分解到后下控制臂,得到簡(jiǎn)化的多級(jí)載荷塊,開(kāi)發(fā)了后下控制臂的單通道臺(tái)架試驗(yàn),進(jìn)行快速驗(yàn)證,零件通過(guò)單通道快速驗(yàn)證后,進(jìn)一步搭載后橋系統(tǒng)多通道臺(tái)架試驗(yàn)進(jìn)行系統(tǒng)級(jí)的驗(yàn)證,在兩側(cè)輪心加載。零件級(jí)臺(tái)架試驗(yàn),如圖14 所示。系統(tǒng)級(jí)臺(tái)架試驗(yàn),如圖15 所示。在要求的試驗(yàn)循環(huán)里均無(wú)失效發(fā)生,驗(yàn)證了優(yōu)化方案滿足耐久性能。
3158
肥皂寶寶 ??? 4年前
增強(qiáng)現(xiàn)實(shí)場(chǎng)景下基于穩(wěn)態(tài)視覺(jué)誘發(fā)電位的機(jī)械臂控制系統(tǒng) 
然而,大部分重度失能患者無(wú)法通過(guò)傳統(tǒng)的人機(jī)交互方式(語(yǔ)音、鍵盤(pán)等)控制康復(fù)機(jī)器人,因此人機(jī)交互能力的擴(kuò)展對(duì)于發(fā)揮康復(fù)機(jī)器人系統(tǒng)的作用至關(guān)重要。 腦機(jī)接口(Brain-Computer Interface,BCI)是一種不依賴(lài)人體外周神經(jīng)和肌肉的,在大腦與外界環(huán)境間建立直接信息與控制通道的技術(shù),實(shí)現(xiàn)大腦與外部設(shè)備間的直接交互。
2576 1
機(jī)械設(shè)計(jì)師 ??? 4年前
適合12V系統(tǒng)產(chǎn)品的國(guó)產(chǎn)16V/1A兩通道H橋驅(qū)動(dòng)芯片-SS6849H 
雙通道H橋驅(qū)動(dòng)芯片通過(guò)獨(dú)立控制兩個(gè)H橋電路實(shí)現(xiàn)電機(jī)的獨(dú)立驅(qū)動(dòng)或同步控制。以下是其核心工作原理:驅(qū)動(dòng)方式:每個(gè)通道包含四個(gè)開(kāi)關(guān)元件(如MOSFET或IGBT),分為上下橋臂。通過(guò)交替導(dǎo)通上下橋臂的開(kāi)關(guān)元件控制電流方向,實(shí)現(xiàn)電機(jī)的正反轉(zhuǎn)、制動(dòng)及調(diào)速。電機(jī)控制模式:?正轉(zhuǎn)?:同時(shí)導(dǎo)通上半橋的兩個(gè)開(kāi)關(guān)元件,電流從正電源經(jīng)電機(jī)流向負(fù)電源。
2178
如果我年少有為 ??? 7月前
每個(gè)H橋可提供輸出電流1.6A的雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器-SS8812T 
雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器是一種電子電路,用于獨(dú)立控制兩個(gè)直流電機(jī)的方向、速度和制動(dòng)。它基于H橋拓?fù)浣Y(jié)構(gòu),每個(gè)通道包含四個(gè)開(kāi)關(guān)元件(如MOSFET或晶體管),形成一個(gè)“H”形電路,電機(jī)作為負(fù)載連接在橋臂上。?雙通道設(shè)計(jì)允許同時(shí)控制兩個(gè)電機(jī),每個(gè)通道獨(dú)立工作。例如,一個(gè)通道控制電機(jī)1,另一個(gè)控制電機(jī)2,通過(guò)各自的PWM信號(hào)和方向控制實(shí)現(xiàn)多軸運(yùn)動(dòng)(如機(jī)器人輪子驅(qū)動(dòng))。?
2443
如果我年少有為 ??? 5月前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計(jì)算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
五連桿后懸除了運(yùn)動(dòng)副建模以外,也可以采用多約束裝配的建模方法,如下圖所示。使用多約束裝配控制轉(zhuǎn)向節(jié)安裝點(diǎn)與副車(chē)架安裝點(diǎn)之間的距離,最終控制轉(zhuǎn)向節(jié)的最終姿態(tài)。多約束裝配不僅適用于五連桿后懸,也適用于其它各類(lèi)型的前后懸架。多約束裝配相比運(yùn)動(dòng)副建模求解速度快,建模簡(jiǎn)單等優(yōu)點(diǎn)。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計(jì)算 ??? 12月前
Adams比利時(shí)路面控制臂動(dòng)態(tài)載荷分解&Hyperworks控制臂疲勞壽命仿真分析實(shí)例視頻教程 
本課程分為兩節(jié):第一節(jié)介紹了利用adams軟件,以24通道輪心力作為輸入,來(lái)分解比利時(shí)路面上控制臂的動(dòng)態(tài)載荷的詳細(xì)方法過(guò)程;第二節(jié)介紹了利用hyperworks軟件,基于第一節(jié)提取的動(dòng)態(tài)載荷,來(lái)仿真分析比利時(shí)路面上控制臂的疲勞壽命。
1620 1
辰巳午未 ??? 2年前
多旋翼無(wú)人機(jī)的振動(dòng)實(shí)驗(yàn)和仿真分析 
圖7 優(yōu)化前后仿真結(jié)構(gòu)比較5 結(jié)束語(yǔ)實(shí)驗(yàn)結(jié)果表明:(1)如果只需要尋找無(wú)人機(jī)的振動(dòng)模態(tài)規(guī)律,使用加速度傳感器即可;(2)對(duì)于機(jī)臂,z軸方向振動(dòng)更應(yīng)該得到關(guān)注,其振動(dòng)影響最大。(3)通過(guò)改變機(jī)臂形狀和增加機(jī)臂之間的耦合,可以有效降低懸臂梁結(jié)構(gòu)機(jī)臂帶來(lái)的振動(dòng)影響。文章來(lái)源工業(yè)控制計(jì)算機(jī). 2023,36(10)
5848 7 2
無(wú)人機(jī)圈 ??? 2年前
傳統(tǒng)測(cè)試設(shè)備的局限與協(xié)作機(jī)械臂的破局 
9.智能控制軟件:作為系統(tǒng)大腦,統(tǒng)一調(diào)度機(jī)械臂運(yùn)動(dòng)、控制末端工具、觸發(fā)測(cè)試儀器并分析數(shù)據(jù)。 三、 協(xié)作機(jī)械臂在測(cè)試領(lǐng)域的典型應(yīng)用場(chǎng)景基于上述核心單元,協(xié)作機(jī)械臂可以勝任以下關(guān)鍵測(cè)試任務(wù):1. PCBA/主板功能測(cè)試協(xié)作機(jī)械臂攜帶多路測(cè)試頂針,精準(zhǔn)移動(dòng)到PCBA的各個(gè)測(cè)試點(diǎn),實(shí)現(xiàn)飛針測(cè)試的功能自動(dòng)化。結(jié)合力控反饋,能保證接觸力的一致性與可靠性,避免損傷焊點(diǎn)。
2819 1 1
德基西瓜 ??? 7月前
為什么說(shuō)AR可視化讓機(jī)械臂實(shí)驗(yàn)更高效? 
與硬性的關(guān)節(jié)機(jī)械臂相比,柔性機(jī)械臂更難操作,尤其是用手動(dòng)來(lái)塑形可能會(huì)產(chǎn)生誤差。通常,培訓(xùn)柔性機(jī)械臂的時(shí)候需要先手動(dòng)將它塑造成任務(wù)所需的形狀,而在沒(méi)有指導(dǎo)的情況下,實(shí)驗(yàn)員很難將機(jī)器人配置成準(zhǔn)確的形狀。科研人員表示:多自由度機(jī)器人在設(shè)計(jì)、軌跡規(guī)劃和方向控制等方面都存在難度,而這也是許多圍繞機(jī)器人設(shè)計(jì)的實(shí)驗(yàn)中普遍面臨的問(wèn)題。
3904 2 1
機(jī)械設(shè)計(jì)師 ??? 4年前
庫(kù)卡、ABB等12家機(jī)械臂3D打印解決方案 
這可以通過(guò)大型機(jī)器實(shí)現(xiàn),尤其是那些使用 FDM 的機(jī)器,同時(shí)機(jī)械臂也為用戶提供了許多優(yōu)勢(shì)。機(jī)器人手臂手不僅可以憑借其長(zhǎng)距離臂進(jìn)行大規(guī)模打印,而且由于其多軸以及制造部件通常不需要支撐結(jié)構(gòu)這一事實(shí),它還可以實(shí)現(xiàn)更大的自由度。盡管制造機(jī)械臂的制造商屈指可數(shù),但它們已被 3D 打印制造商用于聚合物和金屬增材制造解決方案。
2979
南極熊3D打印 ??? 3年前
淺談太空“機(jī)械臂” 
人類(lèi)第一種空間機(jī)械臂就是由加拿大Spar公司設(shè)計(jì)制造。1981年,該公司和美國(guó)宇航局聯(lián)合研制了4套供航天飛機(jī)使用的空間機(jī)械臂,被稱(chēng)為加拿大臂。加拿大臂的重量為410.5公斤,長(zhǎng)約15米,由6個(gè)控制關(guān)節(jié)組成。6個(gè)自由度的加拿大臂安裝在航天飛機(jī)左舷的縱梁上,采用航天員艙內(nèi)遙控操作方式,用于展開(kāi)和回收有效載荷,以及協(xié)助航天員進(jìn)行艙外活動(dòng)。
2120
機(jī)械設(shè)計(jì)師 ??? 4年前
【虹科案例】虹科數(shù)字化儀在多通道、多功能測(cè)試和測(cè)量系統(tǒng)中的應(yīng)用 
本文將研究這些產(chǎn)品如何在多通道/多功能測(cè)試系統(tǒng)中用于多種測(cè)試應(yīng)用。
2367 1
虹科-馬穎 ??? 3年前
20條/頁(yè) 
 56
56 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
