



基于optistruct汽車控制臂三種工況、加上1階模態(tài)下的多目標拓撲優(yōu)化案例 
本例以汽車控制臂三種工況、加上1階模態(tài)下的多目標拓撲優(yōu)化為例,講述在optistruct中是如何進行多目標拓撲優(yōu)化,非公式,目的就是快速得到傳遞路徑,與傳統(tǒng)輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學也可以聯(lián)系我,有相關的資料購買后對于模型中不懂的地方都可以問
2227 1 9
lz1234 ??? 3年前
自動駕駛多模態(tài)融合感知詳解(研究現(xiàn)狀及挑戰(zhàn)) 
多源信息權衡現(xiàn)有的方法缺乏對來自多個維度和來源的信息的有效利用。他們中的大多數(shù)都專注于前視圖中的單幀多模態(tài)數(shù)據。結果,其他有意義的信息沒有得到充分利用,例如語義、空間和場景上下文信息。在自動駕駛場景中,許多具有顯式語義信息的下游任務可能會極大地提高目標檢測任務的性能。
2814
駕駛哥 ??? 3年前
自動駕駛行業(yè)觀察 | 自動駕駛多模態(tài)融合感知詳解(研究現(xiàn)狀及挑戰(zhàn)) 
多源信息權衡現(xiàn)有的方法缺乏對來自多個維度和來源的信息的有效利用。他們中的大多數(shù)都專注于前視圖中的單幀多模態(tài)數(shù)據。結果,其他有意義的信息沒有得到充分利用,例如語義、空間和場景上下文信息。在自動駕駛場景中,許多具有顯式語義信息的下游任務可能會極大地提高目標檢測任務的性能。例如,車道檢測可以直觀地為檢測車道之間的車輛提供額外幫助,語義分割結果可以提高目標檢測性能。
2538
駕駛哥 ??? 3年前
汽車多模態(tài)交互測試:智能交互的深度驗證 
2、多模態(tài)融合一致性測試場景:同時觸發(fā)語音指令(如 “打開空調”)與手勢動作(指向空調出風口),驗證設備是否輸出一致的控制信號,避免指令沖突(沖突率需<0.5%)。評估方法:通過日志分析系統(tǒng)記錄多模態(tài)指令的處理時序,計算指令融合成功率(目標值≥98%)。汽車多模態(tài)交互整合了語音、手勢、觸控、眼神等多種交互方式,打破單一交互模式的局限,為用戶提供更自然、便捷的交互體驗。
2564
德基西瓜 ??? 11月前
多特征融合的多目標跟蹤網絡 
以上基于聚類的無監(jiān)督方法可以獲得一定的場景泛化能力來應對光線變化,但僅使用二維圖像對復雜場景分割的精度依舊有限且難以進行場景感知,亦存在較多局限性。 針對室內場景目標多種多樣,各目標之間差異較大,比如有靠椅、有凳子等,傳統(tǒng)圖像算法難以完整的分割出目標,且難以獲得類別標簽等更多的信息。
2538
駕駛哥 ??? 4年前
深度學習|基于MobileNet的多目標跟蹤深度學習算法 
關鍵詞深度學習 多目標跟蹤 目標檢測 YOLOv3 deep-SORT MobileNet0 引言多目標跟蹤是計算機視覺領域的研究熱點, 可應用于交通監(jiān)測、安防等多個領域, 具有一定的應用價值和挑戰(zhàn)性[1]. 檢測方式可以分為檢測跟蹤和無檢測跟蹤兩類, 前者需要檢測目標后再進行跟蹤; 后者需要在第1幀手動初始化目標, 然后進行跟蹤.
2442 1
龍騰AI技術 ??? 3年前
基于深度學習的多目標跟蹤算法原理 
將神經網絡學習到的目標的表觀特征引入到多目標跟蹤算法中,是提升多目標跟蹤算法效果的最簡單直接的辦法。其具體的操作方法有以下幾種:利用在圖像識別或行人重識別任務訓練得到的特征提取網絡,直接替換現(xiàn)有的多目標跟蹤算法框架中的表觀特征提取模塊;采用深度神經網絡學習光流運動特征,將光流網絡引入到算法中計算目標之間的運動相關性等。而通過深度學習提升多目標跟蹤算法更加直接的方法是學習檢測之間的特征相似性。
3206
駕駛哥 ??? 4年前
214基于matlab的交互多模算法(IMM)機動目標跟蹤算法 
基于matlab的交互多模算法(IMM)機動目標跟蹤算法,完整的15頁文檔論文。根據二維空間內目標作勻速直線運動和勻速圓周運動的特點,在建立目標運動模型和觀測模型的基礎上采用基于交互多模算法(IMM)的卡爾曼濾波器對機動目標進行跟蹤。仿真結果表明,該算法不僅能夠對勻速直線運動和勻速圓周運動的目標進行跟蹤,而且在運動模型發(fā)生變化時,濾波誤差也比較小。
2121
matlab應用與學習 ??? 2年前
hypermesh多目標優(yōu)化要注意那些問題?
hypermesh多目標優(yōu)化要注意那些問題?
2749 5 1
lz1234 ??? 1年前
AI行業(yè)七大趨勢:合成數(shù)據、多模態(tài)AI崛起 
多模態(tài) AI 崛起多模態(tài) AI 正在打破單一感官的藩籬,使用一個通用 AI 模型科技將多種類型的數(shù)據所蘊含的語義信息概念化并作出預測。在 2021 年初,OpenAI 發(fā)布了可以根據文本信息生成圖像的 AI 模型 DALL-E。
2257
王者歸來123 ??? 3年前
hypermesh多目標加權,怎么加權?
hypermesh多目標加權,怎么加權?
2231 2
lz1234 ??? 1年前
多目標優(yōu)化時量綱歸一化問題?
我有兩個目標函數(shù)分別是力均勻性和形面精度,需將這兩個目標函數(shù)轉換成一個目標函數(shù)f。在歸一化過程中,f1max,f1min,這些界限值是怎么選取的?是根據實際的需求,設定為固定值;還是說f1max f1min是要隨著迭代過程進行也進行變化?
2653 1 3
劉嫣然 ??? 3年前
AMESim電控單體泵高速電磁閥多目標優(yōu)化分析 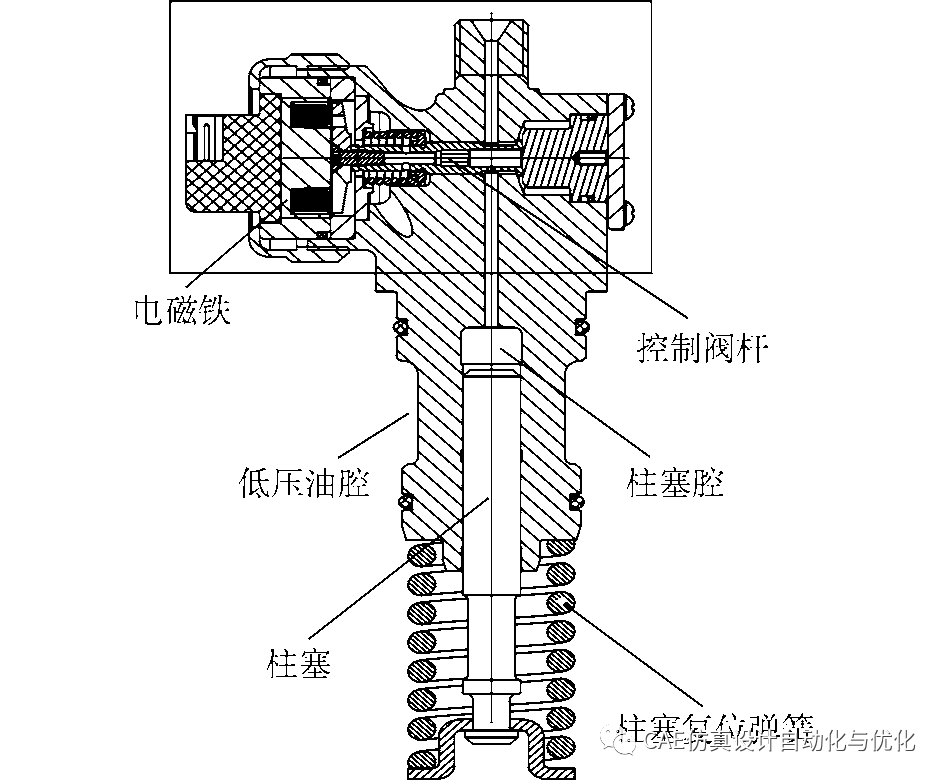
應用多目標多學科優(yōu)化平臺modeFRONTIER,采用NSGA-II遺傳算法,以電控單體泵高速電磁閥開啟、關閉響應延遲時間作為目標建立多目標優(yōu)化模型。優(yōu)化結果顯示:關閉延遲時間減小了6% ,開啟延遲時間減小了17. 7% ,噴油壓力峰值增大0. 62MPa,有利于進一步提高循環(huán)噴油量控制的精確程度。
2989 1
技術哥 ??? 3年前
Isight--響應面分析+單目標或多目標優(yōu)化--操作流程 

本節(jié)課主要講解一下如何用Isight讀取已經處理好的數(shù)據進行響應面近似模型建立以及用NLPQL 算法為例進行講解單目標優(yōu)化問題。多目標優(yōu)化問題類似處理。
143 4
東邪不邪 ??? 4年前
多目標遺傳算法實際案例——運輸問題的matlab目標函數(shù)代碼詳解 
該視頻介紹了一個具體運輸問題的多目標遺傳算法的應用,詳細介紹了matlab目標函數(shù)編碼
8
活潑可男_matlab教學 ??? 1年前
賦能智慧隧道施工:工程車輛多模態(tài)數(shù)據采集系統(tǒng) 
近期,在和眾多該類客戶的溝通過程中,我們觀察到了一些被頻繁提到的客戶需求和場景痛點,針對于此,以隧道運輸設備——MSV膠輪車為例,本文為該類客戶量身定制了一套高性能多模態(tài)數(shù)據采集方案。本文將從客戶的實際痛點出發(fā),詳細拆解如何在無GPS信號、環(huán)境惡劣的隧道場景中,實現(xiàn)高精度、多傳感器的數(shù)據融合與采集。
2102
康謀keymotek ??? 5月前
SerDes設計中高速傳輸線的人工智能驅動多參數(shù)多目標優(yōu)化流程(7月29日直播) 
7月29日,Ansys官方研討會『SerDes設計中高速傳輸線的人工智能驅動多參數(shù)多目標優(yōu)化流程』為您分享如何借助Ansys RaptorAI,通過人工智能技術實現(xiàn)SerDes(高速傳輸線)的多參數(shù)、多目標協(xié)同優(yōu)化,加速設計流程、提升設計質量。
2577
技術鄰公告 ??? 9月前
230基于matlab的布谷鳥(COA)多目標優(yōu)化算法 
基于matlab的布谷鳥(COA)多目標優(yōu)化算法,以 滿意度、成本、時間、質量為目標的多目標優(yōu)化求解代碼。程序已調通,可直接運行。
2094
matlab應用與學習 ??? 2年前
205基于matlab的關于多目標跟蹤的的濾波程序 
基于matlab的關于多目標跟蹤的的濾波程序,包括采用聯(lián)合概率數(shù)據互聯(lián)(JPDA)算法實現(xiàn)兩個個勻速運動目標的點跡與航跡的關聯(lián),輸出兩個目標跟蹤的觀測位置、估計位置以及估計誤差。程序已調通,可直接運行。
2198
matlab應用與學習 ??? 2年前
基于LS-DYNA的鉚接工藝多目標優(yōu)化仿真 附ls-dyna_971_manual_k下載 
多目標設置為最小化鉚釘最大應力、最小化下板最大等效塑性應變、最小化鉚接力、最大化互鎖值。
3232 3
西瓜太郎. ??? 3年前
20條/頁 
 239
239 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
