



從零開始:如何在現(xiàn)有實(shí)驗(yàn)室基礎(chǔ)上打造高效潔凈實(shí)驗(yàn)室?
下面實(shí)驗(yàn)室裝修公司小編將分享實(shí)用的潔凈實(shí)驗(yàn)室改造設(shè)計(jì)技巧和解決方案,在潔凈實(shí)驗(yàn)室改造過程中避免常見的陷阱,并確保最終實(shí)驗(yàn)室達(dá)到預(yù)期的潔凈度要求。 一、需求分析和規(guī)劃1.潔凈等級改造潔凈實(shí)驗(yàn)室的第一步是確定所需的潔凈等級。潔凈等級通常依據(jù)ISO 14644標(biāo)準(zhǔn)進(jìn)行劃分,主要分為ISO 1到ISO 9級別。
2144
用戶_46334 ??? 1年前
潔凈室中顆粒物傳感器的應(yīng)用 
潔凈室,也叫無塵室或者清靜室,是具備空氣過濾、分配、優(yōu)化、構(gòu)建材料與裝置的房間,是控制污染及交叉污染的基礎(chǔ),其中特定標(biāo)準(zhǔn)操作程序以控制空氣懸浮微粒、浮游菌濃度,以達(dá)到適當(dāng)?shù)?em>潔凈度級別。潔凈室的主要作用是對物料進(jìn)行控制,產(chǎn)品接觸的空氣包含溫度、濕度、使制品具有良好的生產(chǎn)、儲存空間。潔凈室的發(fā)展與現(xiàn)代工業(yè)、尖端技術(shù)密切聯(lián)系在一起。
1911
大愛技術(shù) ??? 4年前
如何用計(jì)算流體力學(xué)指導(dǎo)手術(shù)室潔凈空調(diào)運(yùn)行優(yōu)化 
2、手術(shù)室模型構(gòu)建 國內(nèi)外先后有多位學(xué)者采用CFD方法對I、II級手術(shù)室的氣流和溫濕度分布進(jìn)行了數(shù)值模擬【1】、【2】、【3】,有一定的參考意義,但都是基于理想條件,缺少實(shí)際在用的手術(shù)室模型參數(shù)來指導(dǎo)潔凈空調(diào)系統(tǒng)的運(yùn)行。
3024 1 1
CFD流體分析 ??? 4年前
質(zhì)量流量防堵塞傳感器在潔凈室HVAC系統(tǒng)氣流控制應(yīng)用方案 
下面工采網(wǎng)通過本文介紹一下潔凈室HVAC系統(tǒng)氣流控制。 潔凈室氣流形式可以分為單向流或非單向流兩種。如果綜合利用兩種氣流,通常叫做混合氣流。關(guān)鍵區(qū)域的氣流流型是一個(gè)關(guān)鍵的技術(shù)要求。
2440
工采網(wǎng) ??? 2年前
CFD專欄丨Flow Simulator案例:航空發(fā)動機(jī)燃燒室一維仿真 
在高空低氧條件下,預(yù)判燃燒室熄火風(fēng)險(xiǎn)并優(yōu)化點(diǎn)火策略。</li></ol><p><br></p><p><strong>? 一維燃燒室仿真的優(yōu)勢與局限</strong></p><p><br></p><p><strong>優(yōu)勢</strong></p><ol><li>用“分段建模”代替復(fù)雜的多維計(jì)算,每個(gè)控制體代表一個(gè)平均狀態(tài)的流動單元。計(jì)算速度比三維仿真快百倍以上,適合早期設(shè)計(jì)迭代。
3476 1 1
ALTAIR ??? 1年前
轎車駕駛室熱舒適性仿真模型?
有償求轎車駕駛室熱舒適性仿真模型
2050 6 2
aiyue ??? 3年前
自主仿真 | 燃燒室PERA SIM PreCFD高級CFD網(wǎng)格劃分方法 
因此發(fā)展燃燒室數(shù)值分析技術(shù),這對深入了解燃燒室內(nèi)各工作過程、指導(dǎo)與優(yōu)化燃燒室設(shè)計(jì)是至關(guān)重要,網(wǎng)格劃分作為數(shù)值仿真的基礎(chǔ)十分重要,網(wǎng)格質(zhì)量的好壞直接決定了仿真計(jì)算結(jié)果的準(zhǔn)確性,本文以燃燒室模型為例,詳細(xì)介紹安世亞太自主開發(fā)的CFD前處理軟件PERA SIM PreCFD網(wǎng)格劃分流程。二、網(wǎng)格流程劃分1.
2269
安世亞太 ??? 3年前
斷路器滅弧室電弧重燃現(xiàn)象的仿真 
除此之外,電弧還可能發(fā)生背后擊穿,在滅弧柵片的后方,電弧運(yùn)動過去之后發(fā)生短接,從而降低電弧電壓所以這種情況不是我們想看到的結(jié)果,這就需要我們將電弧最好同時(shí)通過滅弧柵片達(dá)到提高電弧電壓的目的 電弧仿真可以模擬電弧進(jìn)入柵片,動靜觸頭打開,電弧電壓上升,能夠很好的獲取變化電流運(yùn)動過程,查看其效果觀察柵片的布局合理性,觀察電壓變化過程,為滅弧室設(shè)計(jì)提共很好的支撐關(guān)鍵詞:斷路器 電弧仿真
2905 2
電弧仿真 ??? 4年前
設(shè)計(jì)仿真 | 海克斯康與河南科技大學(xué)共建高端軸承聯(lián)合仿真實(shí)驗(yàn)室 
聯(lián)合實(shí)驗(yàn)室將為學(xué)生提供更多實(shí)踐機(jī)會,讓學(xué)生在實(shí)踐中掌握先進(jìn)的仿真技術(shù)和設(shè)計(jì)理念,培養(yǎng)更多具備創(chuàng)新能力和實(shí)踐經(jīng)驗(yàn)的高端技術(shù)人才。在第十二屆軸承論壇期間,海克斯康進(jìn)行了軸承設(shè)計(jì)仿真主題演講與方案展示。
2307
海克斯康設(shè)計(jì)與仿真 ??? 1年前
工程應(yīng)用 | Hyundai輕卡駕駛室聲學(xué)包仿真與驗(yàn)證 
駕駛室外部會增加一層或多層聲腔,用以仿真聲音在車輛周圍的傳播。外部聲腔的自由面與SEA半無限流體(SIF,Semi-Infinite Fluids)相連。SIF是代表聲能量的匯聚,可表示為噪聲在自由場中的傳播。</p><p><br></p><p>整車SEA板及聲腔生成后可以自動生成連接Junction并進(jìn)行連接的檢查,這些連接代表子系統(tǒng)間能量的傳遞。
3180
HBK聲學(xué)與振動 ??? 2年前
你想知道的CFD仿真分析流程在這里! 附計(jì)算流體動力學(xué)分析:CFD軟件原理與應(yīng)用下載 
車間速度云圖 矢量圖 車間速度矢量圖 空氣齡 潔凈室空氣齡圖 粒子沉積 下載地址:計(jì)算流體動力學(xué)分析:CFD軟件原理與應(yīng)用
4437 1
langnao4405 ??? 4年前
分子生物學(xué)實(shí)驗(yàn)室設(shè)計(jì)方案 
中壹聯(lián)實(shí)驗(yàn)室裝修公司小編將詳細(xì)闡述分子生物學(xué)實(shí)驗(yàn)室設(shè)計(jì)的原則、各功能區(qū)布局及設(shè)備配置。 一、分子生物學(xué)實(shí)驗(yàn)室設(shè)計(jì)原則 1.無菌操作保障:植物組織培養(yǎng)及大多數(shù)分子生物學(xué)實(shí)驗(yàn)需要在嚴(yán)格的無菌條件下進(jìn)行。實(shí)驗(yàn)室設(shè)計(jì)的首要原則是確保無菌操作,從而防止污染。無菌操作不僅包括設(shè)備和器材的無菌,還涉及到操作環(huán)境的潔凈度。
2170
用戶_46334 ??? 1年前
風(fēng)冷冰箱機(jī)械室CFD分析及其能耗影響研究 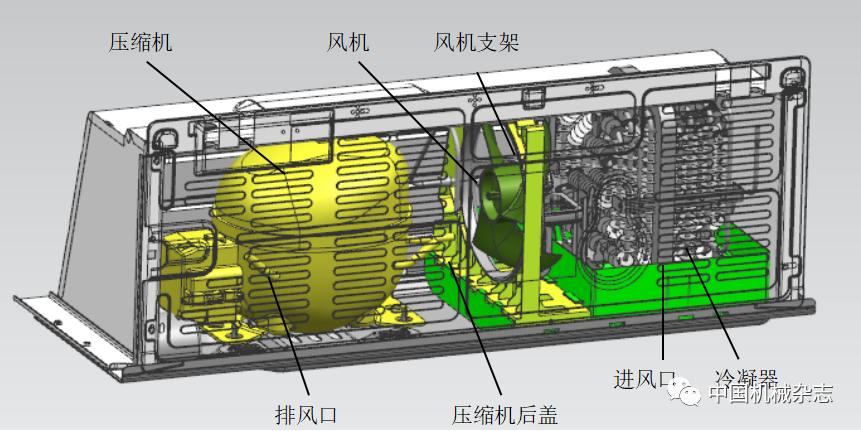
1.3 仿真結(jié)果與分析 原機(jī)方案機(jī)械室仿真流場圖如圖3所示,原機(jī)方案進(jìn)排風(fēng)流量如表1所示。
3178 3 3
我愛汽輪機(jī)仿真 ??? 2年前
設(shè)計(jì)仿真 | 直播預(yù)告-借助CFD仿真技術(shù)高效模擬城市熱島效應(yīng) 
Cradle CFD 軟件因其獨(dú)特的高魯棒性像素網(wǎng)格和基于結(jié)構(gòu)化網(wǎng)格的高速求解技術(shù),能對城市熱島效應(yīng)進(jìn)行快速、高保真模擬仿真,并能借助CFD仿真技術(shù)高效設(shè)計(jì)建筑環(huán)境、暖通空調(diào)與潔凈系統(tǒng)來指導(dǎo)改善熱島效應(yīng)。
2505
海克斯康設(shè)計(jì)與仿真 ??? 3年前
【機(jī)器人仿真案例】基于RecurDyn Durability預(yù)測機(jī)器人夾爪疲勞壽命 
半導(dǎo)體專用機(jī)器人夾爪的一個(gè)核心特性是:以極小接觸面積抓取物件,從而滿足潔凈室的潔凈度要求。因此,夾爪在結(jié)構(gòu)上受到諸多限制,同時(shí)相較于其機(jī)械結(jié)構(gòu)尺寸,還需承載相對較重的物件。此外,為滿足運(yùn)輸產(chǎn)能需求,上下料作業(yè)需每日重復(fù)執(zhí)行數(shù)千次。本案例基于多體動力學(xué)模型,對一款面向半導(dǎo)體物料搬運(yùn)研發(fā)的專用機(jī)器人夾爪進(jìn)行夾持力預(yù)測分析。
1430
杭州擬創(chuàng)(RecurDyn原廠) ??? 1月前
GB14444-2025噴漆室安全新規(guī)要求應(yīng)安裝可燃?xì)怏w探測器 
使用涂裝噴漆房(噴漆室)是漆霧凈化的方法之一。噴漆房也稱為噴漆室,是一種專門用于工件表面涂裝作業(yè)的封閉或半封閉空間,通過科學(xué)的空氣動力學(xué)設(shè)計(jì)和環(huán)境控制,實(shí)現(xiàn)對噴漆過程中產(chǎn)生的漆霧、揮發(fā)性有機(jī)化合物(VOCs)的有效收集與處理,同時(shí)為涂裝作業(yè)提供潔凈、安全、穩(wěn)定的工作環(huán)境,確保涂裝質(zhì)量并保護(hù)操作人員健康及周邊環(huán)境。在噴漆作業(yè)環(huán)境中,各類可燃、易燃液體涂料被廣泛使用。
3119
大愛技術(shù) ??? 1月前
軸承安裝不當(dāng)?shù)脑\斷與分析? 
因此,軸承安裝過程中,最重要的因素之一就是潔凈度。這個(gè)潔凈度包括軸承安裝環(huán)境的潔凈度、軸承安裝工具的潔凈度、軸、軸承室的潔凈度等。這些都需要在軸承安裝之前做好清潔工作。除此之外,也需要避免在軸承安裝過程中造成對軸承、潤滑等的污染。安裝力通過滾動體對于不可分離式軸承,軸承外圈和內(nèi)圈往往是一體的。通常軸承和軸或者軸承室會至少有一個(gè)配合為緊配合。
2332 1
軸承問題終結(jié)者 ??? 3年前
基于HyperWorks的司機(jī)室防撞柱的輕量化設(shè)計(jì) 
以某型內(nèi)燃機(jī)車司機(jī)室防撞柱為對象,使用有限元分析軟件HyperWorks完成該模型的結(jié)構(gòu)強(qiáng)度仿真,并對模型進(jìn)行輕量化設(shè)計(jì)改進(jìn),在滿足設(shè)計(jì)要求的前提下,結(jié)構(gòu)質(zhì)量降低了20.7%,達(dá)到了輕量化的目的。1 防撞柱結(jié)構(gòu)仿真司機(jī)室防撞柱是由底板、側(cè)墻、立柱、橫梁等零件焊接組成的承載結(jié)構(gòu),其有限元模型如圖1所示,以面單元為主劃分網(wǎng)格,共有6 088個(gè)節(jié)點(diǎn)和6 245個(gè)網(wǎng)格。
4381 4
清風(fēng)徐來asd ??? 2年前
基于統(tǒng)計(jì)能量分析方法的工程車輛駕駛室聲學(xué)包優(yōu)化 附統(tǒng)計(jì)能量分析原理及其應(yīng)用下載 
本文針對某型工程車輛,應(yīng)用統(tǒng)計(jì)能量分析方法分析預(yù)測駕駛室司機(jī)耳旁噪聲,并對比試驗(yàn)結(jié)果校核模型。根據(jù)仿真數(shù)據(jù)進(jìn)行噪聲源分析,確定聲學(xué)包優(yōu)化方案,通過仿真與試驗(yàn)方法確定優(yōu)化效果。
3089 1
知識通 ??? 4年前
兩機(jī)仿真丨624所:整機(jī)全三維仿真技術(shù)加速航空發(fā)動機(jī)研發(fā) 
從發(fā)動機(jī)燃燒室與渦輪耦合仿真結(jié)果,可以看到主燃燒室核心區(qū)速度很低,屬于不可壓縮流動,渦輪導(dǎo)向器區(qū)域?yàn)楦咚俚目蓧嚎s流,通過多方位對湍流模型參數(shù)選取及交界面數(shù)據(jù)傳遞參數(shù)的設(shè)定,最終實(shí)現(xiàn)了主燃燒室與渦輪高精度耦合仿真(見圖3),獲取了不可壓縮流與可壓縮流參數(shù)的高精度耦合數(shù)據(jù)傳遞方法。
5451 3
Space ONE ??? 2年前
20條/頁 
 51
51 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
