



AMESim電控單體泵高速電磁閥多目標(biāo)優(yōu)化分析 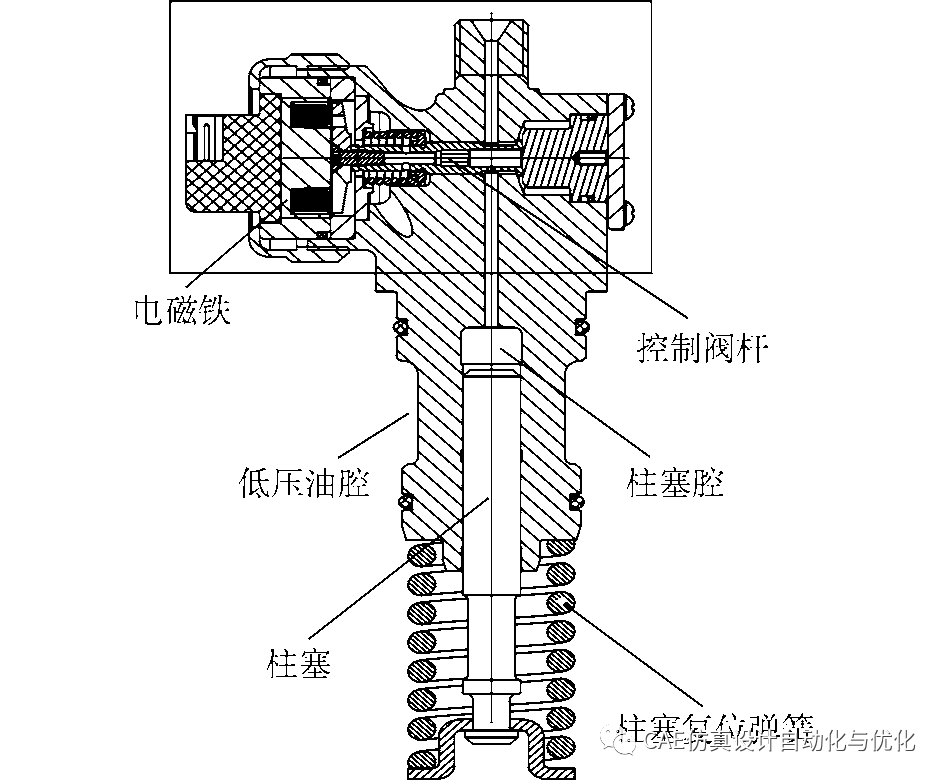
4.3 多目標(biāo)優(yōu)化模型 圖7所示為多目標(biāo)優(yōu)化平臺modeFRONTIER與AMESim聯(lián)合仿真模型,首先實驗設(shè)計隨機產(chǎn)生輸入變量的相互組合,即賦予遺傳算法初始值,經(jīng)過AMESim計算得出輸出變量的值,優(yōu)化算法再根據(jù)目標(biāo)函數(shù)的要求進行選擇優(yōu)化參數(shù)的變異和交換等操作,從而達到優(yōu)化目的。
2985 1
技術(shù)哥 ??? 3年前
多特征融合的多目標(biāo)跟蹤網(wǎng)絡(luò) 
以上基于聚類的無監(jiān)督方法可以獲得一定的場景泛化能力來應(yīng)對光線變化,但僅使用二維圖像對復(fù)雜場景分割的精度依舊有限且難以進行場景感知,亦存在較多局限性。 針對室內(nèi)場景目標(biāo)多種多樣,各目標(biāo)之間差異較大,比如有靠椅、有凳子等,傳統(tǒng)圖像算法難以完整的分割出目標(biāo),且難以獲得類別標(biāo)簽等更多的信息。
2536
駕駛哥 ??? 4年前
深度學(xué)習(xí)|基于MobileNet的多目標(biāo)跟蹤深度學(xué)習(xí)算法 
關(guān)鍵詞深度學(xué)習(xí) 多目標(biāo)跟蹤 目標(biāo)檢測 YOLOv3 deep-SORT MobileNet0 引言多目標(biāo)跟蹤是計算機視覺領(lǐng)域的研究熱點, 可應(yīng)用于交通監(jiān)測、安防等多個領(lǐng)域, 具有一定的應(yīng)用價值和挑戰(zhàn)性[1]. 檢測方式可以分為檢測跟蹤和無檢測跟蹤兩類, 前者需要檢測目標(biāo)后再進行跟蹤; 后者需要在第1幀手動初始化目標(biāo), 然后進行跟蹤.
2441 1
龍騰AI技術(shù) ??? 3年前
ABAQUS模擬多道次變形的變量繼承方法 
一、引言 使用ABAQUS進行多道次加工時,往往牽扯道次之間變量的繼承(如晶粒尺寸、累積損傷等),這對多道次變形模擬結(jié)果的準(zhǔn)確性有較大的影響。本文以VUHARD子程序及簡單的熱壓縮模型為例,分享雙道次壓縮之間的晶粒尺寸的繼承方法。
3087 13 12
CAErkd ??? 2年前
基于深度學(xué)習(xí)的多目標(biāo)跟蹤算法原理 
將神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)到的目標(biāo)的表觀特征引入到多目標(biāo)跟蹤算法中,是提升多目標(biāo)跟蹤算法效果的最簡單直接的辦法。其具體的操作方法有以下幾種:利用在圖像識別或行人重識別任務(wù)訓(xùn)練得到的特征提取網(wǎng)絡(luò),直接替換現(xiàn)有的多目標(biāo)跟蹤算法框架中的表觀特征提取模塊;采用深度神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)光流運動特征,將光流網(wǎng)絡(luò)引入到算法中計算目標(biāo)之間的運動相關(guān)性等。而通過深度學(xué)習(xí)提升多目標(biāo)跟蹤算法更加直接的方法是學(xué)習(xí)檢測之間的特征相似性。
3204
駕駛哥 ??? 4年前
214基于matlab的交互多模算法(IMM)機動目標(biāo)跟蹤算法 
基于matlab的交互多模算法(IMM)機動目標(biāo)跟蹤算法,完整的15頁文檔論文。根據(jù)二維空間內(nèi)目標(biāo)作勻速直線運動和勻速圓周運動的特點,在建立目標(biāo)運動模型和觀測模型的基礎(chǔ)上采用基于交互多模算法(IMM)的卡爾曼濾波器對機動目標(biāo)進行跟蹤。仿真結(jié)果表明,該算法不僅能夠?qū)蛩僦本€運動和勻速圓周運動的目標(biāo)進行跟蹤,而且在運動模型發(fā)生變化時,濾波誤差也比較小。
2119
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
234 基于matlab的螢火蟲算法多變量尋優(yōu) 
基于matlab的螢火蟲算法多變量尋優(yōu),通過設(shè)置變量范圍,用于尋找多目標(biāo)時的最優(yōu)值,效果比較理想,未陷于局部最大值。結(jié)果可以通過動圖展示出來。顯示二維和三維尋優(yōu)結(jié)果。程序已調(diào)通,可直接運行。
2231
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
hypermesh多目標(biāo)優(yōu)化要注意那些問題?
hypermesh多目標(biāo)優(yōu)化要注意那些問題?
2748 5 1
lz1234 ??? 1年前
hypermesh多目標(biāo)加權(quán),怎么加權(quán)?
hypermesh多目標(biāo)加權(quán),怎么加權(quán)?
2230 2
lz1234 ??? 1年前
基于LS-DYNA的鉚接工藝多目標(biāo)優(yōu)化仿真 附ls-dyna_971_manual_k下載 
4.2 分析結(jié)果鉚釘應(yīng)力結(jié)果:下板材料等效塑性應(yīng)變結(jié)果:鉚接力結(jié)果:互鎖值:五.基于LS-DYNA和LS-OPT的多目標(biāo)優(yōu)化5.1 設(shè)計變量針對鉚釘和底模共建立5個形狀參數(shù)變量,包括:1、鉚釘外切角;2、鉚釘內(nèi)切角;3、鉚釘內(nèi)半徑;4、底模內(nèi)凸高度;5、底模內(nèi)半徑等5個參數(shù)。見圖8。
3230 3
西瓜太郎. ??? 3年前
ABAQUS導(dǎo)入初始場變量(預(yù)定義場)多次低速沖擊以及沖擊后壓縮 
ABAQUS導(dǎo)入初始場變量(預(yù)定義場) 通常利用ABAQUS計算時,需要多步驟分析,例如計算多次低速沖擊以及沖擊后壓縮等,下面詳細(xì)描述利用數(shù)據(jù)傳遞方法進行多步驟分析。(建議購買視頻,視頻內(nèi)包含此帖子) 導(dǎo)入效果圖如下: 導(dǎo)入的損傷云圖 導(dǎo)入的應(yīng)力場 導(dǎo)入的位移場 分層損傷的導(dǎo)入 1.
5207 4 41
復(fù)合材料有限元分析 ??? 3年前
多目標(biāo)優(yōu)化時量綱歸一化問題?
我有兩個目標(biāo)函數(shù)分別是力均勻性和形面精度,需將這兩個目標(biāo)函數(shù)轉(zhuǎn)換成一個目標(biāo)函數(shù)f。在歸一化過程中,f1max,f1min,這些界限值是怎么選取的?是根據(jù)實際的需求,設(shè)定為固定值;還是說f1max f1min是要隨著迭代過程進行也進行變化?
2652 1 3
劉嫣然 ??? 3年前
226 基于matlab的改進的量子遺傳算法對多變量函數(shù)尋優(yōu)完整代碼 
基于matlab的改進的量子遺傳算法對多變量函數(shù)尋優(yōu)完整代碼,內(nèi)容詳細(xì),包含運行說明,該代碼在量子旋轉(zhuǎn)門調(diào)整中做了一些改進,在“Qgate1”中可以看到,旋轉(zhuǎn)角度并不是固定不變的,而是將其與適應(yīng)度以及根的值聯(lián)系起來,使得計算更為精確。程序已調(diào)通,可直接運行。
2348
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于optistruct汽車控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化案例 
本例以汽車控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化為例,講述在optistruct中是如何進行多目標(biāo)拓?fù)鋬?yōu)化,非公式,目的就是快速得到傳遞路徑,與傳統(tǒng)輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學(xué)也可以聯(lián)系我,有相關(guān)的資料購買后對于模型中不懂的地方都可以問
2225 1 9
lz1234 ??? 3年前
IPM電機隔磁橋電磁&結(jié)構(gòu)多目標(biāo)優(yōu)化設(shè)計 
因此,如何在隔磁橋的尺寸設(shè)計中兼顧電磁性能和結(jié)構(gòu)強度,成為一個典型的多物理場權(quán)衡設(shè)計問題。然而,僅憑借經(jīng)驗來設(shè)計滿足所有設(shè)計任務(wù)要求的轉(zhuǎn)子隔磁橋尺寸非常具有挑戰(zhàn)性。在這個案例中,我們將展示如何利用Maxwell UDP(參數(shù)化轉(zhuǎn)子幾何),結(jié)合Ansys Maxwell、Mechanical和optiSLang,來實現(xiàn)對IPM轉(zhuǎn)子隔磁橋進行多物理、多目標(biāo)優(yōu)化設(shè)計。
2655
上海笛佼信息科技有限公司 ??? 2年前
SerDes設(shè)計中高速傳輸線的人工智能驅(qū)動多參數(shù)多目標(biāo)優(yōu)化流程(7月29日直播) 
7月29日,Ansys官方研討會『SerDes設(shè)計中高速傳輸線的人工智能驅(qū)動多參數(shù)多目標(biāo)優(yōu)化流程』為您分享如何借助Ansys RaptorAI,通過人工智能技術(shù)實現(xiàn)SerDes(高速傳輸線)的多參數(shù)、多目標(biāo)協(xié)同優(yōu)化,加速設(shè)計流程、提升設(shè)計質(zhì)量。
2577
技術(shù)鄰公告 ??? 9月前
基于ANSYS的function多段函數(shù)為ansysworkbench中多變量載荷添加(無聲版本) 

基于ANSYS的function多段函數(shù)為ansysworkbench中多變量載荷添加基于對于一個結(jié)構(gòu)的熱對流分析
31
北緯35 ??? 6年前
Isight--響應(yīng)面分析+單目標(biāo)或多目標(biāo)優(yōu)化--操作流程 
本節(jié)課主要講解一下如何用Isight讀取已經(jīng)處理好的數(shù)據(jù)進行響應(yīng)面近似模型建立以及用NLPQL 算法為例進行講解單目標(biāo)優(yōu)化問題。多目標(biāo)優(yōu)化問題類似處理。
143 4
東邪不邪 ??? 4年前
多目標(biāo)遺傳算法實際案例——運輸問題的matlab目標(biāo)函數(shù)代碼詳解 
該視頻介紹了一個具體運輸問題的多目標(biāo)遺傳算法的應(yīng)用,詳細(xì)介紹了matlab目標(biāo)函數(shù)編碼
8
活潑可男_matlab教學(xué) ??? 1年前
230基于matlab的布谷鳥(COA)多目標(biāo)優(yōu)化算法 
基于matlab的布谷鳥(COA)多目標(biāo)優(yōu)化算法,以 滿意度、成本、時間、質(zhì)量為目標(biāo)的多目標(biāo)優(yōu)化求解代碼。程序已調(diào)通,可直接運行。
2093
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
20條/頁 
 251
251 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
