



伺服電機、變頻電機、普通電機之間有什么區別? 
伺服的基本概念是準確、精確、快速定位。變頻是伺服控制的一個必須的內部環節,伺服驅動器中同樣存在變頻(要進行無級調速)。但伺服將電流環速度環或者位置環都閉合進行控制,這是很大的區別。除此外,伺服電機的構造與普通電機是有區別的,要滿足快速響應和準確定位。
2086
非標機械論壇 ??? 3年前
基于PLC的閥門生產線控制系統設計與仿真分析 
對于閥門生產線來說,由于產品結構相對簡單、產品種類較為單一,因此可以選擇低階傳遞函數,在滿足加工精度和制造效率的前提下,降低模型的開發難度。文章選用的一階傳遞函數為這里以伺服電機為例,結合其技術參數,其傳遞函數為其次是確定控制方式。文章選擇PID控制方式,控制器在接收輸入信號后,以比例形式反映偏差信號,保證了更加精確的識別偏差。
4350 4 1
機械工程師 ??? 2年前
伺服電機脈沖,模擬量和通訊控制原理及拓展(附圖文詳解)99%的電氣老師傅都收藏了! 
第2環是速度環,通過檢測的電機編碼器的信號來進行負反饋PID調節,它的環內PID輸出直接就是電流環的設定,所以速度環控制時就包含了速度環和電流環,換句話說任何模式都必須使用電流環,電流環是控制的根本,在速度和位置控制的同時系統實際也在進行電流(轉矩)的控制以達到對速度和位置的相應控制。
2876 1
電工電氣一網通 ??? 4年前
【伺服電機特點及未來發展方向】- 米思米機械設備知識分享 
要求伺服電機在低速時有足夠大的輸出力矩且運轉平穩,以便在與機械運動部分連接中盡量減少中間環節。(4)寬調速范圍的速度調節系統,即速度伺服系統:從系統的控制結構看,數控機床的位置閉環系統可看作是位置調節為外環、速度調節為內環的雙閉環自動控制系統,其內部的實際工作過程是把位置控制輸入轉換成相應的速度給定信號后,再通過調速系統驅動伺服電機,實現實際位移。
2342
MISUMI米 ??? 2年前
3種伺服電機控制方式,很多PLC工程師都不了解! 
伺服電機一般為三個環控制,所謂三環就是3個閉環負反饋PID調節系統。
1968 1
電工電氣一網通 ??? 4年前
PLC工程師都應了解的3種伺服電機控制方式 
伺服電機速度控制和轉矩控制都是用模擬量來控制,位置控制是通過發脈沖來控制。具體采用什么控制方式要根據客戶的要求以及滿足何種運動功能來選擇。
2087
跟我學PLC ??? 4年前
造成伺服電機抖動的原因是什么? 
二.速度環問題引起的抖動: 速度環積分增益、速度環比例增益、加速度反饋增益等參數不當。增益越大,速度越大,慣性力越大,偏差越小,越易產生抖動。設定較小的增益可維持速度響應,不易產生抖動。
2017
木火柴 ??? 4年前
伺服電機和步進電機的區別 
,5,交流伺服驅動系統為閉環控制,驅動器可直接對電機編碼器反饋信號進行采樣,內部構成位置環和速度環,一般不會出現步進電機的丟步或過沖的現象,控制性能更為可靠。伺服電機是閉環系統,伺服驅動器可以自動修正丟失的脈沖,在堵轉時也可以及時給控制器反饋,而步進電機是開環系統,必須通過足夠的力矩余量來避免堵轉。6,步進電機和伺服電機速度響應性能不同。
2967 1
工廠物流自動化 ??? 4年前
設置伺服驅動器的8個關鍵參數 
在自動化設備中,經常用到伺服電機,特別是位置控制,大部分品牌的伺服電機都有位置控制功能,通過控制器發出脈沖來控制伺服電機運行,脈沖數對應轉的角度,脈沖頻率對應速度(與電子齒輪設定有關),當一個新的系統,參數不能工作時,首先設定位置增益,確保電機無噪音情況下,盡量設大些,轉動慣量比也非常重要,可通過自學習設定的數來參考,然后設定速度增益和速度積分時間,確保在低速運行時連續,位置精度受控即可。
2308
非標機械論壇 ??? 4年前
【米思米機械設備知識分享】- 在性能上伺服電機和步進電機有哪些區別 
交流伺服電機具有較強的過載能力。 5.運行性能不同步進電機的控制為開環控制,啟動頻率過高或負載過大易出現丟步或堵轉的現象交流伺服驅動系統為閉環控制,驅動器可直接對電機編碼器反饋信號進行采樣,控制性能更為可靠。 6.速度響應性能不同步進電機從靜止加速到工作轉速(一般為每分鐘幾百轉)需要200~400毫秒。
2647
MISUMI米 ??? 3年前
頻響函數及其與傳遞函數的關系|穩定裕度的理解 
根據個人理解,一個閉環系統的絕對穩定性和相對穩定性都是通過其開環傳遞函數來判定的。閉環系統的開環傳遞函數其實是將帶反饋環節的閉環系統結構圖變換為單位反饋的形式后,該單位反饋結構圖中開環環節的傳遞函數(王天威P91)。閉環傳遞函數與其對應的開環傳遞函數的關系如下圖:其中G表示開環傳遞函數,Φ表示閉環傳遞函數。將該表達式中的s的實部取0即得到系統的頻響函數。
2573 3 1
數峰青 ??? 1年前
搭建你的專屬電機“考場”從伺服電機到牽引電機,一桌搞定 
主要特點:專注于推力、齒槽力、反電勢常數等直線電機和關鍵參數測試 。行業應用實例:科研機構:中國科學院寧波材料所提供直線電機測試服務,可測比較大連續推力達14700N,推力測試精度1% 。仿真與HIL試驗平臺測試對象:電機控制器、復雜電機驅動系統 。主要特點:采用功率硬件在環(PHIL)技術,可模擬不同電機類型,實現快速控制原型和系統級測試 。
2317
威岳13780573715 ??? 2月前
案例參考 | 智能防抖叉勺的設計 
伺服系統可以根據物體的位置、狀態、方位等輸出被控量能夠跟隨輸入信號進行自動的任意的變化的控制系統。伺服電機本身具有發射脈沖的功能,伺服電機每旋轉一次角度都會產生相應的脈沖,和伺服電機接受的脈沖相互呼應,從而實現精確的定位與反饋。伺服系統可以根據傳感系統進行相應的變化,從而平衡叉勺在Y軸與Z 軸的轉動,限制其自由度。同時采用雙閉環直流調速系統,其具備動態響應迅速、抗干擾能力強的優勢。
3383
電子產品世界 ??? 3年前
機器人/舞臺燈常用電機驅動控制芯片SS6810R 
所采用的關節驅動電動機主要是AC伺服電動機,步進電動機和DC伺服電動機。(圖片來源:無版權圖庫)其中,交流伺服電動機、直流伺服電動機、直接驅動電動機(DD)均采用位置閉環控制,一般應用于高精度、高速度的機器人驅動系統中。步進電動機驅動系統多適用于對精度、速度要求不高的小型簡易機器人開環系統中。交流伺服電動機由于采用電子換向,無換向火花,在易燃易爆環境中得到了廣泛的使用。
2193
工采電子 ??? 3年前
驅動電機NVH問題治理的原理·方法·過程 
可以通過調整電機的速度環、電流環參數可以使問題緩解,也可以控制油門開度減弱轉矩階躍強度,但都不能徹底解決問題。豐田在THSII中采用了電機角加速度閉環的方式,較好的解決了這個問題。其原理很簡單,如下圖所示:增加了一個角加速度閉環后,能夠控制在轉矩突變時通過主動調整扭矩,控制角加速度變化值。這樣做能夠降低車內抖動的原理是認為:“ 電機的角加速和車內抖動是高度相關的”。
6534 10 1
聲學工程師小吳 ??? 2年前
【伺服電機操作方法說明】- 米思米機械設備知識分享 
三、伺服電機允許的軸端負載 確保在安裝和運轉時加到伺服電機軸上的徑向和軸向負載控制在每種型號的規定值以內。步進驅動器也是如此。 伺服電機是指在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。
2118
MISUMI米 ??? 2年前
【米思米工業產品知識分享】- 步進電機和伺服電機的區別和工作原理 
步進電機工作原理:通過控制電脈沖可以實現對步進電機的轉向、速度和旋轉角度的控制;伺服電機工作原理:驅動控制對象。被控對象受信號電壓大小和極性控制,電機的轉動速度和方向也跟著變化。 步進電機基于最基本的電磁鐵原理,它是一種可以自由回轉的電磁鐵,步進電機動作原理是依靠氣隙磁導的變化來產生電磁轉矩。當電流流過定子繞組時,定子繞組產生一矢量磁場。
1962
MISUMI米 ??? 3年前
基于AVL EXCITE M與Simulink控制耦合的電機諧波注入NVH分析 
基于AVL EXCITE M與Simulink控制耦合的電機諧波注入NVH分析前言 在新能源汽車、工業伺服系統等核心應用場景中,電驅系統的高頻嘯叫與低頻轟鳴問題,已成為制約產品 NVH(振動噪聲)性能提升的核心痛點與技術難題。
2499
AVL先進模擬技術 ??? 4月前
干貨!電工必備的25個電工知識你都掌握了嗎? 
主要根據電刷的工作條件是否滿足電流密度(a/cm2)和集電環園周邊緣的線速度(m/s)來確定。確定公式:①電刷載流量(a)=電刷電流密度(a/cm2)×電刷寬度l(cm)×電刷厚度b(cm)≥電機轉子額定電流(a)②集電環園周邊緣的線速度(m/s)=電動機額定轉速(r/m)/60(s)×集電環周長(m)≤電刷適用的規定范圍(m/s)其常用電刷有不墨電刷、電化石墨電刷和金屬石墨電刷三種。
2339
化工707 ??? 3年前
雙工位雙向臥式框架伺服數控擠壓液壓機設計與開發 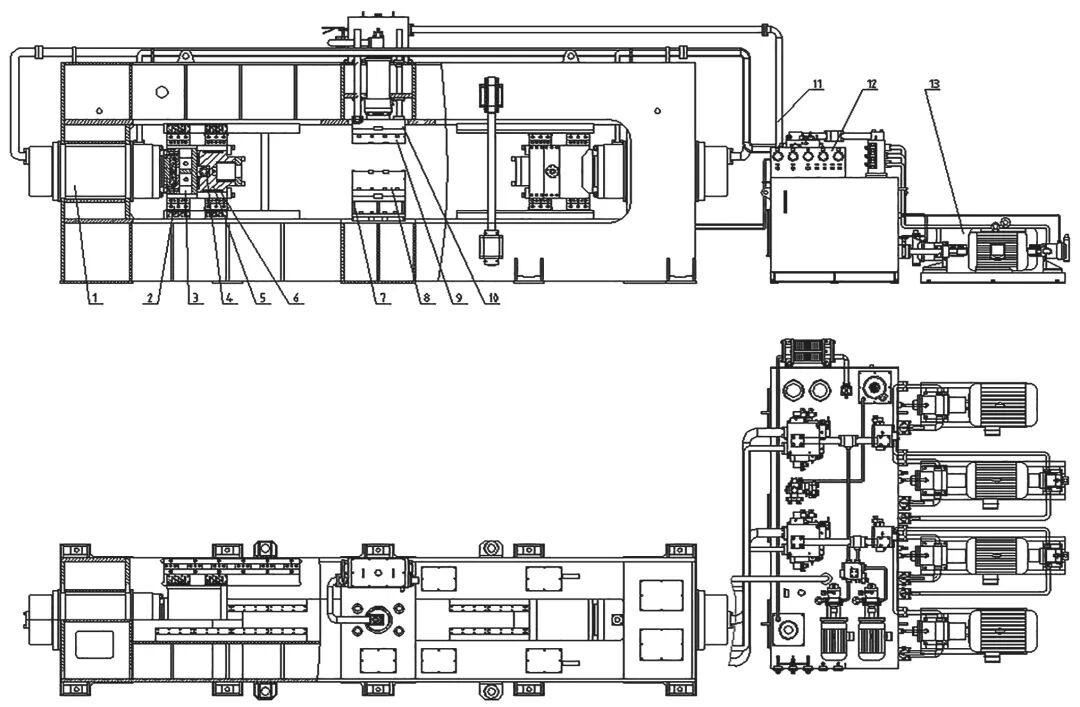
2)采用變頻減速電機與齒輪齒條導向機構的結合,可保證工件在運行時的速度可控可調;保證工件在運行時無沖擊和顫動等現象的發生。兩側均設有轉動皮帶機構,可保證整機傳動機構的同步與平穩,無噪聲、節能、持久耐用且便于維護保養。3)導向套和上下導向桿中的機構,采用四柱式導向結構并且導向長度長、間隙合理,導向精度高,抗偏載能力強。
3280 1
FMMM ??? 3年前
20條/頁 
 42
42 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
