



雙梁橋式起重機(jī)箱形偏軌主梁CAE設(shè)計(jì)方法 
way = exe &"–pANE3FL–dir"&path&"–jjob-b –i"&path &"\\ANSYS.txt"&" -o "& path &"\\dai-fileout.txt",該代碼需要結(jié)合shell函數(shù)使用,其作用為定義shell函數(shù)所調(diào)用的外部軟件的名稱和路徑等。
4883 5
星空caer ??? 2年前
ANSYS APDL斜拉橋精細(xì)化建模與仿真分析案例 
模型文件stayedCableBridge.cdb:已生成的有限元模型數(shù)據(jù)庫(kù),包含幾何、單元、材料及邊界條件定義,可直接導(dǎo)入ANSYS進(jìn)行求解或后處理。【也可以直接接入到命令界面進(jìn)行修改】Stayed Cable Bridge.mac:模型分析的APDL命令流腳本,含求解及后處理等關(guān)鍵步驟包括。1.2.2.
4419 4 1
YHT_CAE ??? 9月前
結(jié)構(gòu)優(yōu)化設(shè)計(jì)分析系列(三):APDL在Workbench中的優(yōu)化設(shè)計(jì) 
21890 kgW = (maximum) = 0.87834 rad/secDirect stress = 2.0386e7 PaBuckling stress = 6.1526e6 Pa1.5 ANSYS分析在Ansys Workbench中導(dǎo)入APDL文件,并新建優(yōu)化設(shè)計(jì)分析如下圖示:在Mechanical APDL中的Analysis將APDL的參數(shù)定義好是輸入?yún)?shù)還是輸出參數(shù)
2772 3 1
鐘偉良 ??? 10月前
使用ANSYS Workbench進(jìn)行房屋隔熱分析 
房屋幾何模型 第二步定義材料參數(shù)的時(shí)候,這里手動(dòng)輸入,因?yàn)榇蟛糠值男』锇閼?yīng)該和我是一樣沒有購(gòu)買材料模型庫(kù),如果您已經(jīng)購(gòu)買了材料庫(kù),您在composite材料庫(kù)就可以找到plywood,不用自行輸入?yún)?shù)。 在用Workbench之前我使用的是APDL,往往還更習(xí)慣自己輸入?yún)?shù),材料庫(kù)里選擇的材料往往參數(shù)過多,很多用不上,還需要?jiǎng)h除。
3126 8 8
李安民 ??? 2年前
構(gòu)造二維周期性光柵結(jié)構(gòu) 
Path Diagram(3D Gratings)) 設(shè)置光柵結(jié)構(gòu) ? 首先,需要定義基底(Base Block)的厚度和介質(zhì)。
1762
追光ing ??? 3月前
VirtualLab:構(gòu)造二維周期性光柵結(jié)構(gòu) 
Path Diagram(3D Gratings))設(shè)置光柵結(jié)構(gòu)? 首先,需要定義基底(Base Block)的厚度和介質(zhì)。
2363
追光ing ??? 2年前
[VirtualLab] 構(gòu)造二維周期性光柵結(jié)構(gòu) ![[VirtualLab] 構(gòu)造二維周期性光柵結(jié)構(gòu)](https://img.jishulink.com/202602/attachment/bb77fb79ddd5494a8e712658e74a6e2f.png?image_process=resize,fw_294,fh_172,)
圖(三維光柵)(Pillar Grating Light Path Diagram(3D Gratings)) 設(shè)置光柵結(jié)構(gòu) ? 首先,需要定義基底(Base Block)的厚度和介質(zhì)。
1320
信光嗎 ??? 3月前
VirtualLab:構(gòu)造二維周期性光柵結(jié)構(gòu) 
Path Diagram(3D Gratings))設(shè)置光柵結(jié)構(gòu)? 首先,需要定義基底(Base Block)的厚度和介質(zhì)。
2580 1
追光ing ??? 2年前
APDL模擬增材制造-溫度場(chǎng)-應(yīng)力場(chǎng) 

運(yùn)用ANSYS二次開發(fā) APDL語言編輯出參數(shù)化程序來建立模型、控制和劃分網(wǎng)格、 定義材料參數(shù)、施加載荷與邊界條件、分析控制以及求解等完成有限元分析全部過程。在模擬成型過程中,通過改變溫度載荷的位置來模擬噴嘴的掃描移動(dòng),利用生死單元循環(huán)算法技術(shù)控制單元“生死”的激活來模擬材料的堆積增加,通過控制單元激活的時(shí)間間隔控制成型速度
kukufeng ??? 2年前
增材仿真:apdl+熱力耦合+生死單元+溫度場(chǎng)+應(yīng)力場(chǎng) 
運(yùn)用ANSYS二次開發(fā) APDL語言編輯出參數(shù)化程序來建立模型、控制和劃分網(wǎng)格、 定義材料參數(shù)、施加載荷與邊界條件、分析控制以及求解等完成有限元分析全部過程。在模擬成型過程中,通過改變溫度載荷的位置來仿真掃描移動(dòng),利用生死單元循環(huán)算法技術(shù)控制單元“生死”的激活來模擬材料的堆積增加,通過控制單元激活的時(shí)間間隔控制成型速度
2808 1
kukufeng ??? 2年前
APDL模擬增材制造-溫度場(chǎng)-應(yīng)力場(chǎng) 
需要相關(guān)命令流和操作加Q:2295356972------------------------------ 介紹:運(yùn)用ANSYS二次開發(fā) APDL語言編輯出參數(shù)化程序來建立模型、控制和劃分網(wǎng)格、 定義材料參數(shù)、施加載荷與邊界條件、分析控制以及求解等完成有限元分析全部過程。
kukufeng ??? 2年前
APDL模擬增材制造-溫度場(chǎng) 
需要相關(guān)命令流和操作加Q:2295356972------------------------------
介紹:運(yùn)用ANSYS二次開發(fā) APDL語言編輯出參數(shù)化程序來建立模型、控制和劃分網(wǎng)格、 定義材料參數(shù)、施加載荷與邊界條件、分析控制以及求解等完成有限元分析全部過程。
834 1
kukufeng ??? 2年前
Matlab調(diào)用ANSYS進(jìn)行參數(shù)優(yōu)化 
后面為遺傳算法迭代尋優(yōu)過程 運(yùn)行之后,在文件夾中會(huì)出現(xiàn)以下文件,其中beam.txt為100*6個(gè)參數(shù)數(shù)據(jù),weiyi.txt為每次計(jì)算時(shí)不同參數(shù)下位移的值,Dataread.mac和datawrite.mac兩個(gè)宏文件分別為數(shù)據(jù)讀取和寫入功能,bestvalue寫出最佳參數(shù)值,而test1.mac則是APDL語言寫成的批處理文件,以下給出部分文件截圖,有的圖片沒有截全
4056 19 5
龍飛宇 ??? 3年前
面向預(yù)期功能安全的決策規(guī)劃系統(tǒng)仿真測(cè)試方法 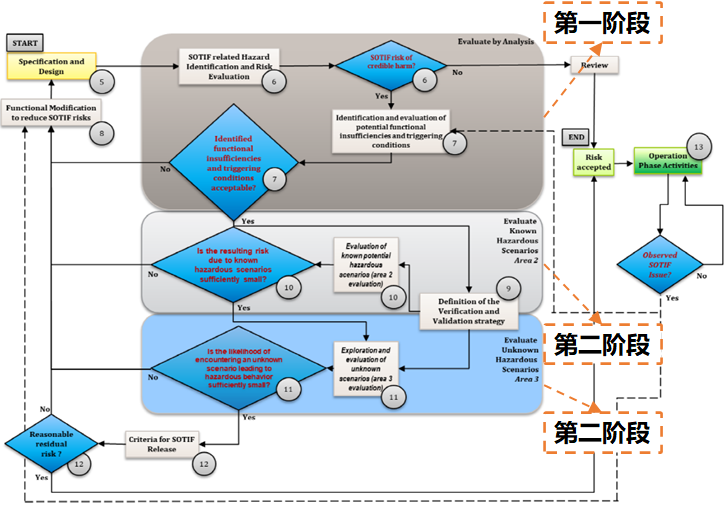
可觀察的視角包括:決策的真實(shí)性(含角色的定義)和規(guī)劃的真實(shí)性(包括Path planning、Maneuver planning、Trajectory planning等)等。 在安全驗(yàn)證的框架下,如何在仿真測(cè)試條件下,綜合地實(shí)現(xiàn)覆蓋、效率、擬真等多維目標(biāo)仍需進(jìn)一步的嘗試和努力。
2299
芝能汽車 ??? 3年前
APDL模擬增材制造-溫度場(chǎng) 
需要相關(guān)命令流和操作加Q:2295356972------------------------------ 介紹:運(yùn)用ANSYS二次開發(fā) APDL語言編輯出參數(shù)化程序來建立模型、控制和劃分網(wǎng)格、 定義材料參數(shù)、施加載荷與邊界條件、分析控制以及求解等完成有限元分析全部過程。
497 2
kukufeng ??? 2年前
增材仿真+生死單元+ansys apdl+熱力耦合+溫度場(chǎng)+應(yīng)力場(chǎng) 
介紹:運(yùn)用ANSYS二次開發(fā) APDL語言編輯出參數(shù)化程序來建立模型、控制和劃分網(wǎng)格、 定義材料參數(shù)、施加載荷與邊界條件、分析控制以及求解等完成有限元分析全部過程。在模擬成型過程中,通過改變溫度載荷的位置來模擬噴嘴的掃描移動(dòng),利用生死單元循環(huán)算法技術(shù)控制單元“生死”的激活來模擬材料的堆積增加,通過控制單元激活的時(shí)間間隔控制成型速度
1077
kukufeng ??? 1年前
焊接+ANSYS APDL+生死單元+熱力耦合 
運(yùn)用ANSYS二次開發(fā) APDL語言編輯出參數(shù)化程序建立焊接模型、控制和劃分網(wǎng)格、 定義材料參數(shù)、施加載荷與邊界條件、分析控制以及求解等完成有限元溫度場(chǎng)應(yīng)力場(chǎng)分析全部過程。利用生死單元循環(huán)算法技術(shù)控制單元“生死”的激活來模擬焊接過程,通過控制單元激活的時(shí)間間隔控制焊接速度,結(jié)合間接熱力耦合原理,對(duì)焊接過程進(jìn)行熱力仿真。
4335
kukufeng ??? 2年前
基于ANSYS的油水分離器優(yōu)化設(shè)計(jì) 
提取目標(biāo)函數(shù)APDL計(jì)算程序如下。
2215
安世亞太 ??? 3年前
自動(dòng)駕駛決策規(guī)劃中的問題與挑戰(zhàn) 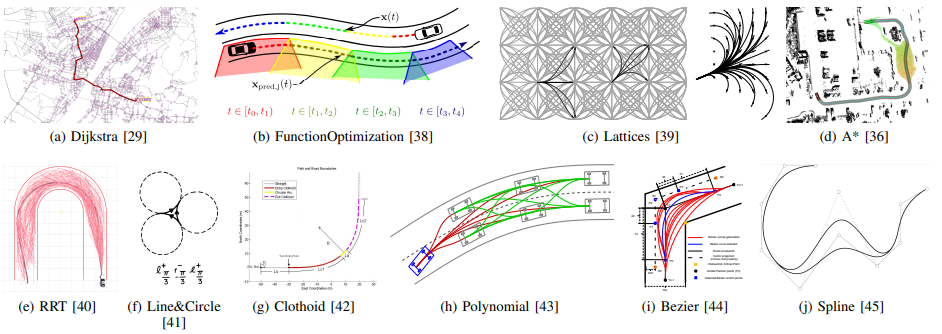
Parking space sampling:對(duì)距離ADC最近的兩個(gè)角點(diǎn)進(jìn)行采樣,將采樣點(diǎn)看作是正態(tài)分布的,根據(jù)采樣角點(diǎn)和設(shè)定的停空間的長(zhǎng)度,計(jì)算ADC后軸中心的停車點(diǎn); Path candidate generation:采用ocp理論對(duì)每個(gè)采樣點(diǎn)進(jìn)行路徑規(guī)劃,其中將時(shí)域問題轉(zhuǎn)化為Ferent坐標(biāo)系下,并使用SQP求解非線性問題; Optimal Path Selection:
2213
駕駛哥 ??? 3年前
自動(dòng)駕駛決策規(guī)劃中的問題與挑戰(zhàn)
Parking space sampling:對(duì)距離ADC最近的兩個(gè)角點(diǎn)進(jìn)行采樣,將采樣點(diǎn)看作是正態(tài)分布的,根據(jù)采樣角點(diǎn)和設(shè)定的停空間的長(zhǎng)度,計(jì)算ADC后軸中心的停車點(diǎn); Path candidate generation:采用ocp理論對(duì)每個(gè)采樣點(diǎn)進(jìn)行路徑規(guī)劃,其中將時(shí)域問題轉(zhuǎn)化為Ferent坐標(biāo)系下,并使用SQP求解非線性問題; Optimal Path Selection:
1994
芝能汽車 ??? 3年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
