



lsdyna曲線定義怎么確定坐標(biāo)?
lsdyna在使用define_curve定義曲線時,怎么確定橫坐標(biāo)和縱坐標(biāo)是哪種物理量,比如我想定義力隨位移變化曲線怎么確定橫坐標(biāo)是位移,縱坐標(biāo)是力值,
2639 5
ゞ99% ??? 1年前
Lsdyna中單元坐標(biāo)?
像Abaqus UMAT子程序中包含COORD參數(shù),即為積分點(diǎn)坐標(biāo),Lsdyna有沒有類似參數(shù)?或者有沒有其他辦法在Lsdyna中獲取積分點(diǎn)坐標(biāo)
1958 2
用戶_29442 ??? 2年前
采用LSDYNA如何進(jìn)行solid單元的復(fù)合材料建模?
采用LSDYNA如何進(jìn)行solid單元的復(fù)合材料建模?
2573 2 4
Owen98 ??? 3年前
Lsdyna前處理用什么軟件建模比較好?
我想建模,Lsdyna前處理用什么軟件建模比較好,方便?
2356 1 2
聽風(fēng)說 ??? 2年前
LSDYNA如何輸出在局部坐標(biāo)系下的應(yīng)力和位移云圖?
已經(jīng)定義了局部坐標(biāo)系,如何在PrePost后處理中查看局部坐標(biāo)系下的位移和應(yīng)力云圖。
5050 4 3
興_6072 ??? 3年前
lsdyna如何輸出局部坐標(biāo)系下的動畫d3plot?
k文件定義了繞全局坐標(biāo)系坐標(biāo)軸的旋轉(zhuǎn),但是輸出的動畫中模型一直在轉(zhuǎn)動,不方便觀察,目前考慮定義一個局部坐標(biāo)系,讓其靜止不動,請問這樣可以實(shí)現(xiàn)嗎?
3324 5 3
興_6072 ??? 3年前
【LSDYNA】汽車撞擊獨(dú)柱式RC墩建模仿真 

【LSDYNA】本案例演示F800汽車防撞柱實(shí)驗(yàn)幾何模型建立、網(wǎng)格劃分和關(guān)鍵字定義;F800汽車撞擊獨(dú)柱式鋼筋混凝土橋墩幾何模型建立、網(wǎng)格劃分和關(guān)鍵字定義。并且給出了詳細(xì)的圖紙和建模文檔。
2689
阿發(fā)的仿真工坊 ??? 1年前
FEMTransfer_仿真分析有限元CAE模型轉(zhuǎn)換工具軟件 
軟件支持坐標(biāo)系類型:直角坐標(biāo)系、圓柱坐標(biāo)系、球坐標(biāo)系。軟件支持載荷和邊界條件:可以轉(zhuǎn)換Shell板單元均布力、beam梁單元均布力、節(jié)點(diǎn)集中力/力矩、慣性力等載荷,也可以轉(zhuǎn)換節(jié)點(diǎn)約束等邊界條件和工況組合設(shè)置。
3259
jnkcsoft ??? 3年前
使用LSDYNA完成仿真之后,如何得到仿真結(jié)果中各個節(jié)點(diǎn)的位置坐標(biāo)?
想用邊界條件先調(diào)整一下一個模型中幾個零件的位置,請問仿真完成后如何用仿真結(jié)果替換掉原來的模型。
2179 4 7
瘋狂的潘達(dá) ??? 4年前
FLAC3D錨桿建模助手 
其中,進(jìn)行地下工程開挖支護(hù)模擬時,需要建立圍巖的噴錨支護(hù)模型,而錨桿的數(shù)量往往較多,且其坐標(biāo)較為不規(guī)則。本文介紹了一款FLAC3D錨桿建模插件AutoCAD插件,能夠自動、大批量地生成FLAC3D 5.0和FLAC3D 6.0軟件內(nèi)的錨桿建模代碼。
4040 2 1
北緯以北 ??? 3年前
多學(xué)科統(tǒng)一的多體動力學(xué)建模方法 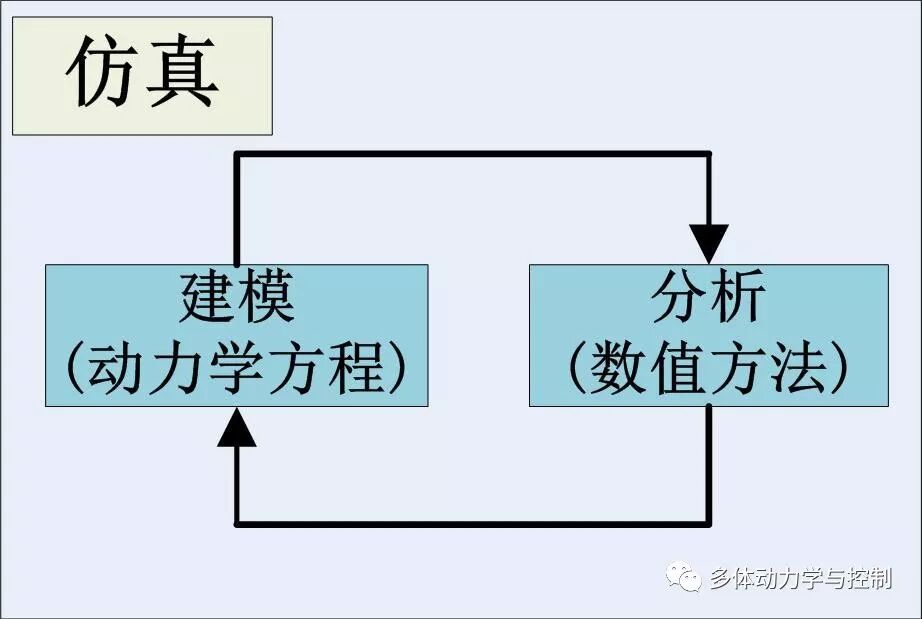
拉格朗日動力學(xué)方程不需要考慮約束力的影響,因?yàn)榧s束力不做功,這樣也簡化了建模,使建模方便。拉格朗日微分代數(shù)方程 對于一個由個系統(tǒng)坐標(biāo)的多學(xué)科動力學(xué)控制系統(tǒng),有個廣義位移坐標(biāo)變量和對應(yīng)的個廣義速度變量,與此同時系統(tǒng)中還存在廣義位移約束和廣義速度約束,廣義速度約束同時包括完整約束和非完整約束。還有作用力約束和動態(tài)約束。
3299 5 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
垂直軸風(fēng)力機(jī)數(shù)值仿真——建模篇SpaceClaim附腳本 
處理時需要注意,網(wǎng)站提供的原始翼型數(shù)據(jù)分上下兩部分,都是從翼型頭部開始至尾緣的,處理時將上半部分的順序翻轉(zhuǎn)一下,從尾緣至頭部,并刪除重復(fù)的(0,0,0)坐標(biāo)。 3.建模過程建模過程包括以下步驟,首先需要讀取翼型坐標(biāo)創(chuàng)建翼型曲線,接下來創(chuàng)建風(fēng)輪與計(jì)算域,最后需要創(chuàng)建實(shí)體模型并刪除不需要的部件。
3737 1
嘆號 ??? 2年前
請問lsdyna前處理用什么軟件建模能夠精度比較高啊?
我看有論文給的模型是這種,曲面看著很平滑,我自己用solidworks建模曲線放大看全是一段段的,這種是怎么做到的啊
2252 3
用戶_48584 ??? 1年前
Lsdyna材料失效準(zhǔn)則?
Lsdyna中的子程序能實(shí)現(xiàn)對節(jié)點(diǎn)初始坐標(biāo)讀取和dt時間坐標(biāo)讀取然后做差,用坐標(biāo)差值作為材料失效準(zhǔn)則嘛
2344 1
用戶_29442 ??? 2年前
(一)自己也能開發(fā)ABAQUS復(fù)合材料層合板自動建模工具? 
材料方向的定義材料方向的定義是層合板建模的核心內(nèi)容。每一層材料都有自己的纖維方向,這個方向通過局部坐標(biāo)系來描述。在ABAQUS中,材料方向通過Orientation命令來定義,需要指定局部坐標(biāo)系的兩個基向量。本方法采用的做法是,根據(jù)用戶給定的鋪層角度,計(jì)算該角度下的局部坐標(biāo)系基向量。第一個基向量沿著纖維方向,其在整體坐標(biāo)系中的分量可以通過角度的三角函數(shù)計(jì)算得到。
3435
靜界有限元 ??? 6月前
lsdyna中動力松弛-螺栓預(yù)緊力加載-soild 
3.模型處理實(shí)體螺栓模型需要將螺栓設(shè)置表面印記,將螺栓的圓柱部分切割出來,建立局部坐標(biāo)系,加載螺栓預(yù)緊力,加載的載荷只能是應(yīng)力值,結(jié)果為預(yù)緊力/截面積4.lsdyna螺栓驗(yàn)證建立螺栓模型,加載預(yù)緊力的應(yīng)力之后,看到結(jié)果中螺栓被分成兩端,并重合擠壓,得到需要的螺栓預(yù)緊力,所以需要考慮設(shè)置中shear and bending5.動力松弛+螺栓預(yù)緊力
2444 1
大龍貓?? ??? 4月前
【LSDYNA操作小技巧七】LSDYNA中具體材料歷史變量的定義與輸出問題 
圖2 完成定義后,完成模型建模輸出為k文件,在LSPP中進(jìn)行損傷云圖的輸出。圖3為定義的損傷在后處理中的查看方式,圖4為輸出的損傷云圖,紅色粒子表示損傷。 圖3 圖4 以上,基于此案例,可在LSDYNA軟件中定義并輸出所給材料的歷史變量。
5645 11 4
程蔚 ??? 3年前
為什么CAD軟件中設(shè)置用戶坐標(biāo)后視圖沒有變化?
許多用戶誤以為坐標(biāo)系調(diào)整會自動同步視圖,忽略了這一關(guān)鍵步驟。在三維建模中,還需注意 VIEWCUBE 組件的狀態(tài),如果系統(tǒng)變量 UCSORTHO 設(shè)置不當(dāng),即使手動切換視圖,VIEWCUBE 也可能無法正確反映當(dāng)前 UCS 狀態(tài)。?顯示緩存和視覺樣式也可能掩蓋 UCS 的變化效果。當(dāng) CAD 處于非線框模式時,UCS 圖標(biāo)可能被隱藏或顯示異常。
2397
自學(xué)土木網(wǎng) ??? 8月前
LSDYNA SPH 2D平面應(yīng)變移動無限水流沖擊土壤 
LSDYNA SPH 2D平面應(yīng)變移動無線水流沖擊土壤。本視頻教程給包含以下內(nèi)容:完整土壤、水流SPH建模過程;移動水流與無限水流設(shè)置方法;應(yīng)力應(yīng)變云圖、損傷云圖查看。效果圖如下
附件為k文件。請用LSDYNA R13及以上版本,雙精度計(jì)算。
1868 7
III天涯III ??? 2年前
三坐標(biāo)測量如何實(shí)現(xiàn)微米級精度?核心算法全解析 
智能避讓路徑(如圓弧避撞)的核心在于精準(zhǔn)的數(shù)學(xué)建模與空間解析: 1.碰撞體素化建模 將測頭、加長桿、工件、夾具等關(guān)鍵實(shí)體在測量空間內(nèi)進(jìn)行離散化表達(dá),構(gòu)建其運(yùn)動包絡(luò)體的數(shù)學(xué)邊界模型,這是三坐標(biāo)測量機(jī)(CMM)實(shí)現(xiàn)智能避撞的核心基礎(chǔ)。 體素化建模的本質(zhì)是:用空間網(wǎng)格的“占位符”替代復(fù)雜幾何體,將碰撞問題轉(zhuǎn)化為高效的網(wǎng)格狀態(tài)查詢。
2488
深圳市中圖儀器股份有限公司 ??? 9月前
20條/頁 
 43
43 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
