



超聲波在無人機(jī)避障系統(tǒng)的應(yīng)用 
世界上主要的消費(fèi)級(jí)、商業(yè)級(jí)無人機(jī)制造商都開始將“避障系統(tǒng)”(ObstacleAvoidance)當(dāng)做產(chǎn)品重點(diǎn)來提。下面工采網(wǎng)小編和大家一起看看無人機(jī)如何避障? 無人機(jī)要實(shí)現(xiàn)低空尤其是近地面的自主飛行,除了要知道無人機(jī)當(dāng)前的海拔高度外,還需知道無人機(jī)相對(duì)于地面的高度。
2304
工采網(wǎng) ??? 3年前
利用UM0090收發(fā)一體式超聲波避障傳感器模組實(shí)現(xiàn)無人機(jī)高度精確測量 
無人機(jī)是利用無線電遙控設(shè)備和自備的程序控制裝置操作的不載人飛機(jī)。在無人機(jī)飛出用戶視野范圍時(shí),為了精準(zhǔn)地控制無人機(jī),需要準(zhǔn)確地測量無人機(jī)飛行的高度、飛行速度、以及位置等信息。下面工采網(wǎng)小編和大家一起看看利用UM0090收發(fā)一體式超聲波避障傳感器模組實(shí)現(xiàn)無人機(jī)高度精確測量。
2120
工采網(wǎng) ??? 3年前
面向6G的無人機(jī)通信綜述 
因此,該文針對(duì)全域覆蓋、場景智聯(lián)、信息耦合的6G網(wǎng)絡(luò)中無人機(jī)(UAVs)的應(yīng)用場景進(jìn)行了綜述。首先,針對(duì)無人機(jī)在空天地海一體化網(wǎng)絡(luò)架構(gòu)中的應(yīng)用進(jìn)行了陳述,重點(diǎn)討論了無人機(jī)在不同場景中可能承擔(dān)的角色及功能,如蜂群基站、全息投影部署、遠(yuǎn)距離中繼通信以及數(shù)據(jù)采集等。
2774
無人機(jī)10086 ??? 3年前
4大技術(shù)亮點(diǎn)支撐應(yīng)用優(yōu)勢 全新一代旗艦型行業(yè)無人機(jī)千巡翼X4發(fā)布 
3、 “ 視覺避障 + 毫米波雷達(dá) ”晝夜融合避障安全領(lǐng)域一直是行業(yè)無人機(jī)研發(fā)所關(guān)注的重要方向。隨著激光雷達(dá)、紅外載荷應(yīng)用的普及,無人機(jī)夜航任務(wù)逐漸增多,夜間如何保障飛行安全是擺在無人機(jī)從業(yè)者面前的重要課題。千巡翼X4就更好的解決了這一點(diǎn)。在避障方向上,千巡翼X4機(jī)身六個(gè)方向上均布設(shè)有避障傳感器,能夠?qū)崿F(xiàn)720°全方位避障。
2138
千尋位置行業(yè)應(yīng)用 ??? 3年前
無人機(jī)的反制綜述 
反無人機(jī)技術(shù)按照功能大致可以分為兩大類:一是 無人機(jī)探測技術(shù),二是 無人機(jī)反制技術(shù)。 無人機(jī)探測技術(shù) 首先我們來說說無人機(jī)探測技術(shù)。 無人機(jī)探測技術(shù)是綜合利用各種傳感器來“發(fā)現(xiàn)”或“找到”威脅目標(biāo),利用目標(biāo)無人機(jī)的物理屬性( 如光學(xué)特性、熱學(xué)特性、聲學(xué)特性、磁學(xué)特性) 的不同,通過上述某些特性的測量來找到目標(biāo)無人機(jī)并進(jìn)行識(shí)別。
4905 3 1
無人機(jī)圈 ??? 2年前
尋找無人機(jī)飛控算法、應(yīng)用開發(fā)方面專家或?qū)I(yè)人員
<p><span style="color: rgb(34, 34, 38); background-color: rgb(255, 255, 255);">尋找無人機(jī)飛控算法、應(yīng)用開發(fā)方面專家或?qū)I(yè)人員,共同探討將現(xiàn)有開發(fā)平臺(tái)通用芯片轉(zhuǎn)化成基于飛控算法專用芯片的可能。探討內(nèi)容不僅限于數(shù)據(jù)存儲(chǔ)、外部通訊、驅(qū)動(dòng)程序、飛行控制、消息總線等。有興趣者可私信聯(lián)系。</span></p>
1663
用戶_47284 ??? 1年前
208基于matlab的多目標(biāo)遺傳算法的無人機(jī)航路規(guī)劃 
基于matlab的多目標(biāo)遺傳算法的無人機(jī)航路規(guī)劃。在三維航路中進(jìn)行航路代價(jià)估計(jì),綜合考慮路徑長度、隱蔽性、危險(xiǎn)度,規(guī)劃出最優(yōu)路徑。輸出3D規(guī)劃路徑。程序已調(diào)通,可直接運(yùn)行。
2301
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
有線無人機(jī)在鍋爐防磨防爆檢查中的應(yīng)用 
4.4 無人機(jī)在鍋爐中避障 采用激光雷達(dá)和防護(hù)罩形式實(shí)現(xiàn)雙重避障,在離障礙物2米距離時(shí)無人機(jī)懸停實(shí)現(xiàn)自主避障功能;在一些需要近距離檢查的場合,通過防護(hù)罩可防止與爐壁碰撞。
3161
無人機(jī)10086 ??? 4年前
知語云:低慢小無人機(jī)管制反制監(jiān)測 探測偵測方式方法? 
這一技術(shù)類似于蝙蝠等生物在飛行時(shí)的目標(biāo)探測原理,目前多用于無人機(jī)避障。3)圖像與雷達(dá)的信息融合。這兩者的融合模式,是雷達(dá)進(jìn)行大范圍地掃描搜索,發(fā)現(xiàn)目標(biāo)后,運(yùn)用了相機(jī)對(duì)目標(biāo)成像。這樣是可以在獲得探測距離的同時(shí),不失探測精度。其中的關(guān)鍵技術(shù)是雷達(dá)的目標(biāo)探測與識(shí)別及其與相機(jī)之間快速、穩(wěn)定的響應(yīng)關(guān)系。4)圖像與聲音融合。聲陣列中對(duì)無人機(jī)的探測在五百米范圍內(nèi)有良好效果。
4644 8 2
用戶_34138 ??? 2年前
反無人機(jī)技術(shù)再突破?無線電協(xié)議破解可以“接管”無人機(jī)嗎? 
筆者查閱相關(guān)資料感到,目前加密非常復(fù)雜,就無人機(jī)用戶層加密涉及RC4、DES、AES、CRC等方式,若聯(lián)系物理層相關(guān)加密技術(shù),破解難度將非常大。當(dāng)然,不同的算法有各自的優(yōu)缺點(diǎn),理論上具有破解的可能。但在實(shí)際應(yīng)用過程中,破解無人機(jī)操控協(xié)議難度是非常大的。比如DES加密,該算法是迄今為止最典型的對(duì)稱加密算法,在很多領(lǐng)域都有著廣泛的運(yùn)用,是分組密碼的代表之一,算法是對(duì)稱密碼的一種。
2787
無人機(jī)10086 ??? 4年前
淺析無人機(jī)仿真技術(shù) 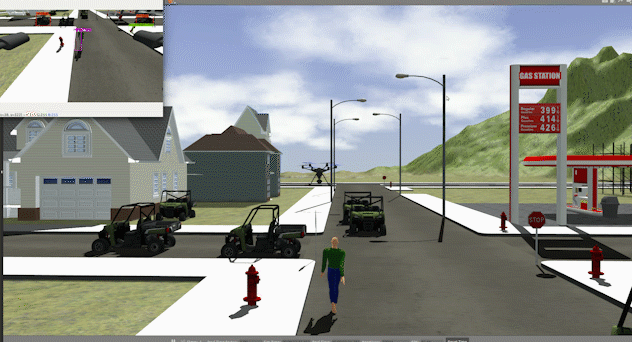
對(duì)于像無人機(jī)飛控系統(tǒng)這樣對(duì)實(shí)時(shí)性要求非常高的對(duì)象而言,能否達(dá)到控制效果是個(gè)問題。在這樣的平臺(tái)上進(jìn)行實(shí)時(shí)仿真試驗(yàn),如果試驗(yàn)效果不太理想,很難說明到底是因?yàn)?em>算法結(jié)構(gòu)或參數(shù)設(shè)計(jì)不當(dāng)?shù)脑颍€是因?yàn)樵撈脚_(tái)實(shí)時(shí)性達(dá)不到要求的原因。
4687
無人機(jī)圈 ??? 2年前
激光測距傳感器在室內(nèi)無人機(jī)定位追蹤中的應(yīng)用 
基于此無人機(jī)目標(biāo)識(shí)別與跟蹤技術(shù)的基本原理通過無人機(jī)搭載的攝像頭或其他傳感器設(shè)備,采集環(huán)境信息,然后通過算法分析這些信息,識(shí)別出目標(biāo)物體并將其位置、形狀等信息進(jìn)行精確跟蹤。這一過程涉及到圖像處理、模式識(shí)別、計(jì)算機(jī)視覺等多個(gè)領(lǐng)域的知識(shí)。 為了無人機(jī)可以準(zhǔn)確感知周圍環(huán)境的三維結(jié)構(gòu),實(shí)現(xiàn)自主避障和精準(zhǔn)定位,大大提升無人機(jī)的安全性和定位精度??刹捎眉す鉁y距傳感器。
2287
摩天射頻 ??? 1年前
無人機(jī)集群如何從理論“飛進(jìn)”現(xiàn)實(shí) 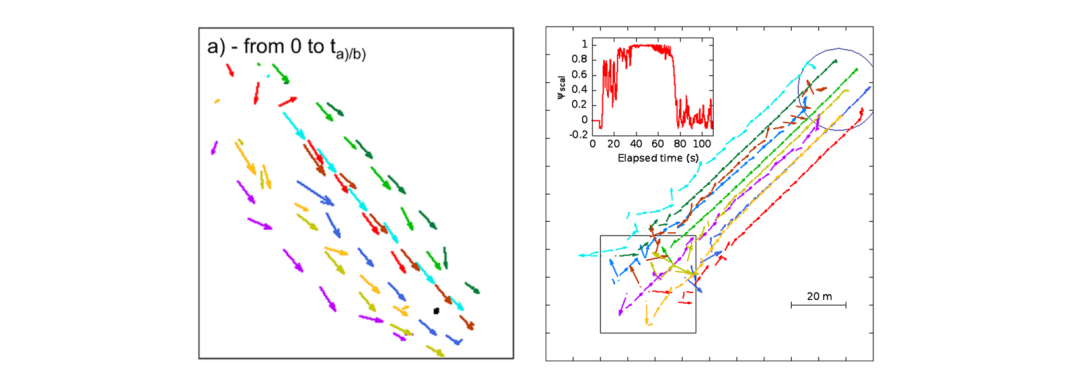
隨著科技進(jìn)步及日益增長的應(yīng)用需求,近年來無人機(jī)呈現(xiàn)井噴式發(fā)展。由于傳統(tǒng)單機(jī)作業(yè)的局限性,無人機(jī)集群受到了越來越多的關(guān)注,研究人員開始探索如何讓無人機(jī)集群像自然界生物群體一樣高效自主的完成特定任務(wù),從而設(shè)計(jì)出各式各樣的集群算法。
2501
看航空 ??? 3年前
無人機(jī)導(dǎo)航定位系統(tǒng)關(guān)鍵技術(shù)研究 
定位延遲和定位誤差不僅不能實(shí)現(xiàn)無人機(jī)的自主定位功能,還會(huì)大大降低無人機(jī)的安全性。定位精度也是無人機(jī)自主定位算法的關(guān)鍵問題。目前無人機(jī)的視覺圖像處理是基于像素的,圖像質(zhì)量的好壞將直接影響圖像特征點(diǎn)的代表性和準(zhǔn)確性。圖像處理和計(jì)算也是算法中最耗時(shí)的部分。 視覺導(dǎo)航技術(shù)是指利用計(jì)算機(jī)視覺技術(shù)對(duì)無人機(jī)航拍圖像進(jìn)行處理和分析,根據(jù)視覺定位算法可以估計(jì)無人機(jī)的當(dāng)前位置。
2324
無人機(jī)圈 ??? 4年前
通過 CFD 仿真延長四旋翼無人機(jī)的飛行時(shí)間和范圍 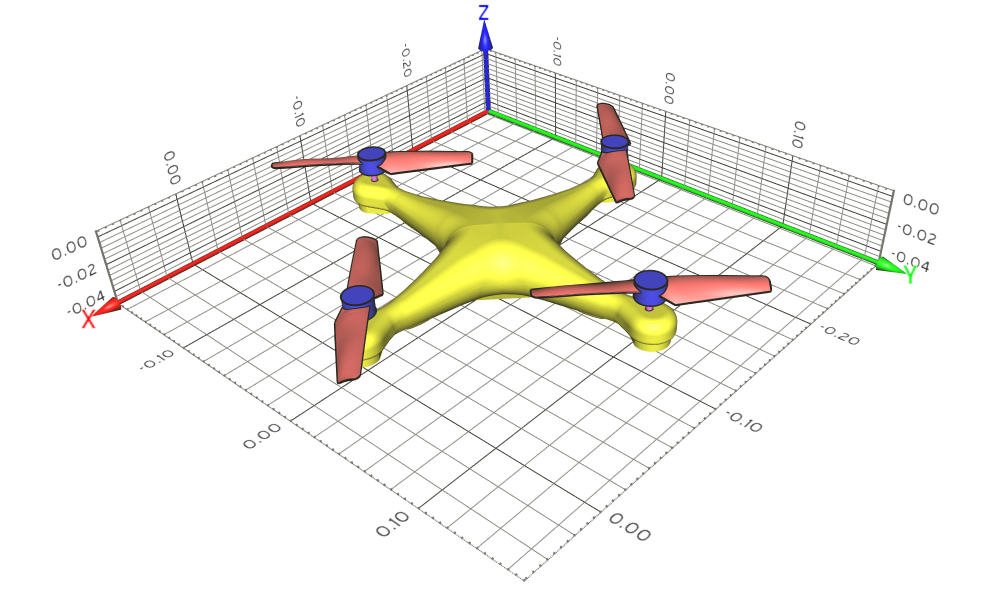
無人機(jī)手臂使用三個(gè)變形向量進(jìn)行參數(shù)化,這可以通過變形優(yōu)化無人機(jī)的形狀,同時(shí)還滿足為確保可行設(shè)計(jì)而應(yīng)用的多個(gè)約束。Cadence 的優(yōu)化例程基于無梯度算法,對(duì)于復(fù)雜的多組件系統(tǒng)(例如無人機(jī)),該算法比基于梯度的優(yōu)化更有效。由于內(nèi)置代理模型或人工神經(jīng)網(wǎng)絡(luò),所采用的優(yōu)化過程受益于巨大的加速?;A(chǔ)進(jìn)化和遺傳算法確保根據(jù)定義的目標(biāo)(例如飛行時(shí)間最大化)提供最佳收斂解決方案。
3159 4 2
Cadence CFD學(xué)習(xí) ??? 3年前
一種小型固定翼無人機(jī)彈射系統(tǒng)的設(shè)計(jì) 
中程固定翼無人機(jī)發(fā)展綜述及總體設(shè)計(jì)技術(shù)研究[C]// 2019年(第四屆)中國航空科學(xué)技術(shù)大會(huì). 0.</p><p>[2] 魏志強(qiáng), 劉馨澤. 飛機(jī)起飛過程的加速特性分析與軌跡仿真[J]. 飛行力學(xué), 2019, 037(004):17-20.</p><p>[3] 張程皓. 小型多旋翼無人機(jī)航拍的新探索[D]. 2019.
4407 3
力學(xué)AI有限元 ??? 1年前
光伏巡檢3.0時(shí)代,無人機(jī)還可以做什么? 
場站建模與ID組串分割 星邏馭光作為一款獨(dú)立軟件,實(shí)現(xiàn)了與無人機(jī)機(jī)庫解耦,無人機(jī)可承載軟件進(jìn)行日常巡檢 ,工作人員通過Web/Pad多種形式可視化調(diào)度及管理終端進(jìn)行多航線任務(wù)規(guī)劃,實(shí)現(xiàn)無人機(jī)的一鍵起飛和遠(yuǎn)程調(diào)度,無人機(jī)可實(shí)現(xiàn)自動(dòng)飛行、自主避障、斷電續(xù)飛、5G聯(lián)網(wǎng)等功能,無需現(xiàn)場操作即可知悉光伏電站狀態(tài),效率相比于人力提升10倍
2339
無人機(jī)10086 ??? 4年前
無人潛水艇的設(shè)計(jì)與仿真 
一方面需要成熟的路徑規(guī)劃算法,靈巧的操作和避障能力,可以按照既定的路線自主航行躲避障礙,另一方面需要遠(yuǎn)距離水下數(shù)據(jù)采集和通訊能力,確保作業(yè)任務(wù)的質(zhì)量。 在這一領(lǐng)域,借助 MATLAB 和 Simulink 強(qiáng)大的物理建模和仿真能力,可以為您的船舶設(shè)計(jì),系統(tǒng)設(shè)計(jì)和人工智能開發(fā)大幅提高效率。
3907 4 2
海工 ??? 4年前
無人機(jī)集群自組織搜索仿真模型設(shè)計(jì)與實(shí)現(xiàn) 
在集群搜索問題上[2-3],已有很多搜索算法。本文聚焦無人機(jī)集群自組織搜索城市威脅環(huán)境中移動(dòng)的目標(biāo)進(jìn)行研究。無人機(jī)集群自組織搜索,是指將多架成本低廉、小型輕便、功能相對(duì)簡單和具有一定自主能力的低成本無人機(jī)以集群的方式大量部署,基于一定的間隔分布,形成一定的覆蓋范圍,按照上一層次的指揮要求,在操控人員監(jiān)控下,在任務(wù)區(qū)域上空按照選定的策略飛行,實(shí)現(xiàn)對(duì)目標(biāo)的搜索、發(fā)現(xiàn)、識(shí)別和跟蹤鎖定。
2064 1
龍騰AI技術(shù) ??? 3年前
XL5300 近距離測距模塊介紹 
應(yīng)用? 激光檢測自動(dòng)對(duì)焦(LDAF)? 接近感應(yīng)? 避障與防撞? 1D 手勢識(shí)別? 低功耗系統(tǒng)運(yùn)行時(shí)的物體檢測? 智能手機(jī)/平板? 車載導(dǎo)航等領(lǐng)域? 臺(tái)燈? 攝像頭快速聚焦輔助? 人員經(jīng)過、闖入檢測? 無人機(jī)定高、避障
620
芯嶺技術(shù)77 ??? 1月前
20條/頁 
 14
14 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
