



SYNOPSYS? 每月一題(第六期)線上研討會(huì):車(chē)載環(huán)視鏡頭 

① 車(chē)載高清環(huán)視攝像頭應(yīng)用;② 圖像傳感器;③ 光學(xué)特征;④ 補(bǔ)充要求。
144 2
墨光科技 ??? 4年前
一文淺析ADAS攝像頭分類(lèi)與功能 
圖 環(huán)視影像監(jiān)控系統(tǒng)原理圖圖 日產(chǎn)2007年發(fā)布的Infiniti EX35汽車(chē)上的環(huán)視攝像頭圖 大陸集團(tuán)的2019年推出的一款前視+360度可視的多攝像頭集成系統(tǒng)現(xiàn)階段,前視與環(huán)視是最廣泛的攝像頭應(yīng)用。側(cè)視攝像頭安裝位置:左右后視鏡處或下方車(chē)身處側(cè)視攝像頭主要是用于盲點(diǎn)監(jiān)測(cè)BSD,根據(jù)安裝位置可以實(shí)現(xiàn)前視或后視作用。
2433
木火柴 ??? 4年前
一文讀懂汽車(chē)芯片--圖像傳感器芯片及車(chē)規(guī)AEC-Q100認(rèn)證 
技術(shù)參數(shù):· 分辨率:最高可達(dá)8MP像素水平,一般以2MP像素或者1MP像素等水平;· 高動(dòng)態(tài)范圍HDR:一般需要達(dá)到120dB水平,最高至140dB;· 具備LED燈閃爍抑制功能;· 具備ISO 26262功能安全等;(2)環(huán)視影像類(lèi)應(yīng)用CIS環(huán)視影像類(lèi)應(yīng)用CIS主要安裝在前后車(chē)標(biāo)附近,以及集成于左右后視鏡,安裝數(shù)量為4個(gè),可用于實(shí)現(xiàn)360°全景環(huán)視系統(tǒng)以及作為自動(dòng)泊車(chē)的基礎(chǔ)等。
2745
falab ??? 2年前
賦能商用車(chē) ADAS 研發(fā):多傳感器數(shù)據(jù)采集方案 
(1)必選配置:含環(huán)視多相機(jī)、主 LiDAR、360° 毫米波雷達(dá)及雙天線 GNSS + 底盤(pán) IMU,滿(mǎn)足基礎(chǔ)感知與定位;(2)強(qiáng)化配置:增設(shè)盲區(qū)近場(chǎng) LiDAR、4D 毫米波雷達(dá),提升融合能力與抗干擾性;(3)可選配置:在駕駛室增設(shè)第二 IMU,實(shí)現(xiàn)艙上傳感器運(yùn)動(dòng)補(bǔ)償與標(biāo)定保持。
2084
康謀keymotek ??? 2月前
高逼真合成數(shù)據(jù)助力智駕“看得更準(zhǔn)、學(xué)得更快” 
二、 AVM系統(tǒng)開(kāi)發(fā)中的仿真驗(yàn)證應(yīng)用環(huán)視系統(tǒng)(AVM, Around View Monitor)是自動(dòng)駕駛和高級(jí)輔助駕駛系統(tǒng)(ADAS)中常見(jiàn)的功能模塊,通常由4個(gè)或更多廣角魚(yú)眼相機(jī)構(gòu)成,通過(guò)拼接多個(gè)攝像頭圖像生成車(chē)輛周?chē)?60°的鳥(niǎo)瞰圖。自動(dòng)泊車(chē)系統(tǒng)(APA)需要環(huán)視圖像提供對(duì)車(chē)輛周?chē)h(huán)境的精準(zhǔn)感知。
2507
康謀keymotek ??? 12月前
CINNO Research | 2025年國(guó)內(nèi)乘用車(chē)攝像頭搭載量將超1億顆,CAGR 17% 
環(huán)視攝像頭季度搭載量趨勢(shì)預(yù)測(cè)5.
2037
CINNO ??? 3年前
方案分享 | AVM合成數(shù)據(jù)仿真驗(yàn)證方案 
圖3:環(huán)視OpenCV魚(yú)眼相機(jī)傳感器配置除了傳感器的配置,考慮到腳本是通過(guò)選取地面點(diǎn),求解相機(jī)到地面的投影矩陣,并轉(zhuǎn)換生成BEV視圖進(jìn)行組合,所以還需要構(gòu)建一張?zhí)卣髅黠@、易于辨認(rèn)標(biāo)定效果的地圖。
2645
康謀keymotek ??? 1年前
康謀方案 | 高精LiDAR+神經(jīng)渲染3DGS的完美融合實(shí)踐 
環(huán)視系統(tǒng)自動(dòng)標(biāo)注(4)神經(jīng)網(wǎng)絡(luò)訓(xùn)練: 使用NeRF/3DGS算法生成高精度三維場(chǎng)景。(5)仿真部署與增強(qiáng): 在aiSim仿真平臺(tái)中集成重建場(chǎng)景,配置不同環(huán)境(暴雨、夜晚、雪天)、多模態(tài)傳感器(攝像頭、LiDAR、毫米波雷達(dá)等)與虛擬交通流。
2439
康謀keymotek ??? 11月前
VirtualLab Unity應(yīng)用:廣角魚(yú)眼鏡頭 
案例說(shuō)明 廣角魚(yú)眼鏡頭在全景監(jiān)控、虛擬現(xiàn)實(shí)、無(wú)人機(jī)環(huán)視、車(chē)載輔助駕駛和科學(xué)觀測(cè)等超大視場(chǎng)成像領(lǐng)域得到廣泛應(yīng)用。該類(lèi)鏡頭通過(guò)極短焦距與特殊投影設(shè)計(jì),可實(shí)現(xiàn)接近或超過(guò)180°的寬視場(chǎng)成像。
991
追光ing ??? 4月前
萬(wàn)字綜述車(chē)載攝像頭 
環(huán)視攝像頭:主要安裝在車(chē)身四周,一般使用 4 - 8 個(gè)攝像頭,可分為前向魚(yú)眼攝像頭/左側(cè)魚(yú)眼攝像頭/右側(cè)魚(yú)眼攝像頭/后向魚(yú)眼攝像頭。用于全景環(huán)視功能的顯示,以及融合泊車(chē)功能的視覺(jué)感知及目標(biāo)檢測(cè);常用色彩矩陣為 RGGB,因?yàn)橛猩蔬€原的需求。 后視攝像頭:一般安裝在后備箱上,主要是實(shí)現(xiàn)泊車(chē)輔助。
2430 1
木火柴 ??? 4年前
VirtualLab Unity應(yīng)用:廣角魚(yú)眼鏡頭 
應(yīng)用場(chǎng)景 廣角魚(yú)眼鏡頭在全景監(jiān)控、虛擬現(xiàn)實(shí)、無(wú)人機(jī)環(huán)視、車(chē)載輔助駕駛和科學(xué)觀測(cè)等超大視場(chǎng)成像領(lǐng)域得到廣泛應(yīng)用。該類(lèi)鏡頭通過(guò)極短焦距與特殊投影設(shè)計(jì),可實(shí)現(xiàn)接近或超過(guò)180°的寬視場(chǎng)成像。魚(yú)眼鏡頭通常采用多組非球面或自由曲面透鏡,以校正大視角下的像差并控制畸變;在需要時(shí)還可引入衍射光學(xué)元件(DOE)以提升成像質(zhì)量并減輕結(jié)構(gòu)重量。
1037
信光嗎 ??? 4月前
禾賽科技第三季度營(yíng)收 4.5 億元同比增長(zhǎng) 33.5%,激光雷達(dá)交付 47440 臺(tái) 
環(huán)視攝像頭季度搭載量趨勢(shì)預(yù)測(cè) 5.
2240
IC_Research ??? 2年前
2萬(wàn)字帶你厘清自動(dòng)駕駛功能架構(gòu)的演進(jìn) 
這并不是真正意義的前融合算法,在行泊一體的上半場(chǎng)硬件比拼中,大家不分高下,下半場(chǎng)就要拼軟件算法了,尤其是對(duì)環(huán)視攝像頭和側(cè)視攝像頭數(shù)據(jù)的融合算法和目標(biāo)軌跡預(yù)測(cè)算法。
3539
駕駛哥 ??? 3年前
車(chē)載攝像頭CAM 
產(chǎn)品種類(lèi) ADAS攝像頭1-box/2-box系列 DMS/OMS攝像頭系列 環(huán)視、后視和流媒體攝像頭系列(規(guī)劃中) 產(chǎn)品優(yōu)勢(shì) 具備成熟的攝像頭模組開(kāi)發(fā)經(jīng)驗(yàn)以及控制系統(tǒng)集成能力 專(zhuān)業(yè)的整車(chē)布置支持團(tuán)隊(duì),滿(mǎn)足乘用車(chē)和商用車(chē)使用和安裝需求 滿(mǎn)足車(chē)規(guī)級(jí)設(shè)計(jì)及器件,整車(chē)電器、EMC、材料、耐久等要求 成熟的汽車(chē)電子配套經(jīng)驗(yàn)
2017
經(jīng)緯恒潤(rùn) ??? 2年前
經(jīng)緯恒潤(rùn)全面布局車(chē)載攝像頭,打造智駕、座艙新生態(tài) 
其中,智能駕駛類(lèi)主要包括前視、側(cè)視、后視、環(huán)視攝像頭;智能座艙類(lèi)主要包括駕駛員監(jiān)控?cái)z像頭、座艙監(jiān)控?cái)z像頭。同時(shí),攝像頭搭配有先進(jìn)的ISP圖像處理算法,經(jīng)緯恒潤(rùn)根據(jù)車(chē)輛布置空間及使用環(huán)境的特殊要求,為客戶(hù)提供定制化畫(huà)質(zhì)調(diào)優(yōu)服務(wù),確保每一款攝像頭都能以更完美的性能應(yīng)對(duì)各種復(fù)雜應(yīng)用場(chǎng)景。
2416 1
經(jīng)緯恒潤(rùn) ??? 3年前
高階整車(chē)域控制器的詳細(xì)設(shè)計(jì)方案 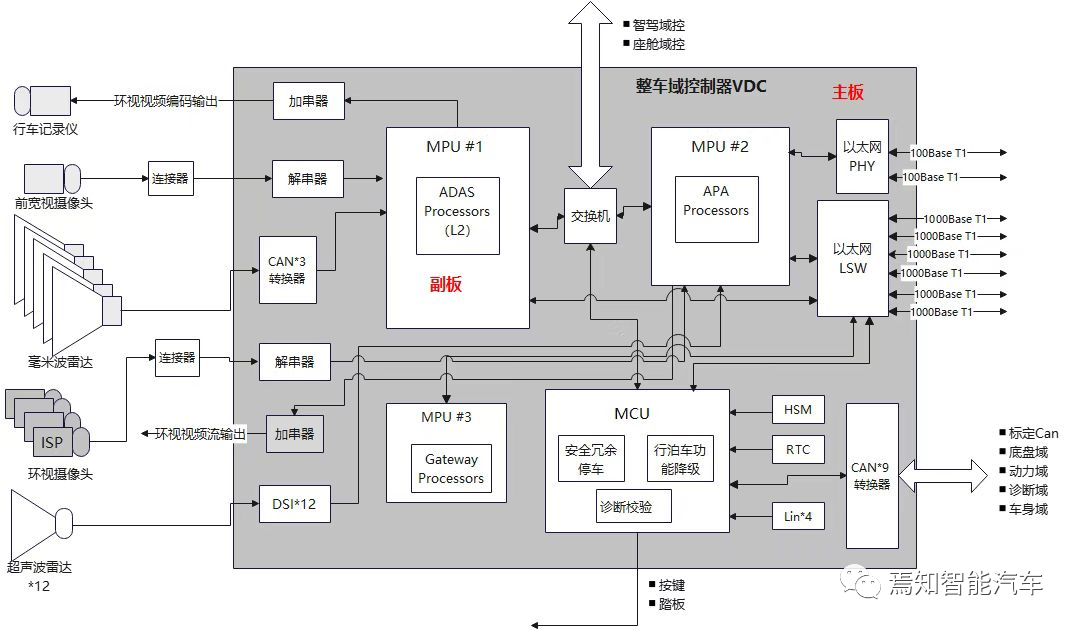
此外,考慮泊車(chē)輔助系統(tǒng)控制,整個(gè)VDC也需要將泊車(chē)相關(guān)的傳感器,環(huán)視+超聲波接入。當(dāng)然,考慮到如果只是實(shí)現(xiàn)低階泊車(chē)輔助功能,其環(huán)視攝像頭的分辨率可以不必向高階全自動(dòng)駕駛功能對(duì)齊,采用稍低分辨率也可。文章來(lái)源焉知智能汽車(chē)
2256
汽車(chē)公社 ??? 3年前
康謀技術(shù) | 自動(dòng)駕駛傳感器標(biāo)定技術(shù):從單一到聯(lián)合標(biāo)定 
圖片來(lái)源于網(wǎng)絡(luò)②LiDAR與LiDAR標(biāo)定(環(huán)視標(biāo)定)通過(guò)多個(gè)激光雷達(dá)之間的相對(duì)位置和方向的標(biāo)定。這種標(biāo)定對(duì)于多激光雷達(dá)系統(tǒng),特別是在需要360度環(huán)境感知的自動(dòng)駕駛車(chē)輛中非常重要。 圖片來(lái)源于網(wǎng)絡(luò)③LiDAR與Radar標(biāo)定通過(guò)激光雷達(dá)與毫米波雷達(dá)之間的相對(duì)位置和方向進(jìn)行標(biāo)定。
2256
康謀keymotek ??? 1年前
限時(shí)福利丨SYNOPSYS? 案例視頻免費(fèi)領(lǐng)取! 
—監(jiān)控鏡頭設(shè)計(jì)13SYNOPSYS? 每月一題2——長(zhǎng)波非制冷雙視場(chǎng)鏡頭設(shè)計(jì)14SYNOPSYS? 每月一題3——工業(yè)遠(yuǎn)心標(biāo)準(zhǔn)鏡頭設(shè)計(jì)15SYNOPSYS? 每月一題4——手機(jī)鏡頭初始結(jié)構(gòu)自動(dòng)設(shè)計(jì)16SYNOPSYS? 每月一題5——FP 測(cè)風(fēng)儀光學(xué)系統(tǒng)設(shè)計(jì)17SYNOPSYS? 每月一題6——車(chē)載環(huán)視鏡頭
2129 1
墨光科技 ??? 2年前
AMD在汽車(chē)領(lǐng)域能翻起多少風(fēng)浪來(lái)? 
▲圖3.Subaru Eyesight系統(tǒng)中使用的多處理器SoC FPGA Xilinx是處理環(huán)視攝像頭數(shù)據(jù)的最主要芯片供應(yīng)商,包括博世和麥格納的產(chǎn)品,已經(jīng)投產(chǎn)。其他幾家大型Tier 1將在明年投產(chǎn)。 由于自由度比較高,賽靈思在新興4D成像雷達(dá)的處理器中占主導(dǎo)地位(在小規(guī)模的創(chuàng)新市場(chǎng)占到了85%-90%),這塊的主要競(jìng)爭(zhēng)對(duì)手是NXP。
2118
芝能汽車(chē) ??? 4年前
一文了解面向無(wú)人駕駛感知系統(tǒng)的仿真驗(yàn)證技術(shù) 
基于物理的攝像頭模型支持標(biāo)準(zhǔn)鏡頭、魚(yú)眼鏡頭和環(huán)視多攝像頭的仿真,通過(guò)對(duì)鏡頭模型、圖像傳感器模型、處理器模型、風(fēng)擋參數(shù)等五十多個(gè)物理參數(shù)的設(shè)置,可以表現(xiàn)出攝像頭成像中如過(guò)曝、噪點(diǎn)、畸變、色散等一系列物理現(xiàn)象,實(shí)現(xiàn)原始圖像數(shù)據(jù)輸出。
2606 2 1
Ansys中國(guó) ??? 4年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
