



無人機導航定位系統關鍵技術研究 
為了解決這個問題,人們還提出加攝像頭生成雙目SLAM,或者加IMU生成耦合視覺慣性導航定位系統。初始粒子的位置可以通過視覺測量算法測量的運動變化來跟蹤,而不是在沒有測量的情況下隨機移動它們。使用視覺測量算法可以減少粒子集生成過程的搜索空間。
2324
無人機圈 ??? 4年前
一分鐘,帶你了解虛擬現實(VR)的原理 
因為人眼天然擁有以上這些視覺差異和變焦功能,你眼前的這個場景,才能在大腦的加工后變得立體和縱深;人眼這么復雜的視覺體驗,虛擬現實是怎么模仿出來的呢? 我們來做一個實驗:如果把相機放在一個點上,拍攝廣場上一遠一近的兩個人。那么當鏡頭對焦在不同的人身上時,就能拍到2張只有一個人清晰,而其他部分虛化的照片。
2466
非標機械論壇 ??? 4年前
干貨|自動駕駛系統中感知傳感器實物仿真測試環境構建 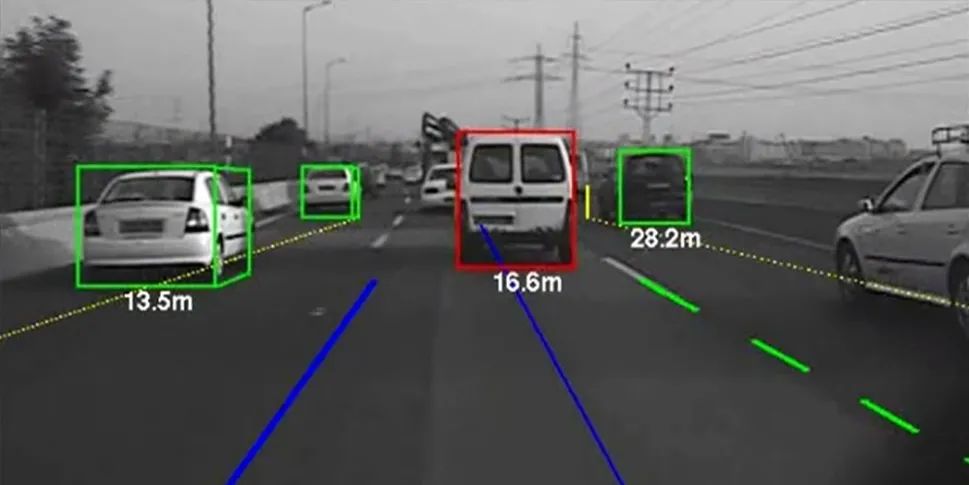
圖3 視覺攝像頭黑箱結構示意圖 目前自動駕駛系統中應用的攝像頭有兩種類型,單目攝像頭和雙目攝像頭,后者因為提供了復數的攝像頭視點,虛擬目標需能夠模擬出視角偏差效果,所以目前上述兩者方案暫不能支持雙目攝像頭的目標模擬。■ 核心傳感器①:毫米波雷達的功能?構造?應用 自動駕駛技術中另一個廣泛使用的傳感器就是毫米波雷達。
4045
EDC電驅未來 ??? 2年前
Wabtec原奧林巴斯工業內窺鏡解決方案 
* 防油與畸變校正:特殊物鏡設計配合算法,實時校正魚眼畸變并自動排油,提供真實視覺反饋。 三維測量與建模 基于立體視覺原理,高端內窺鏡具備了精密測量能力。 * 超廣角立體測量:擴展了測量的視場角,使得在大空間內也能進行精準測量。
895
用戶_159024 ??? 29天前
從“工業之眼”到“智能平臺”:Evident原奧林巴斯便攜式工業內窺鏡的技術重構 
三維測量與建模 基于立體視覺原理,高端內窺鏡具備了精密測量能力,通過雙物鏡或結構光技術,設備可計算缺陷的長度、深度及面積,特別是3D輔助建模技術(如3DAssist),利用單光路輸入即可生成高保真3D模型,突破了傳統雙目立體成像的硬件限制,為缺陷分析提供了直觀的三維數據支持。
806
用戶_159024 ??? 6天前
AR關鍵技術及其在航天航空領域中的應用 
光場技術原理:在計算機圖形學領域,3D渲染演示技術的演化進程可以大致劃分成針孔相機、雙目立體視覺、光場、數字全息四個階段。光子光場芯片是光場顯示最核心的部分,光子光場芯片是一個由多個波導組成的,將光束轉變成球面波前的光學部件,可以被看作是將2D光場變換為4D光場的數學運算器,核心技術是納米級的光學設計和加工技術。
2546
航發設計 ??? 4年前
慧眼識珠:機器視覺技術的工業應用與廠商巡禮 
例如3D視覺中的雙目立體視覺技術,其與機械手配合,能夠對無序堆疊的散裝零件進行準確識別及抓取。 機器視覺在工業的常見應用可以歸納為四大類:檢測、測量、識別與定位。
4227 4 1
機械發明愛好者 ??? 3年前
超表面賦能結構光三維重建 | 實現超大視場高精度實時重建 
p><p><br></p><p>超表面 - 結構光融合的三維重建方案設計</p><p>為突破結構光技術的現有瓶頸,作者團隊提出超表面與結構光的融合方案,具體實現流程如下:</p><p><br></p><p><strong>1.超表面投影設計:</strong>設計專用超表面,可將約 20000 個隨機點投影至 4π 全空間范圍;</p><p><strong>2.深度信息計算:</strong>結合雙目視覺技術與立體匹配算法
2381
武漢二元 ??? 8月前
萬字綜述車載攝像頭 
奔馳 S 級是傳統主機廠方案的代表,雙目立體攝像頭方案是奔馳 S 級最大的優勢。相比于單目攝像頭,雙目攝像頭可以計算當前檢測目標在 X、Y、Z 坐標下的運動情況,判斷檢測目標的姿態及目標類型,奔馳在 L2 級別的 ADAS 功能的體驗效果也比另外兩家好一些。 對已經量產車型的攝像頭方案分析中,我們發現其都是使用中低像素攝像頭來實現自動駕駛功能。
2431 1
木火柴 ??? 4年前
三維重建與自動駕駛的契合點在哪里?盤一盤近幾年SOTA方法! 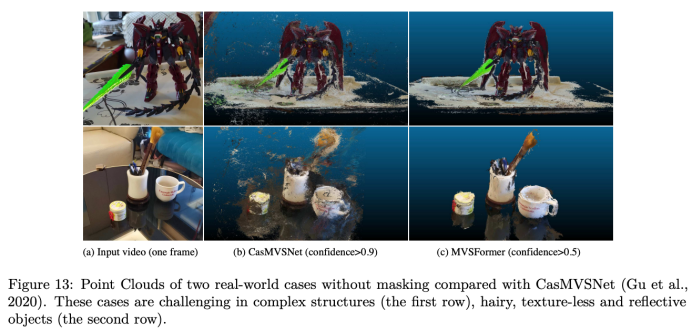
提出一種端到端的多視圖重建深度學習架構,參考基于2張圖片的代價體的雙目立體匹配深度估計方法,擴展到多張圖片中進行深度估計。MVSNet的核心不是直接把3D模型建出來,而是端到端的學習深度圖,它的目標是預測圖片上每個像素的深度信息。在該架構中,首先提取深層的視覺圖像特征,然后通過可微分的單應變換,基于參考視圖的相機視錐體構建3D代價體。
4288
駕駛哥 ??? 3年前
2023CES自動駕駛盤點——卡車自動駕駛篇 
Owl AI 推出3D Thermal Ranger 評估套件Owl AI推出了一款用于高級駕駛員輔助系統(ADAS)和自動駕駛車輛的單眼3D Thermal Ranger計算機視覺產品。
2366 1
駕駛哥 ??? 3年前
自動駕駛汽車中的激光雷達和攝像頭傳感器融合 
輸出:相機幀/歐幾里得坐標 如果不熟悉投影、旋轉和齊次坐標,可以學習立體視覺課程。 這是第1步的結果。 2.2D對象檢測 下一部分是用相機檢測物體。這部分不過多描述,像YOLOv4這樣的算法可以執行對象檢測。有關它的更多信息,可以閱讀YOLOv4研究評論。
2426
駕駛哥 ??? 4年前
五維智能感知——下一代光學的百年演進 
這一組合對自動駕駛去眩光與深度估計、醫療內窺鏡的立體成像具有關鍵價值。路徑三:光譜 + 相位。 將高光譜成像與相位編碼景深擴展技術集成,實現材質識別與三維輪廓的同步獲取。這一組合在工業檢測(同時識別缺陷材質與三維位置)和醫療內窺鏡(同時識別病變組織與立體結構)中具有獨特優勢。三條路徑從TRL 3-4推進至TRL 6-7,工業級兩維融合傳感器率先落地,消費級應用開始探索。
1578
威睛光學 ??? 1月前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
