



自動駕駛行業觀察 | 自動駕駛多模態融合感知詳解(研究現狀及挑戰) 
然而,由于深度信息有限,單目相機難以提取,因此在 3D 空間中直接檢測物體相對具有挑戰性。因此,許多方案使用雙目或立體相機系統通過空間和時間空間來利用附加信息進行 3D 對象檢測,例如深度估計、光流等。激光雷達使用激光系統掃描環境并生成點云。一般來說,大多數激光雷達的原始數據都是四元數,如(x, y, z, r),其中r代表每個點的反射率。
2538
駕駛哥 ??? 3年前
自動駕駛多模態融合感知詳解(研究現狀及挑戰) 
,通常包含相機捕獲的紅色、藍色、綠色通道或其他手動設計的特征作為灰度通道。然而,由于深度信息有限,單目相機難以提取,因此在 3D 空間中直接檢測物體相對具有挑戰性。因此,許多方案使用雙目或立體相機系統通過空間和時間空間來利用附加信息進行 3D 對象檢測,例如深度估計、光流等。激光雷達使用激光系統掃描環境并生成點云。
2814
駕駛哥 ??? 3年前
無人機導航定位系統關鍵技術研究 
它配備了單目、雙目和RGB相機接口。由于缺乏全球定位,SLAM技術受到越來越多的定位誤差影響。單目SLAM算法在機器人高速運動時會出現尺度不確定的問題。很快,閉環誤差將變得太大而無法解決。 為了解決這個問題,人們還提出加攝像頭生成雙目SLAM,或者加IMU生成耦合視覺慣性導航定位系統。初始粒子的位置可以通過視覺測量算法測量的運動變化來跟蹤,而不是在沒有測量的情況下隨機移動它們。
2324
無人機圈 ??? 4年前
一分鐘,帶你了解虛擬現實(VR)的原理 
而如果再不斷地向斜后方增加人數,那么這個相機就能拍攝出無數張只有一個人清晰,而其他部分虛化的照片。 現在,見證奇跡的時刻來了。
2466
非標機械論壇 ??? 4年前
萬字綜述車載攝像頭 
奔馳 S 級是傳統主機廠方案的代表,雙目立體攝像頭方案是奔馳 S 級最大的優勢。相比于單目攝像頭,雙目攝像頭可以計算當前檢測目標在 X、Y、Z 坐標下的運動情況,判斷檢測目標的姿態及目標類型,奔馳在 L2 級別的 ADAS 功能的體驗效果也比另外兩家好一些。 對已經量產車型的攝像頭方案分析中,我們發現其都是使用中低像素攝像頭來實現自動駕駛功能。
2431 1
木火柴 ??? 4年前
慧眼識珠:機器視覺技術的工業應用與廠商巡禮 
例如3D視覺中的雙目立體視覺技術,其與機械手配合,能夠對無序堆疊的散裝零件進行準確識別及抓取。 機器視覺在工業的常見應用可以歸納為四大類:檢測、測量、識別與定位。
4228 4 1
機械發明愛好者 ??? 3年前
三維重建與自動駕駛的契合點在哪里?盤一盤近幾年SOTA方法! 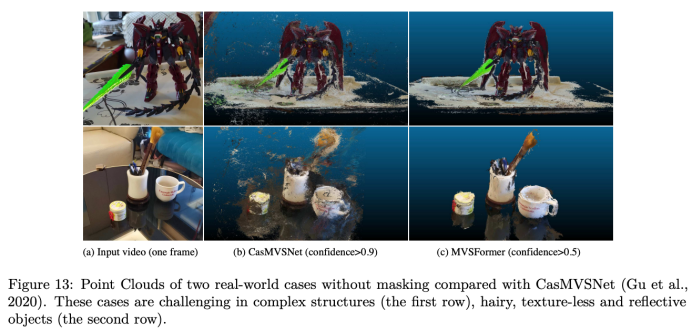
提出一種端到端的多視圖重建深度學習架構,參考基于2張圖片的代價體的雙目立體匹配深度估計方法,擴展到多張圖片中進行深度估計。MVSNet的核心不是直接把3D模型建出來,而是端到端的學習深度圖,它的目標是預測圖片上每個像素的深度信息。在該架構中,首先提取深層的視覺圖像特征,然后通過可微分的單應變換,基于參考視圖的相機視錐體構建3D代價體。
4289
駕駛哥 ??? 3年前
超表面賦能結構光三維重建 | 實現超大視場高精度實時重建 
,實時計算動態圖像的深度信息,生成三維點云;</p><p><strong>3.場景重建執行:</strong>通過連續幀的點云拼接完成增量點云重建,兩臺相機同步掃描捕獲空間場景,再利用實時映射算法構建對應的三維點云與表面模型。
2382
武漢二元 ??? 8月前
一體化ROS智能駕駛小車及實訓教學平臺解決方案 
margin-top: 5px; margin-bottom: 15px; line-height: 1.6em;">多線激光雷達:R550 PLUS(16線,測量距離70-150m,頻率5-20Hz)</p></li>
<li style="clear: both;"><p style="margin-top: 5px; margin-bottom: 15px; line-height: 1.6em;">雙目相機
2767 1
康謀keymotek ??? 7月前
AR關鍵技術及其在航天航空領域中的應用 
光場技術原理:在計算機圖形學領域,3D渲染演示技術的演化進程可以大致劃分成針孔相機、雙目立體視覺、光場、數字全息四個階段。光子光場芯片是光場顯示最核心的部分,光子光場芯片是一個由多個波導組成的,將光束轉變成球面波前的光學部件,可以被看作是將2D光場變換為4D光場的數學運算器,核心技術是納米級的光學設計和加工技術。
2546
航發設計 ??? 4年前

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
