



2-12 基于CV模型卡爾曼濾波、CT模型卡爾曼濾波、IMM模型濾波的目標(biāo)跟蹤 
基于CV模型卡爾曼濾波、CT模型卡爾曼濾波、IMM模型濾波的目標(biāo)跟蹤。輸出跟蹤軌跡及其誤差。程序已調(diào)通,可直接運(yùn)行。
2094 2
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
239 基于matlab的EKF(擴(kuò)展卡爾曼濾波)_UKF(無(wú)跡卡爾曼濾波)_PF(粒子濾波)三種算法的估計(jì)結(jié)果比較 
基于matlab的EKF(擴(kuò)展卡爾曼濾波)_UKF(無(wú)跡卡爾曼濾波)_PF(粒子濾波)三種算法的估計(jì)結(jié)果比較,輸出估計(jì)誤差,并單獨(dú)對(duì)粒子濾波進(jìn)行估計(jì)及其置信區(qū)間可視化。程序已調(diào)通,可直接運(yùn)行。
2198
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
卡爾曼濾波和MATLAB程序詳解視頻算法與實(shí)時(shí)技術(shù)信號(hào)處理 

主要內(nèi)容包括:卡爾曼濾波數(shù)學(xué)模型及MATLAB程序輕松入門,標(biāo)準(zhǔn)卡爾曼濾波處理線性離散隨機(jī)系統(tǒng)算法再提升,卡爾曼濾波理論簡(jiǎn)介與算法主要參數(shù)作用,卡爾曼濾波在定位和視頻跟蹤與估計(jì)實(shí)際信號(hào)等方面的應(yīng)用,擴(kuò)展卡爾曼濾波(EKF)處理非線性微分隨機(jī)系統(tǒng)及其應(yīng)用3例,無(wú)跡卡爾曼濾波(UKF)處理非線性離散隨機(jī)系統(tǒng)及其應(yīng)用,交互式多模型(IMM)濾波及其應(yīng)用與推廣問題。
2557 23
鄭一 ??? 8年前
1-87基于matlab的雙卡爾曼濾波算法 
基于matlab的雙卡爾曼濾波算法。第一步使用了卡爾曼濾波算法,用電池電壓來(lái)修正SOC,然后將修正后的SOC作為第二個(gè)卡爾曼濾波算法的輸入,對(duì)安時(shí)積分法得到的SOC進(jìn)行修正,最終得到雙卡爾曼濾波算法SOC估計(jì)值。結(jié)合EKF算法和安時(shí)積分法的優(yōu)點(diǎn),能夠得到更穩(wěn)定、更精確的估計(jì)結(jié)果。程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
268
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-62基于matlab的鋰電池的模型構(gòu)建、參數(shù)識(shí)別和驗(yàn)證、SoC估計(jì),Simulink采用擴(kuò)展卡爾曼濾波器(EKF) 
基于matlab的鋰電池的模型構(gòu)建、參數(shù)識(shí)別和驗(yàn)證、SoC估計(jì),Simulink采用擴(kuò)展卡爾曼濾波器(EKF),m腳本采用(EKF和(無(wú)跡卡爾曼濾波)UKF)。程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
304
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
基于matlab的擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF) 
基于matlab的擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF),通過卡爾曼濾波算法近似計(jì)算系統(tǒng)的狀態(tài)估計(jì)值和方差估計(jì)值,對(duì)信號(hào)進(jìn)行濾波。程序已調(diào)通,可直接運(yùn)行。需要直接拍下,拍下發(fā)我郵箱。標(biāo)價(jià)為程序價(jià)格,不包含售后。程序保證可直接運(yùn)行。
1982
explicit ??? 2年前
基于matlab的擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF) 
基于matlab的擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF),通過卡爾曼濾波算法近似計(jì)算系統(tǒng)的狀態(tài)估計(jì)值和方差估計(jì)值,對(duì)信號(hào)進(jìn)行濾波。程序已調(diào)通,可直接運(yùn)行。
909
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-90基于matlab的無(wú)跡卡爾曼濾波器參數(shù)估計(jì)的非線性最小二乘優(yōu)化 
基于matlab的無(wú)跡卡爾曼濾波器參數(shù)估計(jì)的非線性最小二乘優(yōu)化,數(shù)據(jù)可更換自己的,程序已調(diào)通,可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
229
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
基于matlab的卡爾曼濾波 
基于matlab的卡爾曼濾波,可更改 狀態(tài)轉(zhuǎn)移方程, 控制輸入,觀測(cè)方程,設(shè)置生成的信號(hào)的噪聲標(biāo)準(zhǔn)差,設(shè)置狀態(tài)轉(zhuǎn)移方差Q和觀測(cè)方差R等參數(shù),程序已調(diào)通,需要直接排下。標(biāo)價(jià)為程序價(jià)格,不包含售后。程序保證可直接運(yùn)行。
1898
explicit ??? 2年前
02基于matlab的卡爾曼濾波 
基于matlab的卡爾曼濾波,可更改 狀態(tài)轉(zhuǎn)移方程, 控制輸入,觀測(cè)方程,設(shè)置生成的信號(hào)的噪聲標(biāo)準(zhǔn)差,設(shè)置狀態(tài)轉(zhuǎn)移方差Q和觀測(cè)方差R等參數(shù),程序已調(diào)通,需要直接拍下。
374
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
1-17基于matlab卡爾曼濾波的行人跟蹤算法 
基于matlab卡爾曼濾波的行人跟蹤算法,并給出算法估計(jì)誤差結(jié)果,判斷算法的跟蹤精確性,程序保證可直接運(yùn)行。購(gòu)買后可下載視頻中的源程序文件。
209
matlab應(yīng)用與學(xué)習(xí) ??? 1年前
17基于matlab卡爾曼濾波的行人跟蹤算法,并給出算法估計(jì)誤差結(jié)果,判斷算法的跟蹤精確性 
基于matlab卡爾曼濾波的行人跟蹤算法,并給出算法估計(jì)誤差結(jié)果,判斷算法的跟蹤精確性,程序已調(diào)通,可直接運(yùn)行,基于MATLAB平臺(tái),可直接拍下。
2088
explicit ??? 2年前
17基于matlab卡爾曼濾波的行人跟蹤算法,并給出算法估計(jì)誤差結(jié)果,判斷算法的跟蹤精確性 
基于matlab卡爾曼濾波的行人跟蹤算法,并給出算法估計(jì)誤差結(jié)果,判斷算法的跟蹤精確性,程序已調(diào)通,可直接運(yùn)行,基于MATLAB平臺(tái),可直接拍下。
2125
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
基于Python的復(fù)雜環(huán)境中車道線自動(dòng)檢測(cè)系統(tǒng) 
卡爾曼濾波器卡爾曼濾波器是一種算法,該算法使用一段時(shí)間內(nèi)對(duì)系統(tǒng)的嘈雜觀測(cè)值來(lái)估計(jì)系統(tǒng)參數(shù)(其中一些是不可觀察的)并預(yù)測(cè)未來(lái)的觀測(cè)值。它會(huì)在每個(gè)時(shí)間步進(jìn)行預(yù)測(cè),進(jìn)行測(cè)量并根據(jù)預(yù)測(cè)和測(cè)量的比較方式進(jìn)行自我更新。 在這里,LaneTracker類實(shí)現(xiàn)用于車道檢測(cè)的卡爾曼濾波器。首先,它初始化狀態(tài)矩陣和測(cè)量矩陣的大小。然后,它計(jì)算了轉(zhuǎn)移矩陣。我們將白高斯噪聲用于我們的系統(tǒng)。
2898 2 2
320科技工作室 ??? 4年前
用轉(zhuǎn)速轉(zhuǎn)矩傳感器驅(qū)動(dòng)的電機(jī)故障先兆量化指標(biāo)體系? 
三、融合類算法 ·卡爾曼濾波融合:構(gòu)建重力信號(hào)狀態(tài)空間模型,結(jié)合低通濾波預(yù)處理后信號(hào)。卡爾曼濾波器預(yù)測(cè)與更新狀態(tài),融合噪聲與信號(hào)信息,有效提取長(zhǎng)期趨勢(shì),適應(yīng)信號(hào)動(dòng)態(tài)變化。 ·多算法融合:先低通濾波初步降噪,再多項(xiàng)式擬合提取趨勢(shì),最后小波去噪精細(xì)處理,綜合各算法優(yōu)勢(shì),在復(fù)雜環(huán)境噪聲中精準(zhǔn)提取長(zhǎng)期趨勢(shì)。
975
博揚(yáng)智能 ??? 2月前
用轉(zhuǎn)速轉(zhuǎn)矩傳感器驅(qū)動(dòng)的電機(jī)故障先兆量化指標(biāo)體系? 
三、融合類算法 ·卡爾曼濾波融合:構(gòu)建重力信號(hào)狀態(tài)空間模型,結(jié)合低通濾波預(yù)處理后信號(hào)。卡爾曼濾波器預(yù)測(cè)與更新狀態(tài),融合噪聲與信號(hào)信息,有效提取長(zhǎng)期趨勢(shì),適應(yīng)信號(hào)動(dòng)態(tài)變化。 ·多算法融合:先低通濾波初步降噪,再多項(xiàng)式擬合提取趨勢(shì),最后小波去噪精細(xì)處理,綜合各算法優(yōu)勢(shì),在復(fù)雜環(huán)境噪聲中精準(zhǔn)提取長(zhǎng)期趨勢(shì)。
2298 1 1
博揚(yáng)智能 ??? 7月前
新能源汽車的電池管理系統(tǒng)里,最核心的技術(shù)的是什么? 
電池 SOC 估算策略目前常用的純電動(dòng)汽車動(dòng)力鋰離子電池 SOC 常用卡爾曼濾波法對(duì)其電量估算。卡爾曼濾波法卡爾曼濾波算法的基本思想是分別建立有效信號(hào)與高斯白噪聲的狀態(tài)空間模型,利用現(xiàn)時(shí)刻的觀測(cè)值和前一時(shí)刻的估計(jì)值,來(lái)更新對(duì)所需狀態(tài)變量的估計(jì)。
2100 2
EV汽車邦 ??? 3年前
粒子濾波PF及MATLAB程序詳解視頻和輔助及正則粒子濾波RPF實(shí)時(shí)跟蹤 
需要了解卡爾曼濾波基礎(chǔ),36分鐘,有程序)17、PF17_粒子濾波處理二維運(yùn)動(dòng)粒子對(duì)象的跟蹤實(shí)例及其效果分析(44分鐘,有程序)18、PF18_粒子濾波對(duì)比擴(kuò)展及無(wú)跡卡爾曼濾波方法分析非線性數(shù)模問題(需要了解擴(kuò)展卡爾曼濾波和無(wú)跡卡爾曼濾波基礎(chǔ),53分鐘,有程序)? ?第五章 ?粒子濾波(PF)處理視頻跟蹤問題19、PF19_1.視頻人物視覺跟蹤中的顏色RGB及HSV模式處理方法
1602 1
鄭一 ??? 8年前
MBSE產(chǎn)品模型架構(gòu)應(yīng)用:基于模型驅(qū)動(dòng)架構(gòu)概念的自主水下航行器控制器的MBSE應(yīng)用(下) 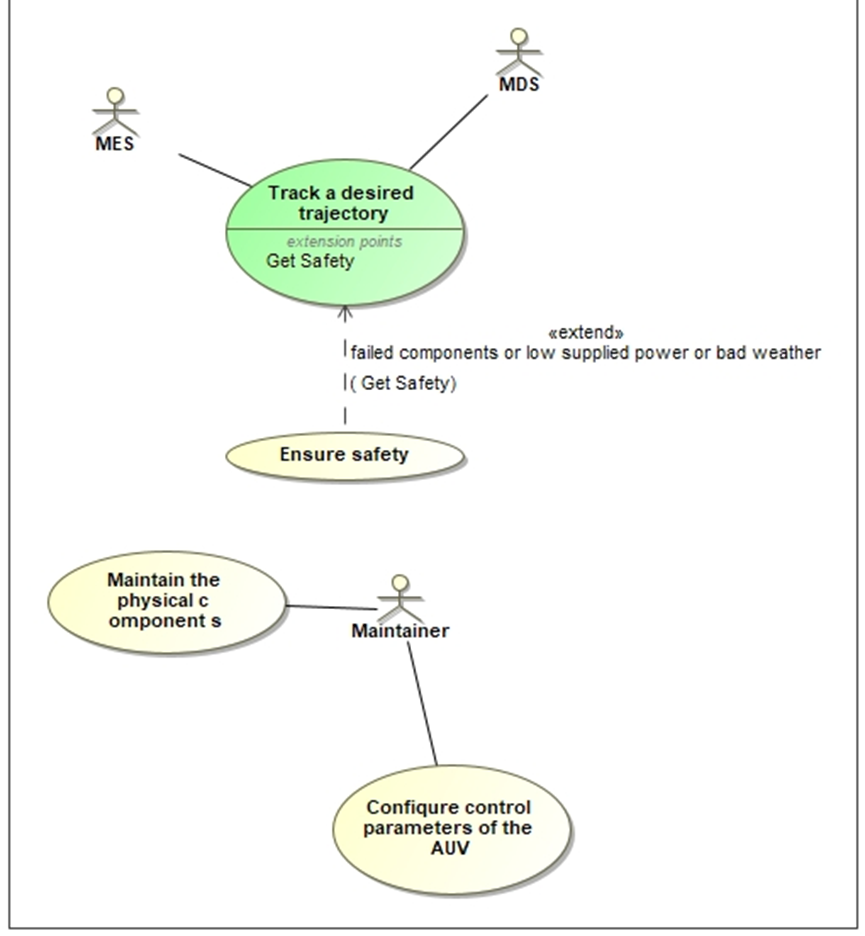
圖9.AUV安裝用于試航 圖 10.AUV達(dá)到并遵循所需的矩形軌跡:(a)使用擴(kuò)展卡爾曼濾波器(EKF)算法;(b) 使用無(wú)跡卡爾曼濾波 (UKF) 算法 圖 11.AUV達(dá)到并遵循所需的三角形軌跡:(a)使用EKF算法;(b)使用UKF算法 表 4.魚雷形AUV航向跟蹤的測(cè)試結(jié)果
2165 1 1
一起學(xué)MBSE ??? 2年前
187基于matlab的彈道目標(biāo)跟蹤濾波方法 
基于matlab的彈道目標(biāo)跟蹤濾波方法,擴(kuò)展卡爾曼濾波(extended Kalman filter, EKF)、轉(zhuǎn)換測(cè)量卡爾曼濾波(conversion measurement Kalman filter, CMKF)跟蹤濾波,得到距離、方位角、俯仰角誤差結(jié)果。程序已調(diào)通,可直接運(yùn)行。
2125
matlab應(yīng)用與學(xué)習(xí) ??? 2年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
