



并聯機械手爪運動學分析 
通過設定θ值的大小,可改變機械手姿態和得到對應的末端位置坐標。對采摘機器手爪的運動理論模型驗證是通過理論模型得到與由矩陣計算得到的兩個末端位置進行比較判斷。設定運動模型的起始點和結束點: 代入公式中求得的采摘機器手爪末端位置坐標與采摘機器手爪運動模型的末端位置坐標相等,證明了采摘機器手爪正向運動學求解方程正確,模型姿態如下圖2.10。
2284
余俊煒 ??? 2年前
解密T型槽鐵地板:為何材質是承載與剛性的“勝負手”?
在重型裝備測試、機械裝配、工裝定點等工業場景中,T型槽鐵地板是核心基礎裝備,其承載能力與結構剛性直接決定作業安全與精度穩定性。而材質作為T型槽鐵地 
解密T型槽鐵地板:為何材質是承載與剛性的“勝負手”? 在重型裝備測試、機械裝配、工裝定點等工業場景中,T型槽鐵地板是核心基礎裝備,其承載能力與結構剛性直接決定作業安全與精度穩定性。而材質作為T型槽鐵地板的核心內核,直接影響其抗變形、耐磨損、承重力等關鍵性能,是區分產品優劣的“勝負手”。
2481
河北威岳 ??? 3月前
誰有智能機械手開發程序包?
誰有智能機械手開發程序包
2083 1 1
兜兜1956 ??? 3年前
機器人機械手的Workbench多體動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。 

機器人機械手的Workbench多體動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。
373
兵荒馬亂 ??? 7年前
六軸機械臂(帶抓手)運動學分析+軌跡規劃 
1正運動學分析 采用標準的D-h法進行機械腿模型分析: D-h表如下 (2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
5213 1
余俊煒 ??? 2年前
基于SolidWorks的自動裝卸機械結構設計 
2.3 機械手手爪的設計 機械爪設計要滿足相應的原則,搬運式手爪實現物體的搬 運和夾取,為多類型手持裝置。加工式手爪為機械手附加設備, 設置銑刀、焊槍等工具,能夠實現作業加工。 機械手手腕為操作最末端,和手爪連接。手爪的空間動作和 作業與手臂配合,滿足實際作業需求,具備一定自由度,并且小 巧輕盈、結構緊湊。
4675 5
太極元氣 ??? 2年前
RecurDyn經典案例:象鼻機器人機械臂的優化設計 
?MFBD(FFlex)技術重現電纜的大變形并預測其強度?考慮了柔性電纜和剛性圓盤之間的接觸(包括摩擦)▎工具包?RecurDyn/Professional ?RecurDyn/FFlex▎工程問題?需要瞬態動力學分析來預測機械手臂的運動?電纜經歷非線性大變形和摩擦接觸?不同的電纜材料(如尼龍或聚四氟乙烯)可能會影響機械手臂的運動?必須確定機械手的工作體積
3366
杭州擬創(RecurDyn原廠) ??? 4年前
為什么最好的機械臂是7個自由度而不是6個? 
同樣地,一個6自由度的機械手,即使某兩組構型對應的末端機構的三維位置相同,機械手在從一個構型移動到另一個構型的時候無法保持末端機構始終不動。 如果有人在電視里看過工業機器人焊東西的話,就會發現它在同一個位置焊接的時候,一會兒整個扭到這邊,一會兒整個扭到那邊,看起來非常酷炫的樣子?! ?/div>
2951
非標機械論壇 ??? 4年前
為什么說AR可視化讓機械臂實驗更高效? 
近期,英國帝國理工大學REDS實驗室就進行了這樣一種嘗試,將AR可視化用來規范柔性機械臂的手動設置流程。整個實驗的流程是,戴上HoloLens的實驗員用手勢操作,將虛擬的AR機械臂移動到設定好的位置上,然后再用手將真的機械臂移動到AR的位置,按照虛擬機械臂的形狀去擺放。如此一來,實驗員可以更準確、直觀的設置柔性機械臂,這與參考2D圖片相比,效率更高,而且誤差也更小。
3904 2 1
機械設計師 ??? 4年前
反應釜機械密封常遇故障及維護 
對于反應釜來說,通常在封頭法蘭與筒體的法蘭、接管法蘭、人孔、手孔、溫度計接管、視鏡、壓力表接管等部位泄漏點采用靜密封,因為密封面是相對靜止的。靜密封比較好解決,一般采用各種形式的靜密封墊片。攪拌軸與釜體之間間隙處的泄漏點,由于旋轉的攪拌軸與靜止的釜體(上封頭)存在相對運動,要防止介質的泄漏必須采用動密封裝置:機械密封與填料密封。
2695 1
材料科學與工程技術 ??? 4年前
Fakuma 2024,威猛集團展出多項先進技術! 
多功能的WX90機械手威猛WX90取澆口機械手(如圖6)也提供了更大的靈活性,從現在開始提供獨立版本,帶有機械手接口(Euromap 67)和自己的控制柜,可用于所有品牌的射出機。該機械手不僅節能,與氣動機械手相比,另一個優勢是該設備的移動非常平穩、準確且快速。有了這些,WX90可以做的比普通的取澆口機械手多得多。
2647
ACMT協會 ??? 1年前
《基于 ABAQUS 的大跨距桁架不同截面模態分析和結構優化》 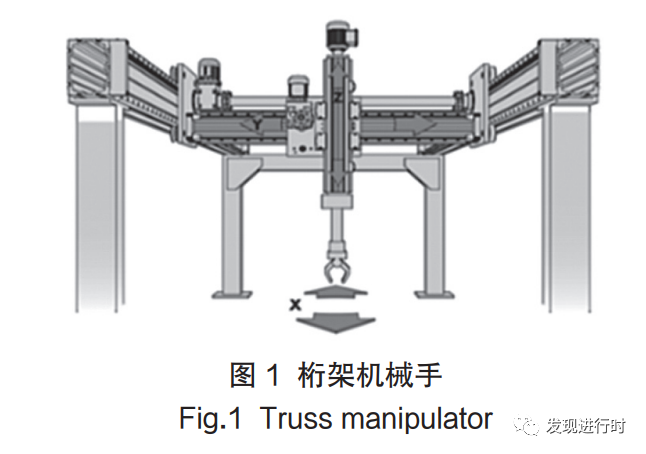
如圖 2 所示,根據企業的車床擺放情況, 設桁架機械手立柱高度為 1 720 mm,橫梁長 8 000 mm,機床縱向間隔 1 600 mm,橫向間隔 1 910 mm。根據其間隔,設計的大跨距桁架機械 手要保留機械手工作區域,使其不與 3 臺 CNC 車床產生碰撞。表 1 為桁架機械手所用材料明 細表。
3166 2
CAEer吳皓 ??? 2年前
增強現實場景下基于穩態視覺誘發電位的機械臂控制系統 
其中,只有一名男性受試者為左利手,其余受試者均為右利手。在整個試驗過程中,受試者坐在相對舒適安靜的實驗室中。
2578 1
機械設計師 ??? 4年前
做非標機械設計,應該考慮這幾個問題 
一、人機學的結構設計1、合理選定操作姿態2、設備的工作臺高度與人體尺寸比例應采用合理數值3、合理安置調整環節以加強設備的適用性4、機械的操縱、控制與顯示裝置應安排在操作者面前最合理的位置5、顯示裝置采用合理的形式6、儀表盤上的刻字應清楚易讀7、旋鈕大小、形狀要合理8、按鍵應便于操作9、操作手柄所需的力和手的活動范圍不宜過大10、手柄形狀便于操作與發力
1918
非標機械論壇 ??? 4年前
傳統測試設備的局限與協作機械臂的破局 
而協作機械臂的引入,為這些問題提供了完美的解決方案。它本質上是一個可自由編程、具備感知能力的“萬能操作手”,通過更換末端執行器(EOAT)和集成不同的測控儀器,它可以執行多種多樣的測試任務,將測試設備從“固定工裝”升級為“柔性工作站”。
2821 1 1
德基西瓜 ??? 7月前
淺談太空“機械臂” 
這種機械臂仍然包括大臂和機器手兩個部分,但應用了更先進的機器視覺、簡短的軟件和人工智能系統,可以在無需航天員遙控干預的情況下執行任務。中國機械臂作用范圍廣我國同樣為天宮空間站研制了高性能的機械臂,它是中國空間站系統的三大關鍵技術之一,也是天宮空間站建設和維護的重要裝備。
2120
機械設計師 ??? 4年前
基于模仿學習和強化學習的機械臂運動技能獲取 
以 Actor-Critic 算法為主體結構搭建了機械臂強化學習模型,結合設計的獎賞函數學習優化技能策略。 圖2 強化學習部分訓練過程 最后,針對上述方法搭建了相應的實驗平臺。實驗平臺的硬件系統包括 UR5 機械臂、氣動二指手抓、Kinect V2 深度攝像頭等;軟件系統由ROS 機器人操作系統、MoveIt!
3352
機械設計師 ??? 4年前
基于紫外線表面激活技術的新包膠注塑工藝 
機械手集成紫外線激活功能實現PC 板LSR 包膠注射,在阿博格技術節上,60噸的全電動注塑機ALLROUNDER 370A 配置了一個閉式針閥冷流道噴嘴, 圖1:60 噸的全電動注塑機ALLROUNDER 370APC 板通過傳送帶傳送到MULTILIFT 機械手系統可取的位置,由夾具吸取,嵌入到模具中,機械手集成了紫外線激活功能,在嵌入過程中完成紫外線表面激活
2461 2 1
ACMT協會 ??? 2年前
庫卡、ABB等12家機械臂3D打印解決方案 
這可以通過大型機器實現,尤其是那些使用 FDM 的機器,同時機械臂也為用戶提供了許多優勢。機器人手臂手不僅可以憑借其長距離臂進行大規模打印,而且由于其多軸以及制造部件通常不需要支撐結構這一事實,它還可以實現更大的自由度。盡管制造機械臂的制造商屈指可數,但它們已被 3D 打印制造商用于聚合物和金屬增材制造解決方案。
2982
南極熊3D打印 ??? 3年前
無人CNC工廠真的來了,你會擔心失業嗎? 
接下來就是加工環節,每臺CNC設備上都安裝了機械手,這些機械手替代了之前的工人,將他們徹底解放了出來。羅衛強介紹,在加工環節,這些形態各異的機械手,分別負責某個夾位?!耙粋€夾位處理好后,自動轉到另一個夾位,機械手就這樣自動進行處理。”為了能提高準確度,長盈精密還在進行方案的設計,“其中一個解決方案是,利用無阻力滑軌,機器人在上面滑來滑去,以此來完成生產工序。”
1985
模具設計UG編程教學 ??? 3年前
20條/頁 
 20
20 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
