



abaqus氣動軟體抓手末端力測試怎么做?
氣動軟體抓手,仿真末端力輸出和抓手彎曲角度怎么出結果
2181 1 3
九月CC ??? 3年前
六軸機械臂(帶抓手)運動學分析+軌跡規劃 
1正運動學分析 采用標準的D-h法進行機械腿模型分析: D-h表如下 (2)通過(1)求解出機器人各位姿變換矩陣后,求解機器人手臂變換矩陣。通過matlab 計算,寫出機器人末端位置。
5212 1
余俊煒 ??? 2年前
并聯機械手爪運動學分析 
通過設定θ值的大小,可改變機械手姿態和得到對應的末端位置坐標。對采摘機器手爪的運動理論模型驗證是通過理論模型得到與由矩陣計算得到的兩個末端位置進行比較判斷。設定運動模型的起始點和結束點: 代入公式中求得的采摘機器手爪末端位置坐標與采摘機器手爪運動模型的末端位置坐標相等,證明了采摘機器手爪正向運動學求解方程正確,模型姿態如下圖2.10。
2284
余俊煒 ??? 2年前
基于SolidWorks的自動裝卸機械結構設計 
機械手動作通過 7 個 控制點和 4 個電磁閥實現伸縮、旋轉、抓放和上下的動作。另 外,利用信號開關啟動機械手感知部分,將電感式傳感器設置 在左右極限點,將磁電開關設置到上下極限點,表 1 為氣動機 械手 I/O 表。
4673 5
太極元氣 ??? 2年前
解密T型槽鐵地板:為何材質是承載與剛性的“勝負手”?
在重型裝備測試、機械裝配、工裝定點等工業場景中,T型槽鐵地板是核心基礎裝備,其承載能力與結構剛性直接決定作業安全與精度穩定性。而材質作為T型槽鐵地 
解密T型槽鐵地板:為何材質是承載與剛性的“勝負手”? 在重型裝備測試、機械裝配、工裝定點等工業場景中,T型槽鐵地板是核心基礎裝備,其承載能力與結構剛性直接決定作業安全與精度穩定性。而材質作為T型槽鐵地板的核心內核,直接影響其抗變形、耐磨損、承重力等關鍵性能,是區分產品優劣的“勝負手”。
2481
河北威岳 ??? 3月前
誰有智能機械手開發程序包?
誰有智能機械手開發程序包
2083 1 1
兜兜1956 ??? 3年前
機器人機械手的Workbench多體動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。 

機器人機械手的Workbench多體動力學仿真,視頻免費無聲音,操作細致,提供附件(需購買)練習。
373
兵荒馬亂 ??? 7年前
Fakuma 2024,威猛集團展出多項先進技術! 
圖5:A軸、B軸和C軸的伺服組合 以這種方式減輕重量為抓手和零件提供了更高的負載能力,因此在許多應用中可以使用比以前更小的機械手型號。展會上展示各種軸組合,包括A軸、B軸和C軸的伺服組合(如圖5),適用于各種不同的應用。總的來說,現在威猛機械手型號及其新的軸和軸組合能夠涵蓋更多樣化的應用。
2647
ACMT協會 ??? 1年前
基于模仿學習和強化學習的機械臂運動技能獲取 
以 Actor-Critic 算法為主體結構搭建了機械臂強化學習模型,結合設計的獎賞函數學習優化技能策略。 圖2 強化學習部分訓練過程 最后,針對上述方法搭建了相應的實驗平臺。實驗平臺的硬件系統包括 UR5 機械臂、氣動二指手抓、Kinect V2 深度攝像頭等;軟件系統由ROS 機器人操作系統、MoveIt!
3351
機械設計師 ??? 4年前
CNC數控加工中心的分類方法 
機械手換刀結構的刀庫常使用圓盤式刀庫,在換刀時由機械手進行抓刀、選刀和換刀。負責在刀庫和數控加工中心的主軸之間傳遞刀具,將替換下來的數控刀具送回刀庫內,再將需要使用的刀具推送到主軸上。2-直接換刀方式。這種方式主要是指換刀過程由刀庫和主軸箱配合完成。這種情況下配置的刀庫一般是斗笠式的。直接換刀方式的換刀速度較慢、故障率較高,一般只在早期的機型上使用;3-轉塔頭換刀方式。
2600
2103707493 ??? 2年前
慧通測控車載觸摸屏測試系統,賦能車載觸摸屏品質 
未來,隨著測試技術的持續迭代,此類專業化測試設備或將成為汽車電子企業提升核心競爭力的關鍵抓手。
396
德基西瓜 ??? 5天前
為什么最好的機械臂是7個自由度而不是6個? 
同樣地,一個6自由度的機械手,即使某兩組構型對應的末端機構的三維位置相同,機械手在從一個構型移動到另一個構型的時候無法保持末端機構始終不動。 如果有人在電視里看過工業機器人焊東西的話,就會發現它在同一個位置焊接的時候,一會兒整個扭到這邊,一會兒整個扭到那邊,看起來非常酷炫的樣子。
2951
非標機械論壇 ??? 4年前
為什么說AR可視化讓機械臂實驗更高效? 
近期,英國帝國理工大學REDS實驗室就進行了這樣一種嘗試,將AR可視化用來規范柔性機械臂的手動設置流程。整個實驗的流程是,戴上HoloLens的實驗員用手勢操作,將虛擬的AR機械臂移動到設定好的位置上,然后再用手將真的機械臂移動到AR的位置,按照虛擬機械臂的形狀去擺放。如此一來,實驗員可以更準確、直觀的設置柔性機械臂,這與參考2D圖片相比,效率更高,而且誤差也更小。
3904 2 1
機械設計師 ??? 4年前
RecurDyn經典案例:象鼻機器人機械臂的優化設計 
?MFBD(FFlex)技術重現電纜的大變形并預測其強度?考慮了柔性電纜和剛性圓盤之間的接觸(包括摩擦)▎工具包?RecurDyn/Professional ?RecurDyn/FFlex▎工程問題?需要瞬態動力學分析來預測機械手臂的運動?電纜經歷非線性大變形和摩擦接觸?不同的電纜材料(如尼龍或聚四氟乙烯)可能會影響機械手臂的運動?必須確定機械手的工作體積
3366
杭州擬創(RecurDyn原廠) ??? 4年前
半軸精車、鉆孔、孔倒角自動化設計 
圖6 發那科R-2000iC機器人 ⑵機械手爪:機器人手爪為2套相同手爪并列布局,實現上下料切換,如圖7所示。手爪為氣動結構,手指為仿形設計,可穩定抓取工件桿部。本方案手爪采用杠桿原理,配置缸徑 φ160mm氣缸,通過拉緊松開杠桿,實現手爪開合抓取工件動作,抓取范圍直徑 φ45~ φ65mm。
2376
FMMM ??? 4年前
自主水下航行器 (AUV) | 近實時仿真與控制助力實現水下機動航行 
例如,有位同事在 AUV 被控對象模型的前端增設了一個抓手。盡管還沒有抓手的物理硬件,但該同事借助仿真設計了一個 LQR 控制器,該控制器可對使用抓手時可能遇到的沖激載荷和其他擾動作出正確的響應。該團隊也將探索類似抓手的應用。該抓手裝在 AUV 的側面,使航行器能夠鎖定到一個或多個相同的 AUV,并開始作為一個多智能體系統運行。
3066 3 2
泡沫oO ??? 2年前
反應釜機械密封常遇故障及維護 
對于反應釜來說,通常在封頭法蘭與筒體的法蘭、接管法蘭、人孔、手孔、溫度計接管、視鏡、壓力表接管等部位泄漏點采用靜密封,因為密封面是相對靜止的。靜密封比較好解決,一般采用各種形式的靜密封墊片。攪拌軸與釜體之間間隙處的泄漏點,由于旋轉的攪拌軸與靜止的釜體(上封頭)存在相對運動,要防止介質的泄漏必須采用動密封裝置:機械密封與填料密封。
2695 1
材料科學與工程技術 ??? 4年前
《基于 ABAQUS 的大跨距桁架不同截面模態分析和結構優化》 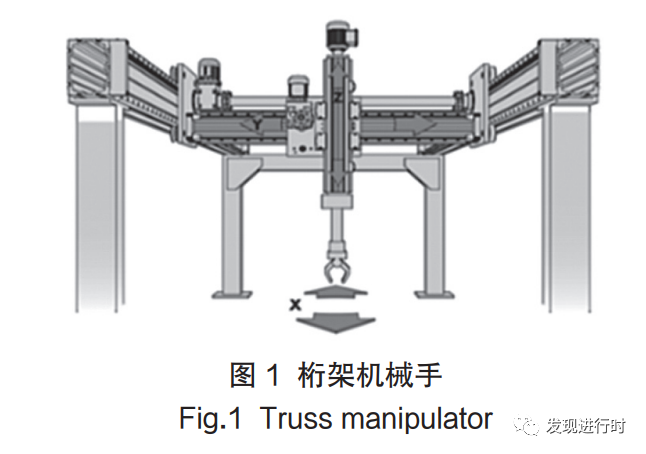
如圖 2 所示,根據企業的車床擺放情況, 設桁架機械手立柱高度為 1 720 mm,橫梁長 8 000 mm,機床縱向間隔 1 600 mm,橫向間隔 1 910 mm。根據其間隔,設計的大跨距桁架機械 手要保留機械手工作區域,使其不與 3 臺 CNC 車床產生碰撞。表 1 為桁架機械手所用材料明 細表。
3166 2
CAEer吳皓 ??? 2年前
關于全域土地綜合整治的15個問題!! 
o 指標易地交易政策是撬動金融和社會資本的重要抓手和驅動力。o 讓資源變資產、資金變股金、農民變股東,綠水青山變金山銀山。o 增減掛鉤政策是一項開創性、壓箱底政策。o 增減掛鉤對扶貧攻堅具有實招、實功、實效作用,是超常規政策和有力抓手。o 增減掛鉤是解決“地從哪里來、錢從哪里出”的有效渠道。
2308
礦山地質環境網 ??? 3年前
淺談太空“機械臂” 
這種機械臂仍然包括大臂和機器手兩個部分,但應用了更先進的機器視覺、簡短的軟件和人工智能系統,可以在無需航天員遙控干預的情況下執行任務。中國機械臂作用范圍廣我國同樣為天宮空間站研制了高性能的機械臂,它是中國空間站系統的三大關鍵技術之一,也是天宮空間站建設和維護的重要裝備。
2120
機械設計師 ??? 4年前
20條/頁 
 26
26 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
