



基于多工況加權柔度響應的汽車控制臂拓撲優化 
概述汽車控制臂(Control Arm)是懸架系統的關鍵部件,其核心作用是將車輪與車架連接,并在車輛行駛過程中承受并傳遞來自車輪的多方向力和力矩。拓撲優化的目標是在給定的設計空間、材料和工況下,找到材料的最優分布,使結構在滿足多種性能要求(如剛度、強度、頻率)的同時,實現輕量化。
625
320科技工作室 ??? 5天前
【技術帖】基于架構開發的汽車懸架控制臂優化設計 
文章實采汽車在試車場的路譜信號,基于以上方法,根據后下控制臂的受載特征,將實采路譜的輪心處載荷分解到后下控制臂,得到簡化的多級載荷塊,開發了后下控制臂的單通道臺架試驗,進行快速驗證,零件通過單通道快速驗證后,進一步搭載后橋系統多通道臺架試驗進行系統級的驗證,在兩側輪心加載。零件級臺架試驗,如圖14 所示。系統級臺架試驗,如圖15 所示。在要求的試驗循環里均無失效發生,驗證了優化方案滿足耐久性能。
3158
肥皂寶寶 ??? 4年前
基于optistruct汽車控制臂三種工況、加上1階模態下的多目標拓撲優化案例 
本例以汽車控制臂三種工況、加上1階模態下的多目標拓撲優化為例,講述在optistruct中是如何進行多目標拓撲優化,非公式,目的就是快速得到傳遞路徑,與傳統輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學也可以聯系我,有相關的資料購買后對于模型中不懂的地方都可以問
2225 1 9
lz1234 ??? 3年前
基于optistruct汽車控制臂多工況拓撲優化 

汽車控制臂三種工況下的多目標拓撲優化為例,講述在optistruct中是如何進行多目標拓撲優化,從而滿足特定要求下汽車控制臂的概念設計。對于單目標拓撲優化你會發現每一種工況下拓撲優化的結果不一樣,多目標拓撲優化則綜合考慮多種工況下的目標得到一個綜合結果。 對于多目標優化常用的手段:1、將目標轉化為約束條件;2、對多目標采用加權的方法得到一個綜合目標。
1073 9
CAE行路人 ??? 6年前
多通道DSP控制陣列高度的技術 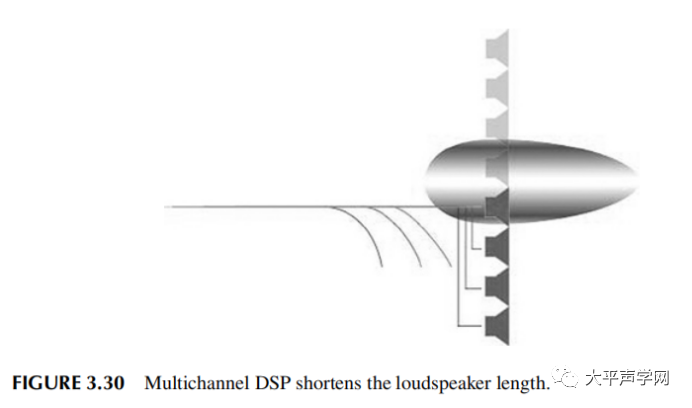
【基本概念】 1 多通道DSP控制陣列高度的技術(Multichannel DSP Control of Array Height) 它是一種在垂直揚聲器陣列中使用多個數字信號處理器(DSP)通道來控制聲音波束的方向性和高度的方法。這里的陣列高度是指聲學波束的高度,而不是實際揚聲器驅動單元的物理高度。
1995 1
聲學仿真初學者 ??? 2年前
氣體質量流量控制器是否可以測量多個通道的流量? 
系統層面的多通道解決方案:模塊化與集成化 當涉及到真正的物理多通道——即需要同時控制多種不同氣體的混合或配比時,布瑯軻鍶特同樣提供了成熟的解決方案,在化學氣相沉積、燃料電池測試或復雜的分析儀器中,往往需要同時精確控制4路、8路甚至更多路的氣體流量。
710
曾澤明-前端 ??? 18天前
汽車軟件RTOS-之AUTOSAR OS多核控制簡介 
AUTOSAR的軟件架構已經成為汽車電子控制領域不可逆轉的趨勢,當前國內不少車企,已經把非AUTOSAR軟件架構的電子控制器供應商排除在供應商目錄之列。同時隨著汽車電子芯片的飛速發展,用于AUTOSAR Classic的MCU也發展迅猛。迅速從單核跨入到多核時代,主頻和內存空間也有了大幅度的提升。很多車型已經集成了基于AUTOSAR的軟件架構和多核芯片的控制單元,以滿足日益復雜的電子電器架構。
2102
木火柴 ??? 4年前
Hyperworks控制臂網格劃分和縱向/側向靜剛度、縱向和側向雙軸臺架疲勞、靜剛度+臺架疲勞多目標拓撲優化、非線性Buckling Force仿真分析實例視頻教程 
本課程基于瑪莎拉蒂前懸架控制臂,詳細介紹了控制的網格劃分方法以及縱向和側向靜剛度的仿真分析方法、縱向和側向雙軸組合疲勞的仿真分析方法、縱向側向剛度和臺架疲勞的多目標拓撲優化的仿真方法、縱向和側向非線性Buckling_Force的求解方法。
2682 1
辰巳午未 ??? 2年前
行業標準IN/IN數字控制接口的雙通道H橋電流控制電機驅動器-SS8844T 
雙通道H橋驅動器(用于電機控制)結構組成:其核心是兩個獨立的H橋電路。每個H橋由四個開關元件(通常是MOSFET)構成,分為上、下橋臂。電機連接在兩個橋臂的中點之間。雙通道設計意味著可以獨立控制兩個直流電機。工作原理:正轉/反轉:通過控制對角線上的一對開關管導通(如左上+右下),另一對關閉,來改變流過電機的電流方向,從而實現電機的正反轉。
1098
如果我年少有為 ??? 2月前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計算:麥弗遜/雙叉臂/多連桿/H臂一網打盡 
五連桿后懸除了運動副建模以外,也可以采用多約束裝配的建模方法,如下圖所示。使用多約束裝配控制轉向節安裝點與副車架安裝點之間的距離,最終控制轉向節的最終姿態。多約束裝配不僅適用于五連桿后懸,也適用于其它各類型的前后懸架。多約束裝配相比運動副建模求解速度快,建模簡單等優點。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計算 ??? 12月前
雙通道H橋驅動并且每個H橋可提供4.0A電流的電流控制電機驅動器 
雙通道H橋驅動通過兩個獨立的H橋電路分別控制兩個電機,實現同步正反轉、獨立調速等功能。其核心原理如下:結構組成:每個通道包含四個開關元件(如MOSFET或IGBT),分為上下橋臂。電機連接在橋臂中間,兩端分別接至左右橋臂。工作模式:正轉?:同時導通上半橋的兩個開關管,電流從正電源經電機流向負電源;下半橋開關管保持關閉。
2970
如果我年少有為 ??? 8月前
增強現實場景下基于穩態視覺誘發電位的機械臂控制系統 
然而,大部分重度失能患者無法通過傳統的人機交互方式(語音、鍵盤等)控制康復機器人,因此人機交互能力的擴展對于發揮康復機器人系統的作用至關重要。 腦機接口(Brain-Computer Interface,BCI)是一種不依賴人體外周神經和肌肉的,在大腦與外界環境間建立直接信息與控制通道的技術,實現大腦與外部設備間的直接交互。
2576 1
機械設計師 ??? 4年前
適合12V系統產品的國產16V/1A兩通道H橋驅動芯片-SS6849H 
雙通道H橋驅動芯片通過獨立控制兩個H橋電路實現電機的獨立驅動或同步控制。以下是其核心工作原理:驅動方式:每個通道包含四個開關元件(如MOSFET或IGBT),分為上下橋臂。通過交替導通上下橋臂的開關元件控制電流方向,實現電機的正反轉、制動及調速。電機控制模式:?正轉?:同時導通上半橋的兩個開關元件,電流從正電源經電機流向負電源。
2177
如果我年少有為 ??? 7月前
每個H橋可提供輸出電流1.6A的雙通道H橋電流控制電機驅動器-SS8812T 
雙通道H橋電流控制電機驅動器是一種電子電路,用于獨立控制兩個直流電機的方向、速度和制動。它基于H橋拓撲結構,每個通道包含四個開關元件(如MOSFET或晶體管),形成一個“H”形電路,電機作為負載連接在橋臂上。?雙通道設計允許同時控制兩個電機,每個通道獨立工作。例如,一個通道控制電機1,另一個控制電機2,通過各自的PWM信號和方向控制實現多軸運動(如機器人輪子驅動)。?
2443
如果我年少有為 ??? 5月前
懸架技術介紹上篇-傳統被動懸架 
車輪傾角角度的不同會直接影響到輪胎的磨損,同時,多連桿懸掛結構能通過前后置定位臂和上下控制臂有效控制車輪的外傾角。
4662 1
EDC電驅未來 ??? 2年前
某型電動汽車路噪性能優化 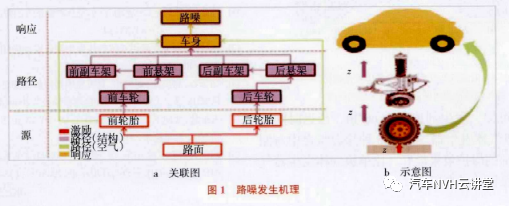
縱臂剛體模態通過實 測量可確定模態頻率在30~90Hz,其 中與激勵頻率刈‘應的,z向主模態分別低于40Hz及 80Hz,所以應降低 系統頻率以提升縱臂軸套的隔振能/,J由于需要保證安全性能,依據控制經驗確定優化方案為:后縱臂襯套剛度下降20%,主要進行襯套膠料更改,不進行結 構變更。完成樣件制作后,依據原定測試況進行汽車路噪性能測試,測試結果,如圖5所示。
4765 1
汽車公社 ??? 2年前
【虹科案例】虹科數字化儀在多通道、多功能測試和測量系統中的應用 
本文將研究這些產品如何在多通道/多功能測試系統中用于多種測試應用。
2367 1
虹科-馬穎 ??? 3年前
Adams比利時路面控制臂動態載荷分解&Hyperworks控制臂疲勞壽命仿真分析實例視頻教程 
本課程分為兩節:第一節介紹了利用adams軟件,以24通道輪心力作為輸入,來分解比利時路面上控制臂的動態載荷的詳細方法過程;第二節介紹了利用hyperworks軟件,基于第一節提取的動態載荷,來仿真分析比利時路面上控制臂的疲勞壽命。
1620 1
辰巳午未 ??? 2年前
純電動汽車整車控制器原理及功能解析 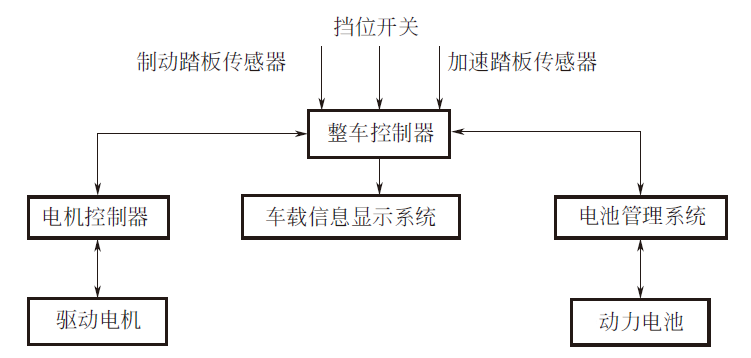
整車控制器在軟硬件上都應該具備一定的自保護能力,以防止極端情況的發生。 ② 整車控制器需要有足夠多的I/O接口,能夠快速、準確地采集各種輸入信息,至少具備兩路A/D轉換通道用于采集加速踏板信號和制動踏板信號,應該具有多個開關量輸入通道,用于采集汽車擋位信號,同時應該具有多個用于驅動車載繼電器的功率驅動信號輸出通道。
2752 2
汽車公社 ??? 3年前
庫卡、ABB等12家機械臂3D打印解決方案 
這可以通過大型機器實現,尤其是那些使用 FDM 的機器,同時機械臂也為用戶提供了許多優勢。機器人手臂手不僅可以憑借其長距離臂進行大規模打印,而且由于其多軸以及制造部件通常不需要支撐結構這一事實,它還可以實現更大的自由度。盡管制造機械臂的制造商屈指可數,但它們已被 3D 打印制造商用于聚合物和金屬增材制造解決方案。
2979
南極熊3D打印 ??? 3年前
20條/頁 
 166
166 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
