



Ansys Zemax | 使用 OpticStudio 進行閃光激光雷達系統建模(中) 
成像透鏡系統隨后可觀察到投影的光源陣列,以獲取投射光線的飛行時間信息,進而生成投影點的深度信息。 在本文中,我們將介紹如何將上篇的序列模式起始結構進行轉換,并向非序列模型中添加更多細節。我們還將應用 ZOS-API 在閃光激光雷達系統中生成一些時間飛行結果。
2036 1
宇熠科技 ??? 3年前
ZEMAX | 旋轉對稱不規則性(RSI)簡介 
在任何具有大量表面的系統(例如內窺鏡、投影透鏡或光刻透鏡)中,RSI很快就會成為問題。通常假設此類系統中的表面誤差是隨機組合的,因此對總誤差的估計是每種誤差類型的和均方根 (RSS)。但這不適用于 RSI 多項式,RSI誤差不直接相加,但總誤差大于RSS計算得出的值。例如,四個RSI多項式項如下所示,每個項的系數值為0.01。 上述四個多項式之和如下所示。
2044
宇熠科技 ??? 4年前
聯合方案 | Ansys二維光柵出瞳擴展系統優化 
有關編寫API以訪問OpticStudio的更多信息,請參閱知識庫文章:Knowledgebase > Programming > API:https://support.zemax.com/hc/en-us/sections/1500001168641-API 圖 9 生成Python交互式擴展代碼的樣板。 另外幾個模塊被導入到樣板中。
2727 4 1
Ansys中國 ??? 2年前
Ansys Speos | 手把手教你畫光導 
在reverse direction可以改變光的方向,當然也可以通過點擊3D視圖中的箭頭來反轉光方向;6.在General-Distance選項中,設置參數type光導棱鏡與光導面之間的關系,或是棱鏡與引導曲線上的距離為基礎Curvilinear,或是投影來定義基于投影平面上的導向曲線的曲線距離Projection,當然投影方式需要選擇投影平面參考,定義棱鏡起點位置和end棱鏡結束位置
2544
宇熠科技 ??? 3年前
支持8K屏、光均勻度超96%,創必得發布智能光固化3D打印新品ChiTu E10&M20 
為了更好的服務企業級客戶,ChituConsole APP提供的API接口可以快速幫助企業級客戶完成APP的搭建,助力云打印的實現。
2213
南極熊3D打印 ??? 4年前
國內鋰電池CAE仿真軟件的突破口
一是不斷優化仿真模型及其控制方程,及時跟蹤電池仿真在微觀、介觀尺度上的前沿進展,將精度更好的理論模型內置在軟件之中,并開發出適配電池領域的網格劃分工具。其次是可以向COMSOL學習,保持軟件的開放性,這一點是指在建模階段仿真工程師可以自定義修改設立控制方程組(偏微分方程組)及其假設條件,而不是只能采用軟件內置的方程組。
2870 1
仿真客 ??? 3年前
關于鉆井,你想了解的都在這… 
鉆井液性能 按照API推薦的鉆井液性能測試標準,需檢測的鉆井液常規性能包括:密度、漏斗粘度、塑性粘度、動切力、靜切力、API濾失量、HTHP濾失量、PH值、堿度、含砂量、固相含量、膨潤土含量和濾液中各種離子的質量濃度等。1)鉆井液密度 鉆井液的密度是指每單位體積鉆井液的重量,常用g/cm3(或kg/cm3)表示。
10132 3
化工活動家 ??? 3年前
自動駕駛系統中視覺感知模塊的安全測試 
具體來說,先將物品投影到地面上,使用OBB代替三維物體進行相交性檢查.同時為了彌補三維物品在垂直地面的維度上的層次丟失,引入圖層的概念(圖2),每個圖層上均存在物體的OBB投影,碰撞檢測時需針對物品的多個圖層同時進行.在場景生成時,會隨機選擇靜態物品,并依次添加到環境當中,若新物體與老物體未發生碰撞,則物品生成有效.
1815
木火柴 ??? 4年前
自動駕駛決策規劃中的問題與挑戰 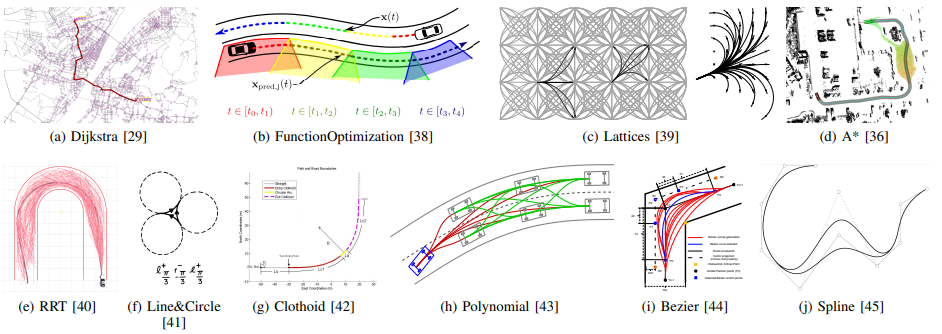
在自動駕駛的定位、感知、預測、決策規劃和控制等模塊中,感知模塊就像是人的眼睛和耳朵,負責對外部環境進行感知;控制模塊就像人的雙手和雙腳,負責最終的加減速、轉向等操作;而決策規劃模塊就像人的大腦,基于接收到的感知等信息進行行為決策和軌跡生成。
2213
駕駛哥 ??? 3年前
自動駕駛決策規劃中的問題與挑戰
在自動駕駛的定位、感知、預測、決策規劃和控制等模塊中,感知模塊就像是人的眼睛和耳朵,負責對外部環境進行感知;控制模塊就像人的雙手和雙腳,負責最終的加減速、轉向等操作;而決策規劃模塊就像人的大腦,基于接收到的感知等信息進行行為決策和軌跡生成。
1994
芝能汽車 ??? 3年前
基于達索系統3D體驗平臺的鐵路土建工程BIM協同設計技術研究 | 達索系統百世慧? 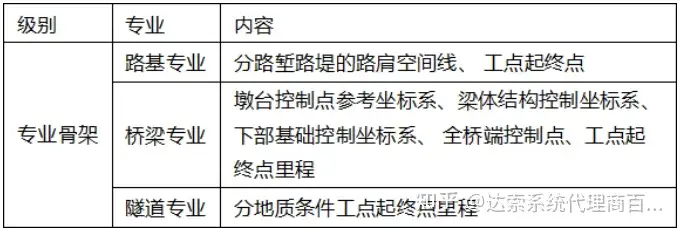
對于U型槽來說,以左線投影線作為基準,根據U型槽單元長度、伸縮縫寬度,使用EKL腳本語言中的split()函數批量切割空間左線,生成每個U型槽段落的空間骨架,作為模型實例化的輸入條件。3. 隧道骨架設計以正洞和洞室為例,首先編制設計信息表,該表既可以作為隧道構件模板實例化的依據,也可以作為骨架建模的依據。
4406 2 1
達索系統百世慧 ??? 3年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
