OMNIS – 如何在汽車領(lǐng)域應(yīng)對當今和未來的多物理場仿真挑戰(zhàn)?

本文作者:Yannick Baux, Cadence產(chǎn)品研發(fā)總監(jiān)
space
 汽車行業(yè)一直使用 CFD 工具來設(shè)計和優(yōu)化車輛的各個方面,從外部空氣動力學到降噪,再到熱管理、內(nèi)部燃燒等等。大多數(shù)情況下,在設(shè)計過程中,所有上述內(nèi)容被結(jié)合在一起,稱為虛擬原型,以便將車輛作為一個系統(tǒng)進行優(yōu)化。然而,各種應(yīng)用背后的物理原理往往大不相同,這就意味著需要為每個特定的應(yīng)用采用專門的技術(shù)。因此,設(shè)計師、科學家或工程師經(jīng)常使用大量不同的 CAE 代碼和軟件工具,這些工具都有不同的界面(GUI)、數(shù)據(jù)設(shè)置、結(jié)構(gòu)和格式,且每種工具都專注于自身特定的學科,之間沒有聯(lián)系或聯(lián)系不緊密。對于用戶來說,非常有必要為用于多學科設(shè)計和優(yōu)化循環(huán)的整個 CAE 工作流程提供一種更全面、更有效率的工作方法。
汽車行業(yè)一直使用 CFD 工具來設(shè)計和優(yōu)化車輛的各個方面,從外部空氣動力學到降噪,再到熱管理、內(nèi)部燃燒等等。大多數(shù)情況下,在設(shè)計過程中,所有上述內(nèi)容被結(jié)合在一起,稱為虛擬原型,以便將車輛作為一個系統(tǒng)進行優(yōu)化。然而,各種應(yīng)用背后的物理原理往往大不相同,這就意味著需要為每個特定的應(yīng)用采用專門的技術(shù)。因此,設(shè)計師、科學家或工程師經(jīng)常使用大量不同的 CAE 代碼和軟件工具,這些工具都有不同的界面(GUI)、數(shù)據(jù)設(shè)置、結(jié)構(gòu)和格式,且每種工具都專注于自身特定的學科,之間沒有聯(lián)系或聯(lián)系不緊密。對于用戶來說,非常有必要為用于多學科設(shè)計和優(yōu)化循環(huán)的整個 CAE 工作流程提供一種更全面、更有效率的工作方法。
這就是 Cadence OMNIS 軟件的用武之地:這是一個端到端的 CAE 環(huán)境,提供了專門的工具來快速有效地解決仿真過程的每一步。OMNIS 為從設(shè)計到結(jié)果分析在內(nèi)的整個 CAE 工作流程提供了全局性的方法,用戶可以通過一個超流暢的用戶界面開始工作,或通過 Python API 自動控制,甚至還可以由優(yōu)化模塊控制。其統(tǒng)一的用戶界面減輕了用戶的學習負擔,一致的數(shù)據(jù)結(jié)構(gòu)避免了緩慢的文件轉(zhuǎn)換和惱人的損壞錯誤。獨特的 OMNIS 框架使各種工具能夠在一個工作流程中相互溝通,同時內(nèi)置的多種求解器允許用戶使用廣泛的技術(shù)來解決任何流體/聲學流問題,并且靈活性高,支持通過 API 導(dǎo)入內(nèi)部開發(fā)的或開源的求解器和工具。
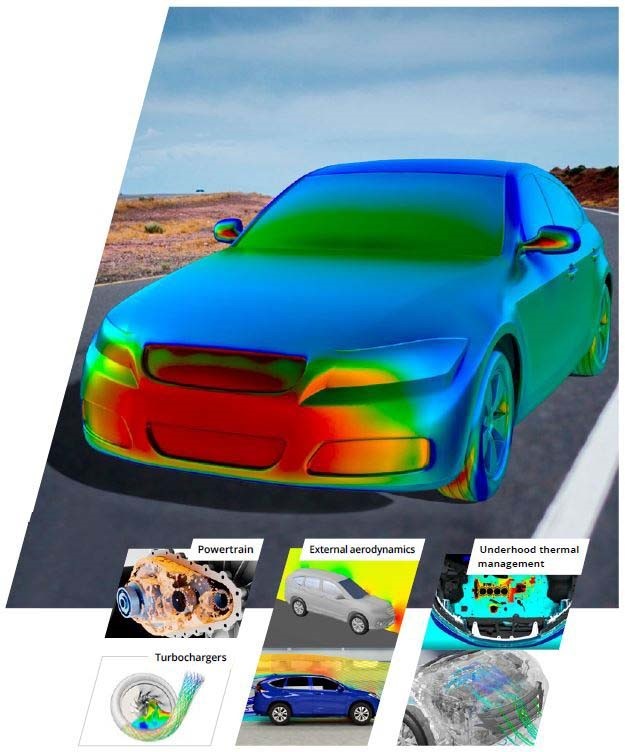
本文將介紹 OMNIS 如何憑借其廣泛的 CFD 技術(shù),解決汽車設(shè)計中最復(fù)雜的流體流挑戰(zhàn),同時在一個精簡、易于使用的協(xié)作工作流程中減少工程設(shè)計和求解時間。圖 1 的例子介紹了各種應(yīng)用,如:引擎蓋下的熱管理、外部空氣動力學、動力系統(tǒng)、聲學和引擎蓋下的部件,如渦輪增壓器。所面臨的挑戰(zhàn)是:大相徑庭的物理學原理,不同的部門參與,以及設(shè)計周期的嚴格限制。對此,OMNIS 提供的解決方法是...
軟件仿真準備
要想成功設(shè)置軟件仿真,首先要為仿真準備幾何模型。除了直接在 OMNIS 中創(chuàng)建設(shè)計外,還可以直接打開主流的文件格式(例如 ACIS、IGES、STEP、STL、Parasolid、CATIA、Pro/ENGINEER 或 SolidEdge),導(dǎo)入外部幾何圖形。
在 OMNIS 中,幾何圖形在整個軟件仿真過程中都保持不變,確保了模塊之間的無損傳輸和分析的一致性。為了確保初始設(shè)計的可靠性達到最佳水平,OMNIS 的數(shù)據(jù)結(jié)構(gòu)直接指向 CAD 數(shù)據(jù)。所有材料、物理和數(shù)字屬性都與 CAD 模型實體相聯(lián)系。相同的 CAD 命名和層次結(jié)構(gòu)將保證仿真設(shè)置的一致性,并將自動工作流程中的用戶工作量降到最低。
生產(chǎn)級的幾何圖形可能包含間隙、干擾、緊固件和非常小的物件。這些物件對于制造來說往往是必要的,但對于仿真來說卻增加了不必要的復(fù)雜性。為了以自動化程度最高的方式為軟件仿真準備幾何圖形,必須使用編輯設(shè)計工具。

特別地,填補拓撲孔和縫隙是主要的耗時操作之一,如車門和乘客艙之間的縫隙,或拆除連接渦輪增壓器渦殼兩部分的螺釘后留下的孔。在這方面,創(chuàng)新的 AutoSeal 功能優(yōu)于所有其他標準的編輯和修復(fù)幾何工具。
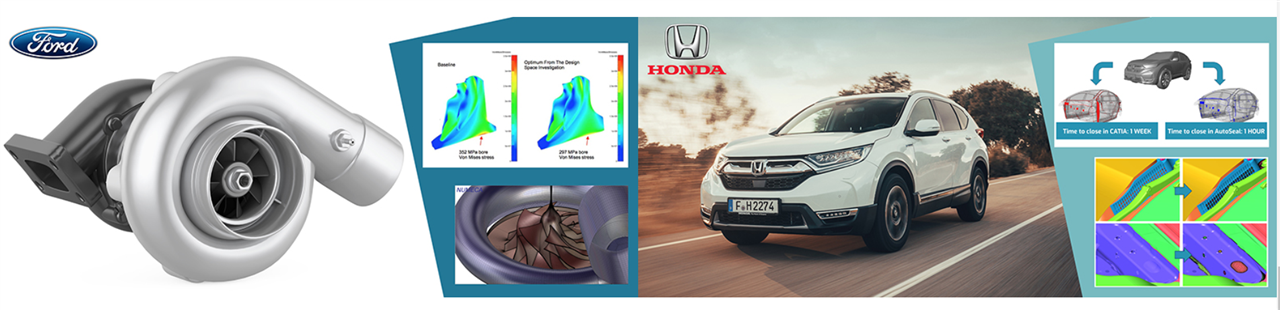
現(xiàn)在,用戶可以一鍵修復(fù)非水密性的不平整的任意幾何體,將工程時間從幾天縮短到幾個小時。例如,Honda(本田公司)報告說,一個熟練的工程師以前通常需要用一整周的時間來填補一個車艙空間的所有孔;現(xiàn)在,借助 AutoSeal,整個過程耗費的時間已經(jīng)縮短到了一個小時左右。
預(yù)處理
目前,沒有哪一種單一的網(wǎng)格生成技術(shù)可以滿足所有應(yīng)用的要求,在可預(yù)見的未來也是如此;因為設(shè)計的大小、形狀、復(fù)雜性和相關(guān)的物理學原理都不盡相同。解決方案必然來自于結(jié)合使用各種網(wǎng)格生成技術(shù)。OMNIS 的網(wǎng)格生成策略有兩個方面:一是將所有的網(wǎng)格技術(shù)提升到最佳狀態(tài),然后是在計算領(lǐng)域內(nèi)結(jié)合使用最合適的技術(shù)。非結(jié)構(gòu)化網(wǎng)格生成為處理幾何體的復(fù)雜性提供了更多的靈活性;同時,OMNIS/Hexpress 用戶可以選擇帶有懸掛節(jié)點的全六面體網(wǎng)格,或混合元素共形網(wǎng)格,“不太整潔”的幾何體容限體積到表面的方法,或表面到體積的方法,膨脹、變形或擠壓邊界層膨脹技術(shù),等等。
例如,Honda的工程師負責執(zhí)行和分析引擎蓋下的 CFD 氣動熱計算:散熱器風扇、發(fā)動機艙/外圍設(shè)備周圍的流體、排氣系統(tǒng)等。他們的預(yù)處理階段曾經(jīng)十分耗時且繁瑣。在切換到 OMNIS/Hexpress 后,他們成功地將 CPU 時間縮減到過去的三分之一,工程時間縮短到每個網(wǎng)格 30 分鐘,取代原先的幾周時間。
多年來,業(yè)內(nèi)一直致力于實現(xiàn)完全自動化的多模塊結(jié)構(gòu)網(wǎng)格生成,因為它具有卓越的網(wǎng)格質(zhì)量,并且單元數(shù)量更少。在這一領(lǐng)域,AutoGrid5 是推進器、能源和發(fā)動機行業(yè)中無可爭議的全球標準。通過其基于向?qū)У膶S霉ぷ髁鞒蹋梢灾笇?dǎo)用戶在幾分鐘內(nèi)為廣泛的渦輪機械應(yīng)用生成 100M 以上的高質(zhì)量單元。
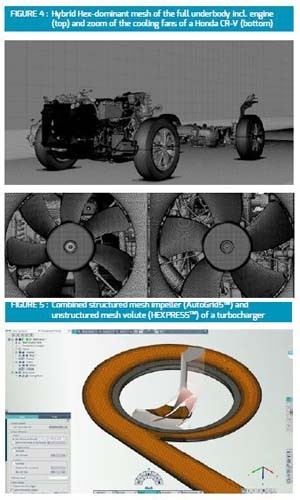 OMNIS 將葉片部分的高質(zhì)量結(jié)構(gòu)化網(wǎng)格與渦流部分的全六面體非結(jié)構(gòu)化網(wǎng)格相結(jié)合,使流體求解器以每百萬節(jié)點、每個內(nèi)核 30 分鐘至 2 小時的速度完成收斂(圖 2)。Ford(福特公司)證明,使用十幾個內(nèi)核,在 3-4 個工作條件下新設(shè)計的氣動分析可以在 2 小時內(nèi)完成!與標準的商業(yè)求解器相比,這個結(jié)果令人印象深刻,因為后者需要一整天的時間才能完成。
OMNIS 將葉片部分的高質(zhì)量結(jié)構(gòu)化網(wǎng)格與渦流部分的全六面體非結(jié)構(gòu)化網(wǎng)格相結(jié)合,使流體求解器以每百萬節(jié)點、每個內(nèi)核 30 分鐘至 2 小時的速度完成收斂(圖 2)。Ford(福特公司)證明,使用十幾個內(nèi)核,在 3-4 個工作條件下新設(shè)計的氣動分析可以在 2 小時內(nèi)完成!與標準的商業(yè)求解器相比,這個結(jié)果令人印象深刻,因為后者需要一整天的時間才能完成。
廣泛的求解器技術(shù)
現(xiàn)在,人們會使用多個求解器來解決復(fù)雜的工程仿真任務(wù)。這種方法被廣泛用于多物理學仿真,其中為特定物理學特性而設(shè)計的求解器被結(jié)合起來,用于分析不同物理現(xiàn)象對所分析幾何體整體行為的影響以及它們的相互作用。覆蓋從流體-結(jié)構(gòu)相互作用仿真到航空聲學分析和各種復(fù)雜的流動物理學,如多相和多物種流,以及與優(yōu)化框架的聯(lián)系。OMNIS 通過 OMNIS/Turbo、OMNIS/Open、FINE/Marine、FINE/Acoustics 和 FINE/FSI-Oofelie 提供了一系列強大的求解器,還提供了一個用于連接外部工具、開源工具和求解器的 Python API。
例如,汽車外部空氣動力學的主要焦點是預(yù)測阻力和升力的準確性,阻力和升力用于衡量設(shè)計性能。雖然這些仿真通常任務(wù)繁重,但數(shù)值算法必須是有效的、經(jīng)過驗證的,仿真工作流程必須是穩(wěn)健的、獨立于用戶的。為了實現(xiàn)這些目標,OMNIS/Open 為汽車空氣動力學模板提供了最佳的網(wǎng)格、數(shù)值和物理設(shè)置,預(yù)設(shè)了最大的速度和穩(wěn)健性,并且?guī)缀鯚o需用戶干預(yù)。
OMNIS/Turbo 的結(jié)構(gòu)化方法對于旋轉(zhuǎn)機械周邊設(shè)備(如渦輪增壓器或水泵)來說十分有益,這也是上文所提到的;與市場上的其他技術(shù)相比,其速度和精度都有明顯的優(yōu)勢,速度提高了 10 倍到 20 倍!當利用 HPC 將 CPU 和 GPU 結(jié)合起來時,速度優(yōu)勢會更進一步提高。在離心式壓縮機上,可以獲得 3 到 5 倍的速度提升。
另一方面,由于移動部件和體與體接觸 (body-to-body contact),傳統(tǒng)流動求解器無法勝任齒輪箱潤滑分析。OMNIS/LB 能夠在中觀尺度上處理復(fù)雜的幾何形狀,而無需耗費精力設(shè)置和微調(diào)網(wǎng)格。該解決方案提供了 LES 級的表示,可以捕捉復(fù)雜的現(xiàn)象,如飛濺、滴落、晃動等。
得益于開放的架構(gòu),OMNIS 還支持基于強大的求解器插件 API 集成內(nèi)部求解器。C/C++、Python 或 Fortran API 提供了所有的構(gòu)建塊,然后將它們組合在一起,與外部求解器耦合,使其獲得上述所有能力。
設(shè)計探索
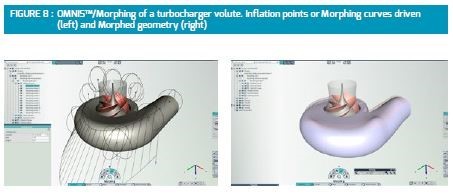
運行單一方案往往只是軟件仿真過程的第一步。在大多數(shù)情況下,工程師希望研究備選設(shè)計方案并比較其結(jié)果。OMNIS 提供多種選擇來改變設(shè)計。得益于 OMNIS 雙向 CAD 網(wǎng)關(guān)(匝道器), 可以從 CAD 系統(tǒng)中參數(shù)化導(dǎo)入設(shè)計,或者用 OMNIS Agile 旋轉(zhuǎn)機械參數(shù)化葉片建模器生成,甚至可以用 OMNIS 變形工具從原始幾何形狀中變形而來,如下圖所示:
文章來源:cadence博客





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




