



ZEMAX軟件技術(shù)應(yīng)用專題:如何為光學(xué)相干斷層掃描系統(tǒng)建模 
深度掃描也稱為軸向掃描或A掃描,它根據(jù)反射到樣品中的距離來測量反射光的強(qiáng)度。 儘管它在OCT系統(tǒng)的類型之間有所不同,但深度掃描通常由參考鏡執(zhí)行,以使樣品返回的光對應(yīng)於樣品和參考之間的特定光程差(OPD)。 透過以x或y方向旋轉(zhuǎn)掃描鏡來執(zhí)行橫向,橫向或b掃描,從而在整個樣品區(qū)域上平移探測光束。我們從商用OCT系統(tǒng)中獲取目標(biāo)規(guī)格。 軸向分辨率完全來自光源特性,應(yīng)在5μm的數(shù)量級上。
2221
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:基於 Alvarez自由曲面透鏡的光學(xué)變焦 
我們在一個光學(xué)系統(tǒng)中有幾組透鏡元件,它們沿著光軸沿著預(yù)定義的軌跡移動,從而提供了光學(xué)系統(tǒng)最終焦距(變焦係數(shù))的變化。在 Alvarez變焦鏡頭的情況下,我們有一對所謂的Alvarez鏡頭,這些鏡頭元件相互之間的橫向位移提供了光學(xué)系統(tǒng)焦距的變化。傳統(tǒng)變焦鏡頭與 Alvarez變焦鏡頭的主要區(qū)別在於,傳統(tǒng)系統(tǒng)鏡頭沿光軸運動,而Alvarez系統(tǒng)鏡頭則沿垂直於光軸的方向運動。
2219
w**elab86_Swsp ??? 3年前
設(shè)置伺服驅(qū)動器的8個關(guān)鍵參數(shù) 
首先調(diào)整速度比例增益KVP值.調(diào)整之前必須把積分增益KVI及微分增益KVD調(diào)整至零,然后將KVP值漸漸加大;同時觀察伺服電機(jī)停止時足否產(chǎn)生振蕩,并且以手動方式調(diào)整KVP參數(shù),觀察旋轉(zhuǎn)速度是否明顯忽快忽慢.KVP值加大到產(chǎn)生以上現(xiàn)象時,必須將KVP值往回調(diào)小,使振蕩消除、旋轉(zhuǎn)速度穩(wěn)定。此時的KVP值即初步確定的參數(shù)值。如有必要,經(jīng)KⅥ和KVD調(diào)整后,可再作反復(fù)修正以達(dá)到理想值。
2309
非標(biāo)機(jī)械論壇 ??? 4年前
伺服電機(jī)、變頻電機(jī)、普通電機(jī)之間有什么區(qū)別? 
通過上位控制器發(fā)送的脈沖序列來控制速度和位置(當(dāng)然也有些伺服內(nèi)部集成了控制單元或通過總線通訊的方式直接將位置和速度等參數(shù)設(shè)定在驅(qū)動器里),驅(qū)動器內(nèi)部的算法和更快更精確的計算以及性能更優(yōu)良的電子器件使之更優(yōu)越于變頻器。
2086
非標(biāo)機(jī)械論壇 ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何在OpticStudio中設(shè)計DOE透鏡或超穎透鏡 
繞射光學(xué)元件(DOE)和超表面/超穎透鏡在光學(xué)系統(tǒng)設(shè)計中越來越受歡迎,其應(yīng)用範(fàn)圍從手機(jī)鏡頭到AR / VR耳機(jī),從3D傳感到照明。但是,對於包含 DOE 或超穎透鏡的系統(tǒng)進(jìn)行模擬和設(shè)計總是很棘手的。沒有通用的方法可以處理所有情況。設(shè)計人員需要根據(jù)具體情況決定其系統(tǒng)的策略。
2186
w**elab86_Swsp ??? 3年前
【伺服電機(jī)特點及未來發(fā)展方向】- 米思米機(jī)械設(shè)備知識分享 
(3)快速響應(yīng)性好:快速響應(yīng)性是伺服系統(tǒng)動態(tài)品質(zhì)的標(biāo)志之一,即要求跟蹤指令信號的響應(yīng)要快,一方面要求過渡過程時間短,一般在200ms以內(nèi),甚至小于幾十毫秒;另一方面,為滿足超調(diào)要求,要求過渡過程的前沿陡,即上升率要大。 2、伺服系統(tǒng)的主要特點(1)精確的檢測裝置:以組成速度和位置閉環(huán)控制。
2344
MISUMI米 ??? 2年前
雙工位雙向臥式框架伺服數(shù)控擠壓液壓機(jī)設(shè)計與開發(fā) 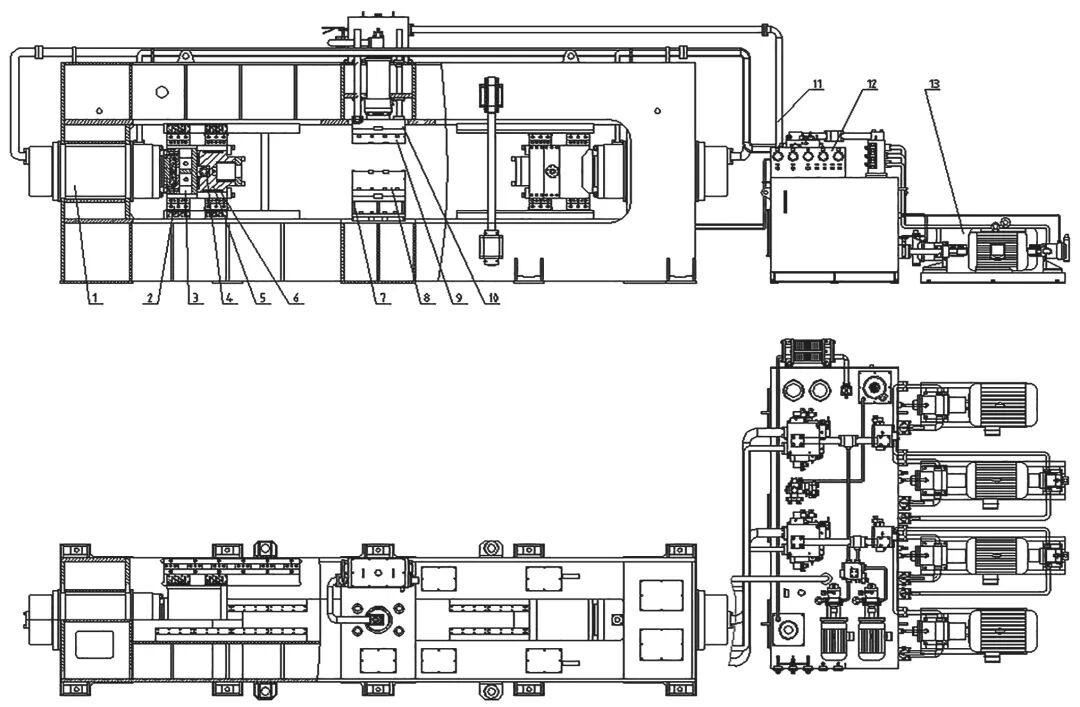
⑻主伺服油泵電機(jī)組選用高壓內(nèi)嚙合雙聯(lián)齒輪泵系列,給擠壓油缸快速供油以實現(xiàn)擠壓水平滑塊的快進(jìn)以及快速退回工作,可大大提高壓機(jī)動作的穩(wěn)定性及可靠性、節(jié)能降耗、降低機(jī)床噪聲等。兩側(cè)的擠壓油缸、夾緊油缸、輸送工件機(jī)構(gòu)的推拉油缸分別都有各自獨立的閥體系統(tǒng)和各自獨立的伺服油泵電機(jī)組,便于調(diào)試和維護(hù)保養(yǎng)。動力站上設(shè)有液位控制繼電器,防止系統(tǒng)缺油和超限而報警。
3281 1
FMMM ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何使用ZOS-API創(chuàng)建飛行時間用戶分析 
打開LiDAR 文件可以在本文的附件連結(jié)中下載檔案“Flash_NSC_Final.zar”,該檔中包含代表快閃雷射雷達(dá)的系統(tǒng),雷射雷達(dá)位於貨車的頂部,貨車在路上,路上還有兩個行人和一堵立著的綠色牆體。雷射雷達(dá)向場景中發(fā)射雷射脈衝:光照射到周圍的物體上發(fā)生散射,部分光被散射回雷射雷達(dá)探測器。
2080
w**elab86_Swsp ??? 3年前
未來的芯片需求,將來自什么應(yīng)用?
如構(gòu)筑新生活圈的元宇宙,從平臺端到應(yīng)用端,各式環(huán)節(jié)都需要伺服器的資料處理和儲存功能;最近吵得轟轟烈烈的區(qū)塊鏈,不論是公有鏈、私有鏈還是聯(lián)盟鏈,也需要伺服器支援;不久的未來誕生的量子電腦,屆時演算更快,而伺服器當(dāng)然是不可或缺的元件。
1937
電子元器件超市 ??? 4年前
3種伺服電機(jī)控制方式,很多PLC工程師都不了解! 
就伺服驅(qū)動器的響應(yīng)速度來看:轉(zhuǎn)矩模式運算量最小,驅(qū)動器對控制信號的響應(yīng)最快;位置模式運算量最大,驅(qū)動器對控制信號的響應(yīng)最慢。
1969 1
電工電氣一網(wǎng)通 ??? 4年前
PLC工程師都應(yīng)了解的3種伺服電機(jī)控制方式 
如果控制器運算速度比較快,可以用速度方式,把位置環(huán)從驅(qū)動器移到控制器上,減少驅(qū)動器的工作量,提高效率; 如果有更好的上位控制器,還可以用轉(zhuǎn)矩方式控制,把速度環(huán)也從驅(qū)動器上移開,這一般只是高端專用控制器才能這么做。
2089
跟我學(xué)PLC ??? 4年前
ZEMAX軟件技術(shù)應(yīng)用專題:利用Kogelnik方法模擬體積全像光柵的繞射效率 
如果厚度從t到t'發(fā)生變化,則可以透過修改K∥計算出新的光柵向量,如方程式(4)。圖 4. 當(dāng)全像材料收縮時,厚度從t 減少到 t'。我們現(xiàn)在已經(jīng)介紹了體積全像圖模型的基礎(chǔ)知識。要了解有關(guān)如何在 OpticStudio 中應(yīng)用該理論、如何設(shè)置序列和非序列系統(tǒng)以及下載範(fàn)例系統(tǒng)的更多信息,您可以在此處取得本知識庫文章的全部內(nèi)容。
2121
w**elab86_Swsp ??? 3年前
汽車開關(guān)類高低溫伺服電動測試系統(tǒng):嚴(yán)苛環(huán)境下的精準(zhǔn)可靠性驗證 
其中開關(guān)類零部件作為高頻交互部件,需在 - 40℃極寒到 90℃高溫的復(fù)雜車載環(huán)境中,穩(wěn)定完成按壓、旋轉(zhuǎn)、拉拔等動作,其力學(xué)性能、耐久度與環(huán)境適應(yīng)性必須經(jīng)過嚴(yán)苛驗證?;弁y控推出的高低溫環(huán)境伺服電動測試系統(tǒng),專為汽車開關(guān)類零部件定制,以模塊化設(shè)計、高精度傳感與全場景適配能力,成為汽車零部件可靠性測試的核心工具。
1360
德基西瓜 ??? 1月前
為什么說鋁沖壓和液壓成型工藝是未來發(fā)展趨勢 
據(jù)了解,捷豹常熟新工廠使用世界最快的5序伺服沖壓生產(chǎn)線(3秒/件、High-speed servo press line),世界最快的機(jī)械沖壓生產(chǎn)線(4秒/件),可自由在鋼鋁材之間無縫切換,75%的模具即可用于伺服高速沖壓線也可用于機(jī)械沖壓線。伺服沖壓生產(chǎn)線在未來全鋁車身沖壓解決方案中或?qū)⒆兊门e足輕重!
2234
機(jī)械學(xué)霸 ??? 3年前
不同品牌的直線模組怎樣實現(xiàn)替換? 
直線模組最早是在德國開發(fā)使用的,因其單體運動速度快、重復(fù)定位精度高、本體質(zhì)量輕、占設(shè)備空間小、壽命長,已經(jīng)被廣泛應(yīng)用到各種各樣的設(shè)備當(dāng)中,也是自動化設(shè)備中不可缺失的一部分,那么這時候為成本考慮,人們都會在心里提出一個疑問,直線模組壞了能不能替換? 事實上是可以的!
1999
高技傳動 ??? 3年前
2000坐標(biāo)系與現(xiàn)行坐標(biāo)系的關(guān)系及采用2000坐標(biāo)系之后的一些變化 
空間上相同經(jīng)緯度坐標(biāo)點在1954年北京坐標(biāo)系、1980西安坐標(biāo)系及2000國家大地坐標(biāo)系下具有不同的大地平面坐標(biāo)(統(tǒng)充一采用高斯投影6度分帶)。
2723
巖土聯(lián)盟 ??? 4年前
Ansys Zemax光學(xué)設(shè)計軟件技術(shù)教程:眼科鏡片設(shè)計 
但人眼系統(tǒng)具有相對較小的光瞳尺寸,因此在此類系統(tǒng)的設(shè)計上,一般會認(rèn)為球差和彗差並不十分重要。同理,其餘的像差在此也可先行忽略。隨著自由曲面製程技術(shù)的演進(jìn),光學(xué)設(shè)計者得以摒除許多以往的限制條件。同時,OpticStudio具有優(yōu)越的運算能力,可以進(jìn)行規(guī)模較大的系統(tǒng)和更多影像參數(shù)的模擬。得益於此,眼科鏡片的設(shè)計可以有更進(jìn)一步的改善,我們將在以下的文章中詳述。
2212
w**elab86_Swsp ??? 3年前
伺服 / 空心杯 / 異步電機(jī)三賽道揭秘:千億市場、技術(shù)壁壘與國產(chǎn)突圍 
全球伺服電機(jī)市場同樣呈現(xiàn)強(qiáng)勁增長態(tài)勢,2023年底全球市場規(guī)模已增長至530億元人民幣,年度增長率保持在6%左右。2. 競爭格局:伺服電機(jī)市場競爭激烈,主要廠商包括日本、歐洲和美國的企業(yè),以及一些中國和亞洲地區(qū)的制造商。在中國市場,伺服電機(jī)行業(yè)分為日系、歐美系、臺灣系和國產(chǎn)品牌四個陣營。市場份額排名前五的品牌占比超過50%,其中匯川技術(shù)首次市場份額占比排名第一,市占率達(dá)15.9%。
2571
電機(jī)研習(xí)社 ??? 12月前
分享 | 智能液壓機(jī)發(fā)展趨勢及關(guān)鍵技術(shù) 
目前主要應(yīng)用開關(guān)磁阻電動機(jī)(SMR),具有簡單可靠、可在較寬的轉(zhuǎn)速和轉(zhuǎn)矩范圍內(nèi)高效四象限運行、響應(yīng)速度快和成本低等優(yōu)點。隨著驅(qū)動控制系統(tǒng)性能提高,價格下降,促進(jìn)了大功率交流伺服驅(qū)動技術(shù)的實現(xiàn)和推廣,為在鍛壓裝備領(lǐng)域采用交流伺服驅(qū)動提供了可能。其缺點是:轉(zhuǎn)矩存在較大波動、振動大;系統(tǒng)具有非線性特征,控制成本高,功率密度低等。
2661 6 3
機(jī)械工程師 ??? 3年前
ZEMAX軟件應(yīng)用專題:波前 (OPD) 怎麼算的 
然後可以看到系統(tǒng)自動加入兩個Coordinate Break以及相關(guān)設(shè)定,如下。最後在確保把Chief的長度設(shè)定到出瞳的Radius上。便可以看到系統(tǒng)現(xiàn)在如下。打開評價函數(shù),重新輸入以下數(shù)值驗證??梢钥吹侥壳暗淖畲笠晥?(Hy=1) 邊緣光線 (Py=-1) 的波前差等於3.555676,跟OPD Fan中的結(jié)果一致。
2508 1
w**elab86_Swsp ??? 3年前
20條/頁 
 24
24 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
