



ZEMAX軟件技術(shù)應(yīng)用專題:智慧型手機(jī)鏡頭模組 
射出成型技術(shù)使可能的創(chuàng)新光學(xué)機(jī)構(gòu)設(shè)計(jì)技術(shù),具有大規(guī)模生產(chǎn)的模塊很多好處。鏡頭可以設(shè)計(jì)成具有復(fù)雜的邊緣特徵,使它們能夠堆疊,從而簡化組裝並消除對齊的需要。Zemax 工具使注塑光學(xué)元件的可能性最大化變得簡單。在 OpticStudio 中創(chuàng)建的光學(xué)設(shè)計(jì)可以無縫轉(zhuǎn)換為原始 CAD 元件,並且所有光學(xué)資訊都完好無損。
2042
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:如何在OpticStudio中設(shè)計(jì)DOE透鏡或超穎透鏡 
繞射光學(xué)元件(DOE)和超表面/超穎透鏡在光學(xué)系統(tǒng)設(shè)計(jì)中越來越受歡迎,其應(yīng)用範(fàn)圍從手機(jī)鏡頭到AR / VR耳機(jī),從3D傳感到照明。但是,對於包含 DOE 或超穎透鏡的系統(tǒng)進(jìn)行模擬和設(shè)計(jì)總是很棘手的。沒有通用的方法可以處理所有情況。設(shè)計(jì)人員需要根據(jù)具體情況決定其系統(tǒng)的策略。
2186
w**elab86_Swsp ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:基於 Alvarez自由曲面透鏡的光學(xué)變焦 
Alvarez變焦的一般表示及其與傳統(tǒng)光學(xué)變焦的比較我們的 Alvarez 變焦鏡頭的核心是無焦伽利略系統(tǒng)。第一對Alvarez鏡組代表伽利略系統(tǒng)的物鏡,而第二對Alvarez鏡組代表目鏡。要了解更多資訊,您可以在 MyZemax.com 找到以下文章,這些文章將介紹如何在 OpticStudio 中對 Alvarez 變焦鏡頭進(jìn)行建模並查看真實(shí)範(fàn)例!
2219
w**elab86_Swsp ??? 3年前
自主水下航行器 (AUV) | 近實(shí)時(shí)仿真與控制助力實(shí)現(xiàn)水下機(jī)動(dòng)航行 
該抓手裝在 AUV 的側(cè)面,使航行器能夠鎖定到一個(gè)或多個(gè)相同的 AUV,并開始作為一個(gè)多智能體系統(tǒng)運(yùn)行。 ◆ ◆ ◆ ◆ ~關(guān)于作者~ Ivan Stenius 是瑞典皇家理工學(xué)院的副教授。他的研究領(lǐng)域包括復(fù)合材料、流固耦合和流體動(dòng)力學(xué)、水翼技術(shù)、電力推進(jìn)、海洋機(jī)器人、基于模型的系統(tǒng)工程,以及欠驅(qū)動(dòng)系統(tǒng)動(dòng)力學(xué)。
3063 3 2
泡沫oO ??? 2年前
仿生撲翼飛行器的控制系統(tǒng) 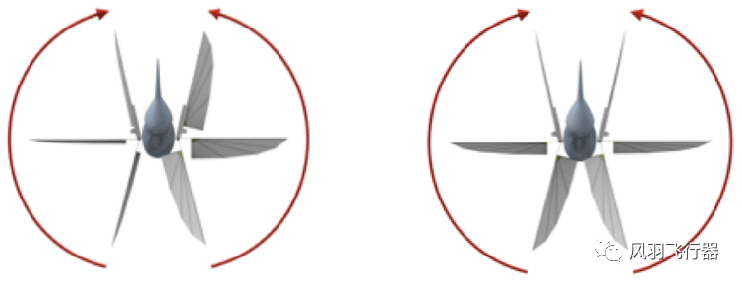
對于固定翼和旋翼的飛行器,最簡單的控制方法就是多通道遙控器與接收機(jī)的開源控制。 但由于撲翼飛行器本身易受擾動(dòng),當(dāng)飛行環(huán)境的變化對機(jī)身產(chǎn)生額外的擾動(dòng)時(shí),飛行器本身不能及時(shí)自穩(wěn),只能依靠操縱手來手動(dòng)修正飛行姿態(tài),該方法對操作經(jīng)驗(yàn)提出了很高的要求。
5065 7 4
我愛飛機(jī) ??? 2年前

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
