



abaqus生成AVL EXCITE柔性體文件(.exb) 

前段時(shí)間有客戶咨詢AVL EXCITE柔性體文件的生成方法,之前使用abaqus做過adams、simpack等動(dòng)力學(xué)軟件的柔性體,其大體方法基本一致。 該視頻以一個(gè)簡(jiǎn)單模型為例,借助hypermesh進(jìn)行前處理,通過abaqus的關(guān)鍵詞編輯以及批處理方法的應(yīng)用,對(duì).exb文件的生成流程進(jìn)行了展示。
147 10
H&O ??? 7年前
ADAMS剛?cè)狁詈戏抡媲爸谩狝NSYS WB轉(zhuǎn)換生成柔性體(.mnf文件) 
,不存在可供選擇的標(biāo)記點(diǎn),因此需要在生成柔性體時(shí)人工設(shè)置連接副的標(biāo)記點(diǎn)。
5342 3
魏羨魚 ??? 1年前
分享Hypermesh入門簡(jiǎn)單開發(fā)技巧 附Hypermesh生成柔性體MNF文件下載 
下載地址:Hypermesh生成柔性體MNF文件
3133 1
模玩 ??? 3年前
CAE仿真小技巧——多體動(dòng)力學(xué)柔性體生成方法 (MNF文件) 
CAE仿真小技巧——HyperWorks生成多體動(dòng)力學(xué)柔性體方法(MNF文件)通過“一二四”法讓大家簡(jiǎn)單學(xué)會(huì)如何快速掌握生成MNF文件。
628 4
【已注銷】 ??? 5年前
分別用hypermesh和motionview生成柔性體的mnf文件 
本課程旨在教會(huì)大家如何生成柔性體的mnf文件,step by step的視頻教學(xué),希望對(duì)大家有所幫助
100 6
風(fēng)輕揚(yáng) ??? 8年前
基于Abaqus/Ansys全平臺(tái)的Simpack車輛-柔性軌道聯(lián)合仿真分析(含視頻教程) 
柔性鋼彈簧浮置板建模:介紹鋼彈簧浮置板的建模方法及其在Abaqus中的實(shí)現(xiàn) 2.Simpack中柔性軌道和柔性體的編寫與生成方法 柔性軌道.Ftr文件編寫:講解如何在Simpack中編寫柔性軌道的.Ftr文件。 柔性體.Fbi文件的生成:介紹通過Abaqus-Simpack接口生成柔性體.Fbi文件的方法。
5466 1
技術(shù)鄰公告 ??? 1年前
基于hypermesh柔性體mnf文件生成(以扭力梁為例) 
介紹了柔性體的創(chuàng)建過程1、 創(chuàng)建柔性體網(wǎng)格2、 創(chuàng)建連接單元3、 創(chuàng)建約束特性()4、 創(chuàng)建約束模態(tài)方法5、 創(chuàng)建分析步6、 求解
34 3
lz1234 ??? 7年前
【技術(shù)貼】基于AVL EXCITE eAxle的全新電驅(qū)總成NVH分析解決方案 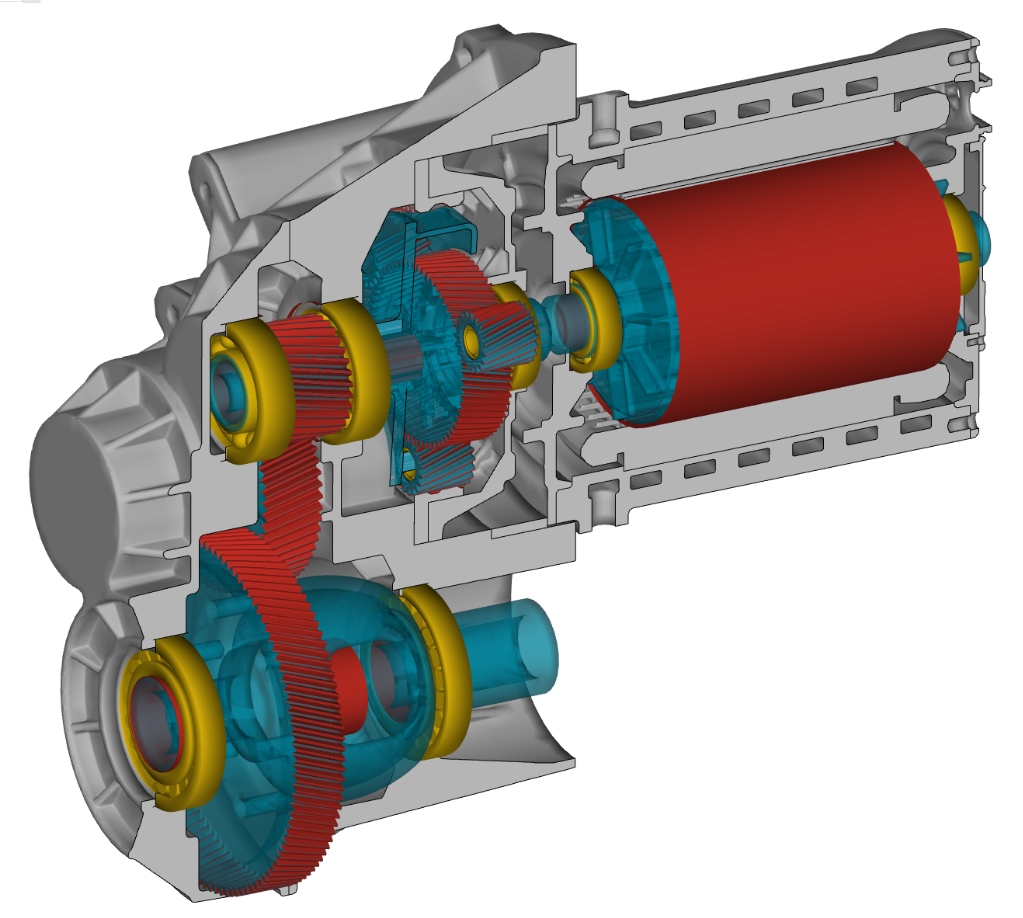
工況引起的沖擊;先進(jìn)的時(shí)域差分求解器,同樣的模型規(guī)模、全柔性體建模、同類型時(shí)域分析軟件中求解速度無(wú)與匹敵;方便進(jìn)行模型擴(kuò)展,除純電電驅(qū)動(dòng)總成外,還可加入發(fā)動(dòng)機(jī)模型進(jìn)行混動(dòng)系統(tǒng)動(dòng)力學(xué)和NVH分析。
4672 4 1
AVL先進(jìn)模擬技術(shù) ??? 3年前
【技術(shù)貼】基于CAMEO與EXCITE實(shí)現(xiàn)電驅(qū)系統(tǒng)齒輪噪聲自動(dòng)優(yōu)化 
圖10 不同諧次振動(dòng)加速度級(jí)齒向鼓型修形以及螺旋角修形范圍選擇為0~12um,結(jié)合CAMEO DOE算法中的索伯序列法(Sobol-Designer)生成所需的40個(gè)case如圖11所示,結(jié)合EXCITE PU對(duì)生成計(jì)算case進(jìn)行相應(yīng)的仿真計(jì)算。
3855 41 46
AVL先進(jìn)模擬技術(shù) ??? 3年前
基于AVL EXCITE M與Simulink控制耦合的電機(jī)諧波注入NVH分析 
圖5 電機(jī)控制模塊案例介紹 本文基于簡(jiǎn)單案例,演示如何通過外部電流控制策略,開展諧波注入對(duì)電驅(qū)系統(tǒng) NVH 特性影響的量化分析。
2502
AVL先進(jìn)模擬技術(shù) ??? 4月前
基于多體動(dòng)力學(xué)的發(fā)動(dòng)機(jī)噪聲預(yù)測(cè)與輕量化 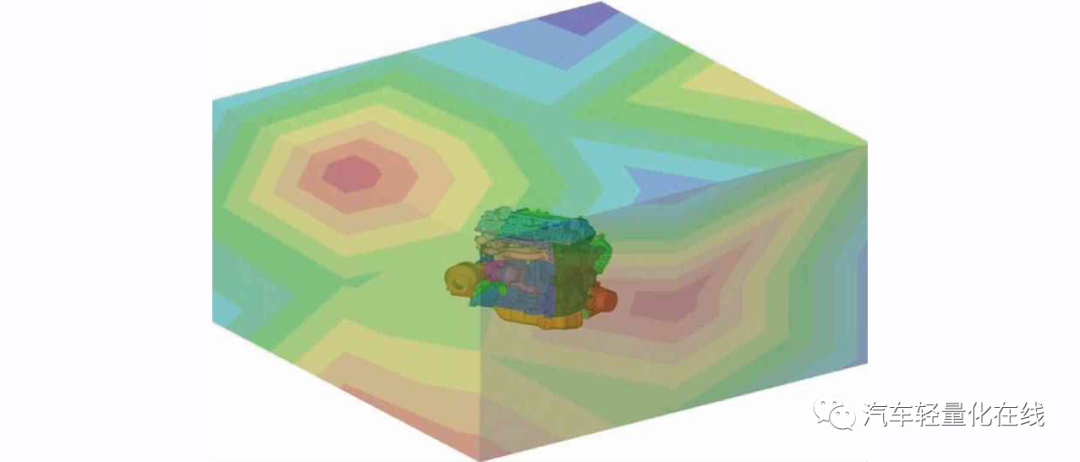
2.2 發(fā)動(dòng)機(jī)多體動(dòng)力學(xué)模型的建立 采用EXCITE-PU 對(duì)曲軸進(jìn)行動(dòng)力學(xué)建模[3-4],以及建立由燃燒激勵(lì)引起發(fā)動(dòng)機(jī)載荷激勵(lì)的多體動(dòng)力學(xué)模型,如圖2 所示。 圖2 發(fā)動(dòng)機(jī)多體動(dòng)力學(xué)模型顯示界面 運(yùn)用EXCITE-PR 對(duì)活塞動(dòng)力學(xué)進(jìn)行建模[5],可提供活塞側(cè)推力激勵(lì)。
2607 1 1
聲學(xué)工程師小吳 ??? 2年前
設(shè)計(jì)仿真 | 深入解析Adams的直接柔性化功能:ViewFlex 
Import Mesh方法該方法可以將bdf或dat文件所描述的網(wǎng)格信息讀入到Adams中,直接輔助于Viewflex流程完成所需柔性體的創(chuàng)建。
2497 1 1
海克斯康設(shè)計(jì)與仿真 ??? 8月前
【技術(shù)貼】基于EXCITE 軟件風(fēng)機(jī)系統(tǒng)動(dòng)力學(xué)仿真 
AVL EXCITE軟件作為一款專業(yè)的多體動(dòng)力學(xué)分析軟件,基于其柔性多體模型與非線性接觸模型,可以詳細(xì)考慮齒輪柔性變形與宏觀及微觀齒輪參數(shù)以及滑動(dòng)軸承彈性液力潤(rùn)滑接觸,用于風(fēng)機(jī)齒輪嚙合分析、滑動(dòng)軸承潤(rùn)滑分析、整機(jī)NVH分析以及可靠性分析等。國(guó)內(nèi)外諸多風(fēng)機(jī)企業(yè)也已將該分析任務(wù)集成到其產(chǎn)品開發(fā)與設(shè)計(jì)中。
2844
AVL先進(jìn)模擬技術(shù) ??? 3年前
Adams剛?cè)狁詈戏桨?amp;柔性體分布載荷施加與應(yīng)用,具柔性特征的部件耦合分析方案講解(7月24日直播) 
基于MSC Nastran生成帶分布載荷的柔性體考慮分布載荷作用下整流罩分離過程的應(yīng)用 在剛?cè)狁詈戏治龅膶?shí)際應(yīng)用中,某些柔性體會(huì)承受分布載荷的作用,通過外部有限元軟件生成柔性體mnf文件時(shí),多數(shù)軟件無(wú)法生成帶分布載荷的柔性體。
2798
技術(shù)鄰公告 ??? 10月前
【技術(shù)貼】基于AVL EXCITE M軟件的PWM逆變器對(duì)電機(jī)噪聲影響分析 
圖10 電機(jī)PI控制過程 AVL EXCITE M由于基于真實(shí)的三維柔性體模型進(jìn)行時(shí)域計(jì)算,可實(shí)現(xiàn)分析對(duì)象的瞬態(tài)與穩(wěn)態(tài)工況仿真。本案例中主要分析電機(jī)恒扭負(fù)載的runup瞬態(tài)工況,對(duì)應(yīng)電機(jī)目標(biāo)轉(zhuǎn)速如圖,電機(jī)逆變器采用SVPWM控制方式,過調(diào)制采用最小幅值誤差策略,開關(guān)頻率采用恒定開關(guān)頻率18000HZ。PWM分辨率為12bit.
3874 21 8
AVL先進(jìn)模擬技術(shù) ??? 2年前

技術(shù)小貼士:如何使用RFlexGen將Beam單元轉(zhuǎn)為RFlex體 
Beam單元(1D單元)可以被轉(zhuǎn)換為RFlex體(僅限于RecurDyn支持的單元類型)。該信息位于“幫助文檔”的“Supporting elements”類別中。 有兩種方法可以使用RFlexGen創(chuàng)建rfi文件。一種是使用外部程序創(chuàng)建的柔性體,并生成rfi文件,另一種是直接通過RecurDyn創(chuàng)建的FFlex柔性體創(chuàng)建。 1.轉(zhuǎn)換外部文件時(shí),支持以下文件類型。
2438 1
杭州擬創(chuàng)(RecurDyn原廠) ??? 1年前
直播預(yù)告 | Adams剛?cè)狁詈戏治龅慕鉀Q方案及柔性體分布載荷施加與應(yīng)用 
基于MSC Nastran生成帶分布載荷的柔性體考慮分布載荷作用下整流罩分離過程的應(yīng)用在剛?cè)狁詈戏治龅膶?shí)際應(yīng)用中,某些柔性體會(huì)承受分布載荷的作用,通過外部有限元軟件生成柔性體mnf文件時(shí),多數(shù)軟件無(wú)法生成帶分布載荷的柔性體。而MSC Nastran則可以直接生成帶有分布載荷的柔性體,然后導(dǎo)入Adams中通過建立模態(tài)力實(shí)現(xiàn)分布載荷的施加,這就為此類問題提供了關(guān)鍵、高效的解題思路。
2840
海克斯康設(shè)計(jì)與仿真 ??? 10月前
基于AVL EXCITE M軟件的PWM逆變器對(duì)電機(jī)噪聲影響分析 
圖10 電機(jī)PI控制過程 AVL EXCITE M由于基于真實(shí)的三維柔性體模型進(jìn)行時(shí)域計(jì)算,可實(shí)現(xiàn)分析對(duì)象的瞬態(tài)與穩(wěn)態(tài)工況仿真。本案例中主要分析電機(jī)恒扭負(fù)載的runup瞬態(tài)工況,對(duì)應(yīng)電機(jī)目標(biāo)轉(zhuǎn)速如圖,電機(jī)逆變器采用SVPWM控制方式,過調(diào)制采用最小幅值誤差策略,開關(guān)頻率采用恒定開關(guān)頻率18000HZ。
2467 1 1
聲學(xué)工程師小吳 ??? 2年前
Adams中的柔性體接觸 
Flex Body Contact in ADAMS 摘要描述了采用C++求解器計(jì)算柔性體接觸的方法。Fortran 求解器不支持柔性接觸。3D柔性接觸在MD R3這個(gè)版本中首次引進(jìn)。這個(gè)版本僅支持使用solid單元的柔性體接觸。MD R4版本將會(huì)支持使用shell單元的2D及3D柔性接觸。1 介紹柔性體的接觸公式是以柔性體是模態(tài)文件為基礎(chǔ)的。
5524 5 3
peaky ??? 3年前
20條/頁(yè) 
 17
17 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
