



plc控制步進(jìn)電機(jī)邏輯思路 
步進(jìn)電機(jī)能響應(yīng)而不失步的最高步進(jìn)頻率稱為“啟動(dòng)頻率”;與此類似,“停止頻率”是指系統(tǒng)控制信號(hào)突然關(guān)斷,步進(jìn)電機(jī)不沖過(guò)目標(biāo)位置的最高步進(jìn)頻率。而電機(jī)的啟動(dòng)頻率、停止頻率和輸出轉(zhuǎn)矩都要和負(fù)載的轉(zhuǎn)動(dòng)慣量相適應(yīng)。有了這些數(shù)據(jù),就能有效地對(duì)步進(jìn)電機(jī)進(jìn)行變速控制。 采用PLC控制步進(jìn)電機(jī),應(yīng)根據(jù)下式計(jì)算系統(tǒng)的脈沖當(dāng)量、脈沖頻率上限和最大脈沖數(shù)量,進(jìn)而選擇PLC及其相應(yīng)的功能模塊。
2192
工控PLC學(xué)習(xí) ??? 4年前
步進(jìn)電機(jī)工作原理與運(yùn)動(dòng)控制基礎(chǔ)
這種系統(tǒng)通過(guò)傳感器實(shí)時(shí)監(jiān)測(cè)電機(jī)的位置信息,并與設(shè)定的目標(biāo)位置進(jìn)行比較。當(dāng)實(shí)際位置與目標(biāo)位置存在偏差時(shí),控制系統(tǒng)會(huì)調(diào)整脈沖數(shù)量或頻率,以消除偏差并達(dá)到目標(biāo)位置。 方向控制 步進(jìn)電機(jī)的方向控制是通過(guò)改變輸入脈沖信號(hào)的相序來(lái)實(shí)現(xiàn)的。當(dāng)相序改變時(shí),定子磁極的磁場(chǎng)方向也會(huì)改變,從而使轉(zhuǎn)子磁極向相反的方向轉(zhuǎn)動(dòng)。
2592 1
MISUMI米 ??? 2年前
【米思米機(jī)械設(shè)備知識(shí)分享】- 在性能上伺服電機(jī)和步進(jìn)電機(jī)有哪些區(qū)別 
步進(jìn)電機(jī)是一種離散運(yùn)動(dòng)的裝置,在目前國(guó)內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電機(jī)的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機(jī)也越來(lái)越多地應(yīng)用于數(shù)字控制系統(tǒng)中。雖然兩者在控制方式上相似(脈沖串和方向信號(hào)),但在使用性能和應(yīng)用場(chǎng)合上存在著較大的差異。
2649
MISUMI米 ??? 3年前
基于Simulink環(huán)境的永磁同步電機(jī)控制仿真系統(tǒng)的介紹 

本講結(jié)合實(shí)例介紹基于simulink 環(huán)境的電機(jī)系統(tǒng)建模,主要內(nèi)容如下: PMSM-Inveter 閉環(huán)控制系統(tǒng)介紹 結(jié)合實(shí)驗(yàn)數(shù)據(jù)的永磁同步電機(jī)模型建立 采用數(shù)學(xué)模型對(duì)Inverter進(jìn)行精準(zhǔn)建模 控制器算法建模與基于仿真的早期驗(yàn)證 利用matlab 簡(jiǎn)化處理實(shí)驗(yàn)與仿真數(shù)據(jù)
1364
冬日里的暖陽(yáng) ??? 4年前
步進(jìn)電機(jī)的特點(diǎn)、選型方法以及型號(hào)參數(shù)說(shuō)明 
2、步進(jìn)電機(jī)的特點(diǎn)步進(jìn)電機(jī)工作時(shí)的位置和速度信號(hào)不反饋給控制系統(tǒng),如果電機(jī)工作時(shí)的位置和速度信號(hào)反饋給控制系統(tǒng),那么它就屬于伺服電機(jī)。相對(duì)于伺服電機(jī),步進(jìn)電機(jī)的控制相對(duì)簡(jiǎn)單,但不適用于精度要求較高的場(chǎng)合。步進(jìn)電機(jī)的優(yōu)點(diǎn)和缺點(diǎn)都非常的突出,優(yōu)點(diǎn)集中于控制簡(jiǎn)單、精度高,缺點(diǎn)是噪聲、震動(dòng)和效率,它沒(méi)有累積誤差,結(jié)構(gòu)簡(jiǎn)單,使用維修方便,制造成本低。
2824
非標(biāo)機(jī)械論壇 ??? 3年前
【米思米工業(yè)產(chǎn)品知識(shí)分享】- 步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別和工作原理 
步進(jìn)電機(jī)工作原理:通過(guò)控制電脈沖可以實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的轉(zhuǎn)向、速度和旋轉(zhuǎn)角度的控制;伺服電機(jī)工作原理:驅(qū)動(dòng)控制對(duì)象。被控對(duì)象受信號(hào)電壓大小和極性控制,電機(jī)的轉(zhuǎn)動(dòng)速度和方向也跟著變化。 步進(jìn)電機(jī)基于最基本的電磁鐵原理,它是一種可以自由回轉(zhuǎn)的電磁鐵,步進(jìn)電機(jī)動(dòng)作原理是依靠氣隙磁導(dǎo)的變化來(lái)產(chǎn)生電磁轉(zhuǎn)矩。當(dāng)電流流過(guò)定子繞組時(shí),定子繞組產(chǎn)生一矢量磁場(chǎng)。
1963
MISUMI米 ??? 3年前
伺服電機(jī)和步進(jìn)電機(jī)的區(qū)別 
,5,交流伺服驅(qū)動(dòng)系統(tǒng)為閉環(huán)控制,驅(qū)動(dòng)器可直接對(duì)電機(jī)編碼器反饋信號(hào)進(jìn)行采樣,內(nèi)部構(gòu)成位置環(huán)和速度環(huán),一般不會(huì)出現(xiàn)步進(jìn)電機(jī)的丟步或過(guò)沖的現(xiàn)象,控制性能更為可靠。伺服電機(jī)是閉環(huán)系統(tǒng),伺服驅(qū)動(dòng)器可以自動(dòng)修正丟失的脈沖,在堵轉(zhuǎn)時(shí)也可以及時(shí)給控制器反饋,而步進(jìn)電機(jī)是開(kāi)環(huán)系統(tǒng),必須通過(guò)足夠的力矩余量來(lái)避免堵轉(zhuǎn)。6,步進(jìn)電機(jī)和伺服電機(jī)速度響應(yīng)性能不同。
2971 1
工廠物流自動(dòng)化 ??? 4年前
降低步進(jìn)電機(jī)振動(dòng)、噪音的解決方法 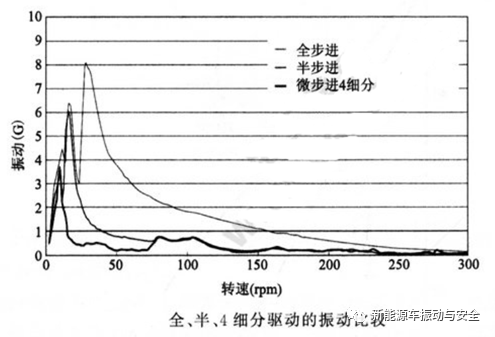
本文轉(zhuǎn)載自電子發(fā)燒友描述步進(jìn)電機(jī)具有結(jié)構(gòu)簡(jiǎn)單、易于控制、安全性高、成本低、轉(zhuǎn)矩高等優(yōu)點(diǎn),作為一種高性能的數(shù)字化電氣元件,廣泛應(yīng)用于各種類型的開(kāi)環(huán)控制系統(tǒng)中。然而,步進(jìn)電機(jī)有一個(gè)缺點(diǎn),在簡(jiǎn)單的開(kāi)環(huán)設(shè)計(jì)中,它可以在低速產(chǎn)生噪聲。噪聲和共振主要來(lái)源于驅(qū)動(dòng)電路和機(jī)械結(jié)構(gòu)的共振。
2783
聲學(xué)工程師小吳 ??? 2年前
步進(jìn)電機(jī)知識(shí)詳解,再不怕看不懂步進(jìn)電機(jī)了! 
在不借助帶位置感應(yīng)的閉環(huán)反饋控制系統(tǒng)的情況下、 使用步進(jìn)電機(jī)與其配套的驅(qū)動(dòng)器共同組成的控制簡(jiǎn)便、 低成本的開(kāi)環(huán)控制系統(tǒng), 就可以實(shí)現(xiàn)精確的位置和速度控制。
2088 1
電氣分享社區(qū) ??? 3年前
每個(gè)H橋可提供輸出電流1.6A的雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器-SS8812T 
雙通道H橋電流控制電機(jī)驅(qū)動(dòng)器是一種電子電路,用于獨(dú)立控制兩個(gè)直流電機(jī)的方向、速度和制動(dòng)。它基于H橋拓?fù)浣Y(jié)構(gòu),每個(gè)通道包含四個(gè)開(kāi)關(guān)元件(如MOSFET或晶體管),形成一個(gè)“H”形電路,電機(jī)作為負(fù)載連接在橋臂上。?雙通道設(shè)計(jì)允許同時(shí)控制兩個(gè)電機(jī),每個(gè)通道獨(dú)立工作。例如,一個(gè)通道控制電機(jī)1,另一個(gè)控制電機(jī)2,通過(guò)各自的PWM信號(hào)和方向控制實(shí)現(xiàn)多軸運(yùn)動(dòng)(如機(jī)器人輪子驅(qū)動(dòng))。?
2443
如果我年少有為 ??? 5月前
用于無(wú)刷直流電機(jī)的汽車電動(dòng)直流電機(jī)控制器的工作原理 
開(kāi)環(huán)和閉環(huán)系統(tǒng)是控制理論的基本概念。根據(jù)電子設(shè)備的要求或復(fù)雜性,您可以實(shí)施帶或不帶反饋的控制系統(tǒng)。例如,步進(jìn)電機(jī)可以與開(kāi)環(huán)控制器一起運(yùn)行。用于高性能應(yīng)用中精確定位的伺服直流電機(jī)控制器是一個(gè)閉環(huán)系統(tǒng)。圖中顯示了閉環(huán)和開(kāi)環(huán)控制系統(tǒng)的示例。在第一種情況下,機(jī)器人的電機(jī)控制器接收反饋并根據(jù)景觀條件調(diào)節(jié)速度。在非反饋系統(tǒng)的情況下,電機(jī)控制器得不到反饋。因此,機(jī)器人的速度在到達(dá)平臺(tái)時(shí)會(huì)降低。
2400
博揚(yáng)智能 ??? 1年前
機(jī)器人/舞臺(tái)燈常用電機(jī)驅(qū)動(dòng)控制芯片SS6810R 
所采用的關(guān)節(jié)驅(qū)動(dòng)電動(dòng)機(jī)主要是AC伺服電動(dòng)機(jī),步進(jìn)電動(dòng)機(jī)和DC伺服電動(dòng)機(jī)。(圖片來(lái)源:無(wú)版權(quán)圖庫(kù))其中,交流伺服電動(dòng)機(jī)、直流伺服電動(dòng)機(jī)、直接驅(qū)動(dòng)電動(dòng)機(jī)(DD)均采用位置閉環(huán)控制,一般應(yīng)用于高精度、高速度的機(jī)器人驅(qū)動(dòng)系統(tǒng)中。步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)系統(tǒng)多適用于對(duì)精度、速度要求不高的小型簡(jiǎn)易機(jī)器人開(kāi)環(huán)系統(tǒng)中。交流伺服電動(dòng)機(jī)由于采用電子換向,無(wú)換向火花,在易燃易爆環(huán)境中得到了廣泛的使用。
2193
工采電子 ??? 3年前
舞臺(tái)燈光專用電機(jī)驅(qū)動(dòng)及應(yīng)用方案 
繞組電流控制允許外部控制器調(diào)整提供給電機(jī)的可調(diào)電流。電流調(diào)整是高度可配置的,以及根據(jù)應(yīng)用程序的要求選擇三種衰變模式:快、慢和混合衰減。兩位電流電平控制允許在四種不同電流電平之間切換。當(dāng)電機(jī)不工作時(shí),采用低功耗的睡眠模式允許系統(tǒng)節(jié)省功耗。
2053
工采電子 ??? 2年前
【伺服電機(jī)特點(diǎn)及未來(lái)發(fā)展方向】- 米思米機(jī)械設(shè)備知識(shí)分享 
1、開(kāi)環(huán)系統(tǒng)開(kāi)環(huán)系統(tǒng),它主要由驅(qū)動(dòng)電路,執(zhí)行元件和機(jī)床3大部分組成。常用的執(zhí)行元件是步進(jìn)電機(jī),通常稱以步進(jìn)電機(jī)作為執(zhí)行元件的開(kāi)環(huán)系統(tǒng)為步進(jìn)式伺服系統(tǒng),在這種系統(tǒng)中,如果是大功率驅(qū)動(dòng)時(shí),用步進(jìn)電機(jī)作為執(zhí)行元件。驅(qū)動(dòng)電路的主要任務(wù)是將指令脈沖轉(zhuǎn)化為驅(qū)動(dòng)執(zhí)行元件所需的信號(hào)。 2閉環(huán)系統(tǒng)閉環(huán)系統(tǒng)主要由執(zhí)行元件、檢測(cè)單元、比較環(huán)節(jié)、驅(qū)動(dòng)電路和機(jī)床5部分組成。
2344
MISUMI米 ??? 2年前
MS35541完美替代TMC5041 雙驅(qū)運(yùn)動(dòng)控制步進(jìn)芯片 靜音高效 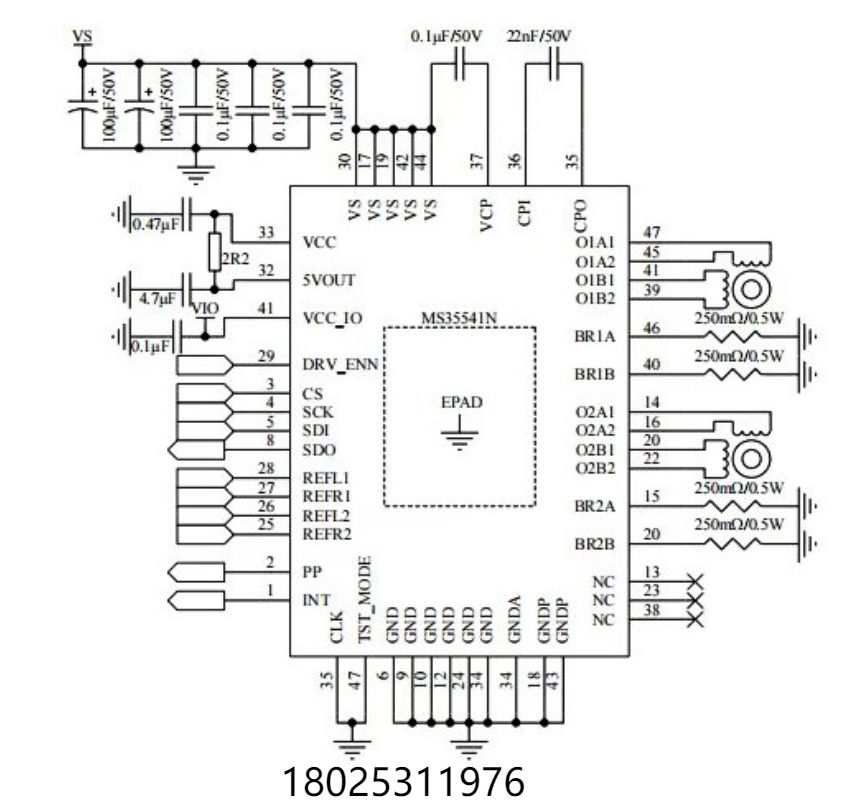
超靜音兩相步進(jìn)電機(jī)驅(qū)動(dòng)芯片—MS35541這款高集成度芯片不僅延續(xù)了家族優(yōu)異的靜音和運(yùn)動(dòng)控制性能,更實(shí)現(xiàn)了單芯片同時(shí)驅(qū)動(dòng)兩個(gè)步進(jìn)電機(jī),支持獨(dú)立配置與運(yùn)動(dòng)控制,為多軸應(yīng)用帶來(lái)更簡(jiǎn)潔、高效的解決方案。
2185
用戶_122856 ??? 8月前
基于機(jī)械系統(tǒng)動(dòng)力學(xué)自動(dòng)分析的多噴頭3D打印機(jī)運(yùn)動(dòng)學(xué)研究 
橫向架梁伸縮運(yùn)動(dòng)機(jī)構(gòu)采用步進(jìn)電機(jī)加上絲杠的驅(qū)動(dòng)模塊,可以有效保證此方向的打印精度與速度。在運(yùn)動(dòng)的過(guò)程中,這個(gè)結(jié)構(gòu)中的絲杠受力最大,在下面基于ADAMS的力學(xué)仿真中會(huì)有分析。Z軸依舊采用步進(jìn)電機(jī)和絲杠的驅(qū)動(dòng)模塊。兩邊擋板為承重板,并且可以有效地與上面料架機(jī)構(gòu)連接。上方的料盤可以放置打印耗材,下方的支架則是起到支撐作用,并連接到Z軸運(yùn)動(dòng)機(jī)構(gòu)上。
4501 4
擺渡人張 ??? 2年前
基于PLC的閥門生產(chǎn)線控制系統(tǒng)設(shè)計(jì)與仿真分析 
[6] 楊振波.基于PLC的自動(dòng)化包裝生產(chǎn)線集成控制系統(tǒng)設(shè)計(jì)[J].自動(dòng)化技術(shù)與應(yīng)用,2022(4):5-6.[7] 馮玉龍,李楊.基于PLC和MCGS工控組態(tài)軟件的空氣壓縮機(jī)自動(dòng)控制系統(tǒng)設(shè)計(jì)[J].現(xiàn)代電子技術(shù),2021,44(13):111-114.[8] 曾明輝,談宏華.基于PLC的連續(xù)氧化過(guò)程控制系統(tǒng)設(shè)計(jì)[J].自動(dòng)化與儀表,2021,36(4):35-39.
4351 4 1
機(jī)械工程師 ??? 2年前
1分鐘帶你了解PLC編程算法 
脈沖量的計(jì)算 脈沖量的控制多用于步進(jìn)電機(jī)、伺服電機(jī)的角度控制、距離控制、位置控制等。以下是以步進(jìn)電機(jī)為例來(lái)說(shuō)明各控制方式。1、 步進(jìn)電機(jī)的角度控制。首先要明確步進(jìn)電機(jī)的細(xì)分?jǐn)?shù),然后確定步進(jìn)電機(jī)轉(zhuǎn)一圈所需要的總脈沖數(shù)。
1882 1 1
工控PLC學(xué)習(xí) ??? 4年前
FPGA開(kāi)發(fā)必須知道的五件事 
目前,主流的FPGA廠商如賽靈思(Xilinx)和英特爾(Intel)已經(jīng)推出了基于7nm和10nm工藝的FPGA產(chǎn)品,未來(lái)還有望進(jìn)入5nm甚至3nm工藝。 第二,系統(tǒng)級(jí)集成的需求:隨著應(yīng)用領(lǐng)域的不斷拓展,FPGA需要與其他類型的芯片進(jìn)行系統(tǒng)級(jí)集成,以提供更強(qiáng)大和更靈活的功能。
2061
蘇格不拉底 ??? 3年前
一篇全解:電機(jī)的旋轉(zhuǎn)原理、結(jié)構(gòu)、類型、故障排除 
在不借助帶位置感應(yīng)的閉環(huán)反饋控制系統(tǒng)的情況下、 使用步進(jìn)電機(jī)與其配套的驅(qū)動(dòng)器共同組成的控制簡(jiǎn)便、 低成本的開(kāi)環(huán)控制系統(tǒng), 就可以實(shí)現(xiàn)精確的位置和速度控制。
6094 2
電氣分享社區(qū) ??? 3年前
20條/頁(yè) 
 31
31 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
