



plc控制步進電機邏輯思路 
步進電機能響應而不失步的最高步進頻率稱為“啟動頻率”;與此類似,“停止頻率”是指系統控制信號突然關斷,步進電機不沖過目標位置的最高步進頻率。而電機的啟動頻率、停止頻率和輸出轉矩都要和負載的轉動慣量相適應。有了這些數據,就能有效地對步進電機進行變速控制。 采用PLC控制步進電機,應根據下式計算系統的脈沖當量、脈沖頻率上限和最大脈沖數量,進而選擇PLC及其相應的功能模塊。
2191
工控PLC學習 ??? 4年前
西門子PLC集成脈沖輸出通過步進電機進行定位控制 
關于定位控制(Positioning,調節(Regulated)和控制(Controlled)操作之間存在一些區別。步進電機小需要連續的位置控制,而在控制操作中得到應用。在以下的程序例子中,借助于CPU214所產生的集成脈沖輸出,通過步進電機來實現相對的位置控制。雖然這種類型的定位控制小需要參考點,本例還是初略地描述了確定參考點的簡單步驟。
2266
工控PLC學習 ??? 3年前
步進電機工作原理與運動控制基礎
步距角的大小取決于電機的設計和制造精度。通過控制定子磁極的電流方向和大小,可以控制步進電機的轉動方向和轉動角度。 步進電機的運動控制基礎 步進電機的運動控制主要包括速度控制、位置控制和方向控制。這些控制方法基于步進電機的工作原理和特性,通過控制輸入的電脈沖信號來實現。
2588 1
MISUMI米 ??? 2年前
3種伺服電機控制方式,很多PLC工程師都不了解! 
對運動中的動態性能有比較高的要求時,需要實時對電機進行調整。 如果控制器本身的運算速度很慢(比如PLC,或低端運動控制器),就用位置方式控制。
1969 1
電工電氣一網通 ??? 4年前
1分鐘帶你了解PLC編程算法 
模擬量控制包括:反饋控制、前饋控制、比例控制、模糊控制等。這些都是PLC內部數字量的計算過程。3、 脈沖量是其取值總是不斷的在0(低電平)和1(高電平)之間交替變化的數字量。每秒鐘脈沖交替變化的次數稱為頻率。PLC脈沖量的控制目的主要是位置控制、運動控制、軌跡控制等。例如:脈沖數在角度控制中的應用。步進電機驅動器的細分是每圈10000,要求步進電機旋轉90度。
1881 1 1
工控PLC學習 ??? 4年前
PLC工程師都應了解的3種伺服電機控制方式 
對運動中的動態性能有比較高的要求時,需要實時對電機進行調整。 如果控制器本身的運算速度很慢(比如PLC,或低端運動控制器),就用位置方式控制。
2087
跟我學PLC ??? 4年前
PLC編程的3大量,搞懂了再說學PLC 
PLC脈沖量的控制目的主要是位置控制、運動控制、軌跡控制等。例如:脈沖數在角度控制中的應用。步進電機驅動器的細分是每圈10000,要求步進電機旋轉90度。
1853
電工電氣一網通 ??? 4年前
3個PLC編程算法,分享這個有點心疼(入門知識) 
PLC編程算法(3)——脈沖量的計算 脈沖量的控制多用于步進電機、伺服電機的角度控制、距離控制、位置控制等。以下是以步進電機為例來說明各控制方式。1、 步進電機的角度控制。
1971
電力講壇 ??? 4年前
1分鐘帶你了解PLC編程算法
PLC編程算法(3) 脈沖量的計算 脈沖量的控制多用于步進電機、伺服電機的角度控制、距離控制、位置控制等。以下是以步進電機為例來說明各控制方式。 1、 步進電機的角度控制。首先要明確步進電機的細分數,然后確定步進電機轉一圈所需要的總脈沖數。
1976
工控PLC學習 ??? 4年前
PLC編程的3大量:開關量、模擬量、脈沖量 
PLC編程算法 脈沖量的計算 脈沖量的控制多用于步進電機、伺服電機的角度控制、距離控制、位置控制等。以下是以步進電機為例來說明各控制方式。1、 步進電機的角度控制。首先要明確步進電機的細分數,然后確定步進電機轉一圈所需要的總脈沖數。
2029
電工學習一點通 ??? 3年前
PLC最全編程算法,收藏備用 
PLC編程算法(3)-脈沖量的計算 脈沖量的控制多用于步進電機,伺服電機的角度控制,距離控制,位置控制等。以下由步進電機為例來說明各控制方式。 1,步進電機的角度控制。
2310
工控PLC學習 ??? 4年前
西門子1200PLC實用定位控制程序案例 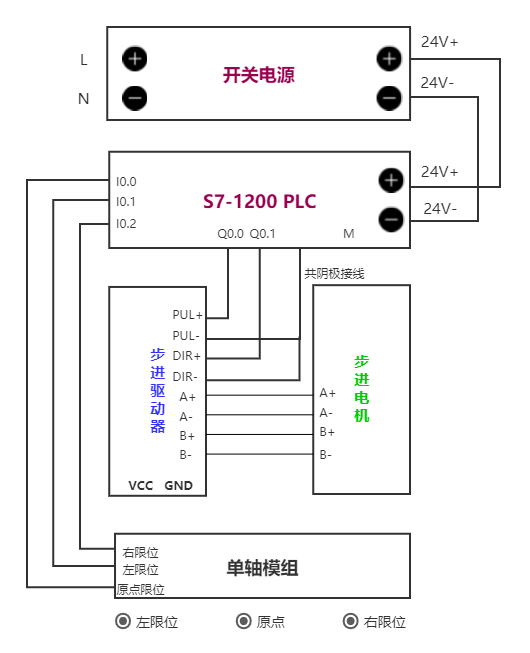
項目開發平臺采用西門子TIA Portal V15編程軟件編寫運動控制程序,實現PLC(S7-1200系列:CPU1214C DC/DC/DC )對步進電機的控制,再通過編寫ModbusTCP程序,將控制地址進行映射,從而方便上位機(VS 2019開發)與PLC進行通信,最終實現步進電機的運動方向、速度及距離的靈活控制。
4504
跟我學PLC ??? 3年前
【米思米機械設備知識分享】- 在性能上伺服電機和步進電機有哪些區別 
根據伺服電機和步進電機的性能有以下區別 1.控制精度不同步進電機步距角一般為3.6°、1.8°,五相混合式步進電機步距角一般為0.72°、0.36°交流伺服電機的控制精度由電機軸后端的旋轉編碼器保證 2.低頻特性不同步進電機在低速時易出現低頻振動現象。這種由步進電機的工作原理所決定的低頻振動現象對于機器的正常運轉非常不利。
2648
MISUMI米 ??? 3年前
運動控制器與PLC的本質區別,你知道嗎? 
運動控制器與PLC的區別 運動控制主要涉及步進電機、伺服電機的控制,控制結構模式一般是:控制裝置+驅動器+(步進或伺服)電機。 控制裝置可以是PLC系統,也可以是專用的自動化裝置(如運動控制器、運動控制卡)。
2233
非標機械論壇 ??? 4年前
步進電機的特點、選型方法以及型號參數說明 
2、步進電機的特點步進電機工作時的位置和速度信號不反饋給控制系統,如果電機工作時的位置和速度信號反饋給控制系統,那么它就屬于伺服電機。相對于伺服電機,步進電機的控制相對簡單,但不適用于精度要求較高的場合。步進電機的優點和缺點都非常的突出,優點集中于控制簡單、精度高,缺點是噪聲、震動和效率,它沒有累積誤差,結構簡單,使用維修方便,制造成本低。
2824
非標機械論壇 ??? 3年前
【米思米機械設備知識分享】- 減速電機和步進電機哪個好有什么區別? 
改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
1997
MISUMI米 ??? 3年前
【米思米工業產品知識分享】- 步進電機和伺服電機的區別和工作原理 
步進電機工作原理:通過控制電脈沖可以實現對步進電機的轉向、速度和旋轉角度的控制;伺服電機工作原理:驅動控制對象。被控對象受信號電壓大小和極性控制,電機的轉動速度和方向也跟著變化。 步進電機基于最基本的電磁鐵原理,它是一種可以自由回轉的電磁鐵,步進電機動作原理是依靠氣隙磁導的變化來產生電磁轉矩。當電流流過定子繞組時,定子繞組產生一矢量磁場。
1962
MISUMI米 ??? 3年前
步進電機知識詳解,再不怕看不懂步進電機了! 
步進電機是一種直接將電脈沖轉化為機械運動的機電裝置, 通過控制施加在電機線圈上的電脈沖順序、 頻率和數量, 可以實現對步進電機的轉向、 速度和旋轉角度的控制。
2088 1
電氣分享社區 ??? 3年前
基于PLC的閥門生產線控制系統設計與仿真分析 
并將其作為反饋,使PLC不斷優化控制,最終高效率、高精度地完成閥門產品的加工。2 閥門生產線控制系統的硬件設計2.1 伺服電機與驅動器的設計伺服電機系統是閥門生產線控制系統的核心組成,也是實現閥門自動化生產的關鍵。在PLC下達指令后,該指令經過轉換、放大等處理,最終控制伺服裝置和機械傳動裝置,共同配合完成閥門加工任務。
4350 4 1
機械工程師 ??? 2年前
降低步進電機振動、噪音的解決方法 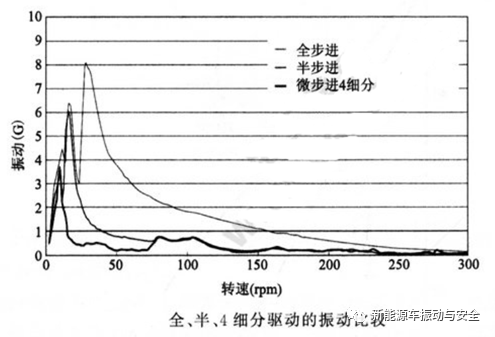
本文轉載自電子發燒友描述步進電機具有結構簡單、易于控制、安全性高、成本低、轉矩高等優點,作為一種高性能的數字化電氣元件,廣泛應用于各種類型的開環控制系統中。然而,步進電機有一個缺點,在簡單的開環設計中,它可以在低速產生噪聲。噪聲和共振主要來源于驅動電路和機械結構的共振。
2779
聲學工程師小吳 ??? 2年前
20條/頁 
 11
11 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
