



基于多工況加權(quán)柔度響應(yīng)的汽車控制臂拓?fù)鋬?yōu)化 
概述汽車控制臂(Control Arm)是懸架系統(tǒng)的關(guān)鍵部件,其核心作用是將車輪與車架連接,并在車輛行駛過程中承受并傳遞來自車輪的多方向力和力矩。拓?fù)鋬?yōu)化的目標(biāo)是在給定的設(shè)計空間、材料和工況下,找到材料的最優(yōu)分布,使結(jié)構(gòu)在滿足多種性能要求(如剛度、強度、頻率)的同時,實現(xiàn)輕量化。
625
320科技工作室 ??? 5天前
【技術(shù)帖】基于架構(gòu)開發(fā)的汽車懸架控制臂優(yōu)化設(shè)計 
摘要:為有效解決汽車架構(gòu)開發(fā)中懸架控制臂的疲勞耐久問題,研究了某架構(gòu)項目后懸架下控制臂的設(shè)計優(yōu)化方法。
3158
肥皂寶寶 ??? 4年前
基于optistruct汽車控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化案例 
本例以汽車控制臂三種工況、加上1階模態(tài)下的多目標(biāo)拓?fù)鋬?yōu)化為例,講述在optistruct中是如何進行多目標(biāo)拓?fù)鋬?yōu)化,非公式,目的就是快速得到傳遞路徑,與傳統(tǒng)輸入公式傳遞路徑基本上百分九十以上的相似度,如果有需要公式方面的同學(xué)也可以聯(lián)系我,有相關(guān)的資料購買后對于模型中不懂的地方都可以問
2225 1 9
lz1234 ??? 3年前
基于optistruct汽車控制臂多工況拓?fù)鋬?yōu)化 

汽車控制臂三種工況下的多目標(biāo)拓?fù)鋬?yōu)化為例,講述在optistruct中是如何進行多目標(biāo)拓?fù)鋬?yōu)化,從而滿足特定要求下汽車控制臂的概念設(shè)計。對于單目標(biāo)拓?fù)鋬?yōu)化你會發(fā)現(xiàn)每一種工況下拓?fù)鋬?yōu)化的結(jié)果不一樣,多目標(biāo)拓?fù)鋬?yōu)化則綜合考慮多種工況下的目標(biāo)得到一個綜合結(jié)果。 對于多目標(biāo)優(yōu)化常用的手段:1、將目標(biāo)轉(zhuǎn)化為約束條件;2、對多目標(biāo)采用加權(quán)的方法得到一個綜合目標(biāo)。
1073 9
CAE行路人 ??? 6年前
增強現(xiàn)實場景下基于穩(wěn)態(tài)視覺誘發(fā)電位的機械臂控制系統(tǒng) 
控制主機安裝Ubuntu16.04系統(tǒng)和機器人操作系統(tǒng)(Robot Operating System,ROS)。機械臂的驅(qū)動程序和運動控制程序均部署在ROS上。在ROS中,除了機械臂原有的節(jié)點外,還包括AR-BCI系統(tǒng)發(fā)布的節(jié)點,用于向機械臂發(fā)送控制命令及接收機械臂狀態(tài)信息。
2576 1
機械設(shè)計師 ??? 4年前
Adams比利時路面控制臂動態(tài)載荷分解&Hyperworks控制臂疲勞壽命仿真分析實例視頻教程 
本課程分為兩節(jié):第一節(jié)介紹了利用adams軟件,以24通道輪心力作為輸入,來分解比利時路面上控制臂的動態(tài)載荷的詳細(xì)方法過程;第二節(jié)介紹了利用hyperworks軟件,基于第一節(jié)提取的動態(tài)載荷,來仿真分析比利時路面上控制臂的疲勞壽命。
1620 1
辰巳午未 ??? 2年前
基于Hyperworks+Abaqus控制臂模態(tài)分析/自重分析 
本案例是基于hyperworks/abaqus汽車控制臂模態(tài)分析/自重分析,重點在于說明如何在hyperworks/abaqus中完成前處理(部件建立、網(wǎng)格劃分、材料創(chuàng)建、屬性定義、模態(tài)分析設(shè)置、約束設(shè)置、重力場設(shè)置、ABAQUS中質(zhì)量點添加等),接著導(dǎo)出inp模型文件并在abaqus中進行求解計算,abaqus只是扮演一個求解器的角色,hyperview中進行后處理。
4118 7 5
CAE追夢者 ??? 4年前
基于hyperworks&abaqus的考慮初始缺陷的懸架控制臂后屈曲仿真分析實例視頻教程 
本課程詳細(xì)介紹了如何使用hyperworks和abaqus兩個軟件,去仿真計算考慮了初始缺陷的后懸架控制臂的非線性buckling force值,主要包含三個內(nèi)容:1、如何利用hyperworks進行控制臂本體的網(wǎng)格劃分;2、如何在不打開abaqus軟件的前提下,使用簡單命令調(diào)用abaqus求解器,來求解線性屈曲載荷;3、如何引入產(chǎn)品的初始缺陷,來求解控制臂本身的非線性buckling force
1010
辰巳午未 ??? 2年前
面向自動駕駛:四輪獨立驅(qū)動/轉(zhuǎn)向電動汽車配置與控制綜述與展望 
相比于燭式懸架和縱臂式懸架,雙叉臂懸架有更好的橫向剛度和側(cè)傾剛度,有利于提升車輛在側(cè)向加速度較大的情況下的安全性。從表1可以看出,ROboMObil的設(shè)計速度100 km/h是所有原型車中是最大的。
3823
駕駛哥 ??? 4年前
淺析純電動汽車驅(qū)動電機控制系統(tǒng)的控制過程 
純電動汽車的使用已經(jīng)走進我們的生活,它已成為當(dāng)前這一時期汽車的典型轉(zhuǎn)型。純電動汽車從結(jié)構(gòu)上來說主要體現(xiàn)在動力總成控制系統(tǒng)、電機控制系統(tǒng)和電池及其管理系統(tǒng)三個方面。從工作原理上來講,純電動汽車主要是通過高壓蓄電池直接供電,再由驅(qū)動電機控制模塊控制汽車驅(qū)動電機起動運轉(zhuǎn)。本文主要對純電動汽車電機的結(jié)構(gòu)、電機控制系統(tǒng)過程進行分析。
2882
洋娃娃和小熊 ??? 4年前
純電動汽車整車控制器原理及功能解析 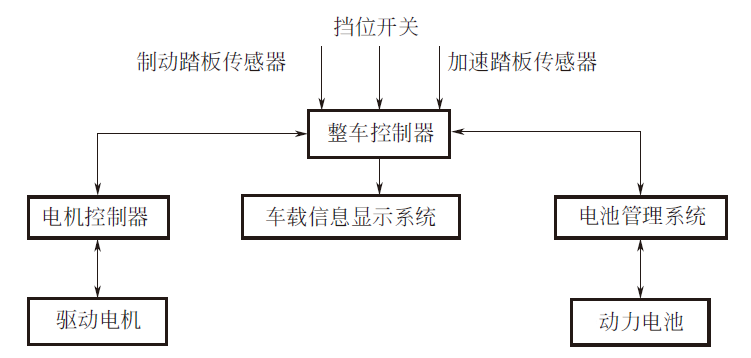
整車控制器是電動汽車正常行駛的控制中樞,是整車控制系統(tǒng)的核心部件,是純電動汽車的正常行駛、再生制動能量回收、故障診斷處理和車輛狀態(tài)監(jiān)視等功能的主要控制部件。整車控制器包括硬件和軟件兩大組成部分,它的核心軟件和程序一般由生產(chǎn)廠商研發(fā),而汽車零部件供應(yīng)商能夠提供整車控制器硬件和底層驅(qū)動程序。現(xiàn)階段國外對純電動汽車整車控制器的研究主要集中在以輪轂電機驅(qū)動的純電動汽車。
2752 2
汽車公社 ??? 3年前
汽車電子控制系統(tǒng)及其發(fā)展趨勢 
即使在發(fā)動機啟動工況等使汽車蓄電池電壓有較大波動時,也能提供+5v的穩(wěn)定電壓,從而保證系統(tǒng)的正常工作,而電動汽車一般由蓄電池供電。 在軟件方面,ECU的控制程序有以下幾個方面:計算、控制、監(jiān)測與診斷、管理、監(jiān)控。
1977
木火柴 ??? 4年前
新能源電動汽車電動汽車驅(qū)動電機控制器結(jié)構(gòu)與功能 
一、電動汽車驅(qū)動電機控制器概述電機控制器,控制動力電源與驅(qū)動電機之間能量傳輸?shù)难b置,由控制信號接口電路、驅(qū)動電機控制電路和驅(qū)動電路組成。
2838
年輕態(tài) ??? 4年前
一文解析自動駕駛汽車決策控制系統(tǒng)技術(shù) 
基于虛擬質(zhì)點模型方法的優(yōu)勢在于將算法模型統(tǒng)一,有效避免了傳統(tǒng)控制算法中因目標(biāo)或控制模式切換產(chǎn)生的車輛加減速度跳變的問題。 路徑規(guī)劃模塊 自動駕駛汽車路徑規(guī)劃模塊是指在一定的環(huán)境模型基礎(chǔ)上,給定自動駕駛汽車起始點和目標(biāo)點后,按照性能指標(biāo)規(guī)劃出一條無碰撞、能安全到達目標(biāo)點的有效路徑。
2535
木火柴 ??? 4年前
控制臂12工況自動加載tcl插件 
控制臂12工況自動加載tcl插件,有興趣的可以私聊
1677 4
lz1234 ??? 6年前
DTAS 3D多約束裝配助力懸架公差分析&尺寸鏈計算:麥弗遜/雙叉臂/多連桿/H臂一網(wǎng)打盡 
在轉(zhuǎn)彎、制動和加速時,懸架系統(tǒng)通過合理地分配車輪載荷,控制車身的姿態(tài)變化,確保汽車按照駕駛員的意圖行駛,提高行駛的安全性和操控性。 懸架公差仿真分析目標(biāo)是各公差對四輪定位參數(shù)的影響。前后輪的四輪參數(shù)包括車輪外傾、前束、前輪還包括主銷傾角等。
2554
DTAS棣拓尺寸公差分析及尺寸鏈計算 ??? 12月前
一文解析自動駕駛汽車決策控制系統(tǒng)技術(shù) 
基于虛擬質(zhì)點模型方法的優(yōu)勢在于將算法模型統(tǒng)一,有效避免了傳統(tǒng)控制算法中因目標(biāo)或控制模式切換產(chǎn)生的車輛加減速度跳變的問題。 路徑規(guī)劃模塊 自動駕駛汽車路徑規(guī)劃模塊是指在一定的環(huán)境模型基 礎(chǔ)上,給定自動駕駛汽車起始點和目標(biāo)點后,按照性能指標(biāo)規(guī)劃出一條無碰撞、能安全到達目標(biāo)點的有效路徑。
2287
木火柴 ??? 4年前
一文讀懂汽車芯片--控制芯片(車身+座艙)及車規(guī)AEC-Q100認(rèn)證 
車身域控制器功能表(1)工作要求汽車電子對MCU控制芯片的主要訴求為更好的穩(wěn)定性、可靠性、安全性、實時性等技術(shù)特性要求,以及更高的計算性能和存儲容量,更低的功耗指標(biāo)要求。
2789
falab ??? 2年前
基于Optistruct拓?fù)鋬?yōu)化控制臂優(yōu)化實用仿真(附帶詳細(xì)hm模型) 
本實例是基于optistruct優(yōu)化模塊優(yōu)化控制臂優(yōu)化實用仿真,本實例包含常規(guī)建模步驟涉及到分析步的設(shè)置,材料屬性的設(shè)置,邊界載荷施加等,優(yōu)化模塊涉及到體積分?jǐn)?shù)的設(shè)置,體積最小化約束 ,拔模方向約束等,提交計算,結(jié)果查看等,附帶詳細(xì)涉及的.hm模型,有需要的同學(xué)可自行下載查看。
42 2
王振東 ??? 6年前
基于Abaqus-ATOM優(yōu)化模塊拓?fù)鋬?yōu)化控制臂實用仿真(附帶詳細(xì)cae模型) 
本實例是基于Abaqus-ATOM優(yōu)化模塊拓?fù)鋬?yōu)化控制臂優(yōu)化實用仿真,本實例包含常規(guī)建模步驟涉及到分析步的設(shè)置,材料截面的設(shè)置,邊界載荷施加等,優(yōu)化模塊涉及到應(yīng)變能的設(shè)置,體積約束,邊界幾何約束,拔模方向約束等,提交計算,結(jié)果查看等,附帶詳細(xì)涉及的.cae(Abaqus6.14)模型,有需要的同學(xué)可自行下載查看。
81 7
王振東 ??? 6年前
20條/頁 
 152
152 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓(xùn)客服
- 平臺客服
TOP
