



激光測(cè)距傳感器在智能交通領(lǐng)域的應(yīng)用 
激光測(cè)距技術(shù)在物聯(lián)網(wǎng)智能交通中的一些可能應(yīng)用方向,主要包括:激光測(cè)速傳感器、汽車(chē)防撞系統(tǒng)、車(chē)流量監(jiān)控、車(chē)型描畫(huà)、車(chē)輛行人違法監(jiān)測(cè)以及其他一些精密監(jiān)控測(cè)量中的應(yīng)用等。
2374
威睛光學(xué) ??? 2月前
激光測(cè)距傳感器模塊在筒倉(cāng)料位監(jiān)測(cè)中的應(yīng)用方案 
,激光測(cè)距傳感器模塊L2-80采用光測(cè)量,所以一切工作思路請(qǐng)遵循光的特性來(lái)開(kāi)展,如光的反射性、穿透性等特性。
2338
摩天射頻 ??? 1年前
激光測(cè)距傳感器在室內(nèi)無(wú)人機(jī)定位追蹤中的應(yīng)用 
基于此無(wú)人機(jī)目標(biāo)識(shí)別與跟蹤技術(shù)的基本原理通過(guò)無(wú)人機(jī)搭載的攝像頭或其他傳感器設(shè)備,采集環(huán)境信息,然后通過(guò)算法分析這些信息,識(shí)別出目標(biāo)物體并將其位置、形狀等信息進(jìn)行精確跟蹤。這一過(guò)程涉及到圖像處理、模式識(shí)別、計(jì)算機(jī)視覺(jué)等多個(gè)領(lǐng)域的知識(shí)。 為了無(wú)人機(jī)可以準(zhǔn)確感知周?chē)h(huán)境的三維結(jié)構(gòu),實(shí)現(xiàn)自主避障和精準(zhǔn)定位,大大提升無(wú)人機(jī)的安全性和定位精度。可采用激光測(cè)距傳感器。
2286
摩天射頻 ??? 1年前
從厘米到月球:激光測(cè)距技術(shù) 
導(dǎo)航系統(tǒng)優(yōu)化:提升北斗導(dǎo)航的“精準(zhǔn)度”衛(wèi)星導(dǎo)航系統(tǒng)的定位精度依賴(lài)于衛(wèi)星軌道的精準(zhǔn)度。激光測(cè)距技術(shù)可對(duì)北斗衛(wèi)星等導(dǎo)航衛(wèi)星進(jìn)行高精度軌道校準(zhǔn),修正軌道誤差。據(jù)規(guī)劃,2025年我國(guó)將通過(guò)激光測(cè)距技術(shù)把亞太地區(qū)的北斗定位誤差從8米降至6.8米,大幅提升導(dǎo)航系統(tǒng)在交通、農(nóng)業(yè)、測(cè)繪等領(lǐng)域的應(yīng)用價(jià)值。
1829
威睛光學(xué) ??? 15天前
激光測(cè)距傳感器實(shí)時(shí)檢測(cè)橋梁隧道筑起堅(jiān)固防線(xiàn) 
激光測(cè)距傳感器的應(yīng)用顯著提高了監(jiān)測(cè)的效率和精度,?通過(guò)實(shí)時(shí)監(jiān)測(cè)各個(gè)測(cè)量點(diǎn)的位移變化,?了解各個(gè)點(diǎn)的壓力情況,?為安全生產(chǎn)提供幫助。
2480
摩天射頻 ??? 1年前
激光測(cè)距技術(shù)應(yīng)用—太空探索 
據(jù)規(guī)劃,2025年我國(guó)將通過(guò)激光測(cè)距技術(shù)把亞太地區(qū)的北斗定位誤差從8米降至6.8米,大幅提升導(dǎo)航系統(tǒng)在交通、農(nóng)業(yè)、測(cè)繪等領(lǐng)域的應(yīng)用價(jià)值。
2596
威睛光學(xué) ??? 3月前
激光雷達(dá)超遠(yuǎn)距離測(cè)距技術(shù) 
若要在更遠(yuǎn)的距離上實(shí)現(xiàn)交會(huì)對(duì)接功能,則必須借鑒雙向單程的星間測(cè)距原理,在目標(biāo)航天器上安裝合作目標(biāo)雷達(dá),完成雙向測(cè)距。由于兩對(duì)接航天器處于高速相對(duì)運(yùn)動(dòng)狀態(tài),這就給激光捕獲跟蹤和高精度測(cè)距帶來(lái)挑戰(zhàn)。重點(diǎn)研究將激光通信測(cè)距一體化技術(shù)應(yīng)用于激光交會(huì)對(duì)接雷達(dá)中,在不改變?cè)欣走_(dá)主機(jī)架構(gòu)和信號(hào)體制下,實(shí)現(xiàn)對(duì)遠(yuǎn)距離高動(dòng)態(tài)合作目標(biāo)的通信測(cè)距功能。將分析測(cè)距原理,給出速度、時(shí)鐘性能等因素對(duì)測(cè)距誤差的影響。
1077
威睛光學(xué) ??? 2月前
AMESim液壓仿真技術(shù)及其在液壓缸性能分析中的應(yīng)用 
采用位置反饋控制液壓缸推動(dòng)一個(gè)負(fù)載,位置傳感器將采集到的位置信號(hào)實(shí)時(shí)傳輸?shù)轿恢每刂?em>系統(tǒng)中。位置循環(huán)用位置循環(huán)子模型設(shè)定。指定的位置同傳感器反饋的位置比較產(chǎn)生誤差。該誤差乘以一個(gè)增益后的信號(hào)用于驅(qū)動(dòng)伺服閥。另一個(gè)工作循環(huán)通過(guò)位移傳感器對(duì)液壓缸施加一個(gè)外負(fù)載。
6422 7
液壓那些事 ??? 2年前
四種接近傳感器PK,誰(shuí)能勝出?答案內(nèi)詳 
大功率傳感器的工作原理與超聲波傳感器相同,但使用激光束代替了聲波。 由于光子的傳播速度超高,準(zhǔn)確計(jì)算ToF很困難。在這里,使用諸如干涉測(cè)量之類(lèi)技術(shù)可以幫助保持精度,同時(shí)降低成本(圖3)。激光測(cè)距儀傳感器的另一個(gè)好處是,由于利用了電磁波束,它們通常具有令人難以置信的超長(zhǎng)測(cè)量范圍(最高達(dá)數(shù)千英尺),而且響應(yīng)時(shí)間極短。 圖3:使用干涉測(cè)量法的激光測(cè)距儀傳感器實(shí)現(xiàn)。
2070
電子工程世界EEWorld ??? 4年前
液壓用壓力傳感器的原理及應(yīng)用 
04壓力傳感器的應(yīng)用液壓壓力傳感器對(duì)于每個(gè)液壓系統(tǒng)都至關(guān)重要。保持所需的壓力有助于液壓系統(tǒng)的順利運(yùn)行。典型的應(yīng)用包括: 車(chē)輛的液壓系統(tǒng) 、物料輸送系統(tǒng) 、液壓工具和液壓系統(tǒng) 、材料測(cè)試機(jī) 、自適應(yīng)懸掛系統(tǒng)。
3633 1
液壓說(shuō) ??? 3年前
激光測(cè)距傳感器對(duì)砂石廠物料高度檢測(cè)方法 
選擇合適的物料高度檢測(cè)技術(shù)需要根據(jù)具體的應(yīng)用要求、環(huán)境條件和成本考慮。在實(shí)際應(yīng)用中,可能會(huì)根據(jù)具體情況選擇適合的檢測(cè)技術(shù),或者結(jié)合使用多種方法來(lái)提高測(cè)量的穩(wěn)定性和準(zhǔn)確性。砂石廠使用激光測(cè)距傳感器對(duì)物料高度進(jìn)行檢測(cè)的主要原因是它具有高精度、非接觸式和快速響應(yīng)的特點(diǎn)。激光測(cè)距傳感器能夠通過(guò)測(cè)量反射光束的時(shí)間來(lái)準(zhǔn)確測(cè)量物體距離,因此可以實(shí)時(shí)監(jiān)測(cè)料位高度,無(wú)需與物料接觸,從而避免了對(duì)物料造成干擾或污染。
1762
摩天射頻 ??? 1年前
超聲波在無(wú)人機(jī)避障系統(tǒng)的應(yīng)用 
無(wú)人機(jī)的海拔高度信息一般通過(guò)氣壓計(jì)、GPS等測(cè)量得到,無(wú)人機(jī)相對(duì)于地面高度,可以使用聲納測(cè)距、激光測(cè)距、微波雷達(dá)測(cè)距、以及機(jī)器視覺(jué)測(cè)量方法等方式得到。對(duì)于地面高度測(cè)距基本采用超聲波傳感器。 無(wú)人機(jī)采用超聲波傳感器就是利用超聲波碰到其他物質(zhì)會(huì)反彈這一特性,進(jìn)行高度控制。前面就提到過(guò)近地面的時(shí)候,利用氣壓傳感器是無(wú)法應(yīng)對(duì)的。但是利用超聲波傳感器在近地面就能夠?qū)崿F(xiàn)高度控制。
2304
工采網(wǎng) ??? 3年前
[Optiwave] OptiSystem應(yīng)用:激光雷達(dá)系統(tǒng)設(shè)計(jì) ![[Optiwave] OptiSystem應(yīng)用:激光雷達(dá)系統(tǒng)設(shè)計(jì)](https://img.jishulink.com/msimage/202509/d1f6261cd27efd5a2ea6acf7c034df32.png?image_process=resize,fw_294,fh_172,)
簡(jiǎn)介:激光探測(cè)和測(cè)距系統(tǒng)(LIDAR) 以下四個(gè)示例設(shè)計(jì)演示了如何使用OptiSystem模擬光檢測(cè)和測(cè)距系統(tǒng)(LIDAR),具體如下: □ 激光脈沖飛行時(shí)間測(cè)量 □ 相移測(cè)距 □ 調(diào)頻連續(xù)波(FMCW)直接檢測(cè)測(cè)距和調(diào)頻連續(xù)波相干測(cè)距 圖1.使用直接檢測(cè)的FMCW LIDAR OptiSystem模型示例視圖 1.測(cè)距(飛行時(shí)間
2378
信光嗎 ??? 8月前
一文讀懂汽車(chē)芯片--激光雷達(dá)及車(chē)規(guī)AEC-Q102認(rèn)證 
激光雷達(dá)概覽(1)發(fā)展歷程激光雷達(dá)LiDAR(Light Detection And Ranging)是激光探測(cè)及測(cè)距系統(tǒng)的簡(jiǎn)稱(chēng),主要構(gòu)成要素包括發(fā)射系統(tǒng)、接收系統(tǒng)和信號(hào)處理系統(tǒng)。激光雷達(dá)系統(tǒng)的核心組件主要有激光發(fā)射器、掃描器及光學(xué)組件、光電探測(cè)器及接收IC,以及位置和導(dǎo)航器件等,可提供高分辨率的幾何圖像、距離圖像、速度圖像。
2319
falab ??? 2年前
OptiSystem 應(yīng)用:激光雷達(dá)系統(tǒng)設(shè)計(jì) 
簡(jiǎn)介:激光探測(cè)和測(cè)距系統(tǒng)(LIDAR)以下四個(gè)示例設(shè)計(jì)演示了如何使用OptiSystem模擬光檢測(cè)和測(cè)距系統(tǒng)(LIDAR),具體如下:?激光脈沖飛行時(shí)間測(cè)量?相移測(cè)距?調(diào)頻連續(xù)波(FMCW)直接檢測(cè)測(cè)距和調(diào)頻連續(xù)波相干測(cè)距圖1使用直接檢測(cè)的FMCW LIDAR OptiSystem模型示例視圖1.測(cè)距(飛行時(shí)間)1)原理簡(jiǎn)介?使用激光脈沖,飛行時(shí)間測(cè)距法測(cè)量發(fā)射脈沖從發(fā)射裝置行進(jìn)到目標(biāo)并返回接收器所花費(fèi)的時(shí)間
2266
追光ing ??? 8月前
應(yīng)用在汽車(chē)前照燈系統(tǒng)中的環(huán)境光傳感芯片 
環(huán)境光傳感芯片 - ALS-AK510的應(yīng)用:黎明或黃昏傳感監(jiān)控?cái)z像頭記本電腦,手機(jī),液晶電視的背光顯示夜燈汽車(chē)前照燈系統(tǒng)在環(huán)境光測(cè)距領(lǐng)域,臺(tái)灣旺泓便是其中的佼佼者之一。了解更多關(guān)于臺(tái)灣旺泓環(huán)境光傳感芯片的技術(shù)應(yīng)用,請(qǐng)聯(lián)系:133 9280 5792(微信同號(hào))
2114
如果我年少有為 ??? 2年前
OptiSystem應(yīng)用:激光雷達(dá)系統(tǒng)設(shè)計(jì) 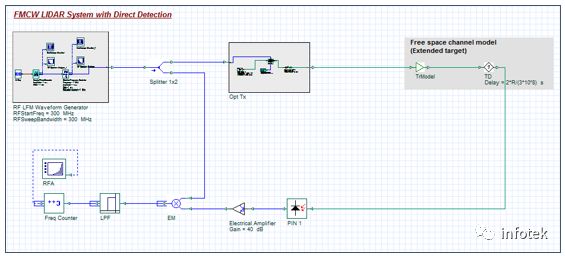
簡(jiǎn)介:激光探測(cè)和測(cè)距系統(tǒng)(LIDAR) 以下四個(gè)示例設(shè)計(jì)演示了如何使用OptiSystem模擬光檢測(cè)和測(cè)距系統(tǒng)(LIDAR),具體如下: 激光脈沖飛行時(shí)間測(cè)量相移測(cè)距調(diào)頻連續(xù)波(FMCW)直接檢測(cè)測(cè)距和調(diào)頻連續(xù)波相干測(cè)距圖1.使用直接檢測(cè)的FMCW LIDAR OptiSystem模型示例視圖 1.測(cè)距(飛行時(shí)間) 原理簡(jiǎn)介 使用激光脈沖,飛行時(shí)間測(cè)距法測(cè)量發(fā)射脈沖從發(fā)射裝置行進(jìn)到目標(biāo)并返回接收器所花費(fèi)的時(shí)間
2264
追光ing ??? 1年前
OptiSystem應(yīng)用:激光雷達(dá)系統(tǒng)設(shè)計(jì) 
簡(jiǎn)介:激光探測(cè)和測(cè)距系統(tǒng)(LIDAR) 以下四個(gè)示例設(shè)計(jì)演示了如何使用OptiSystem模擬光檢測(cè)和測(cè)距系統(tǒng)(LIDAR),具體如下: 激光脈沖飛行時(shí)間測(cè)量相移測(cè)距調(diào)頻連續(xù)波(FMCW)直接檢測(cè)測(cè)距和調(diào)頻連續(xù)波相干測(cè)距 圖1.使用直接檢測(cè)的FMCW LIDAR OptiSystem模型示例視圖 1.測(cè)距(飛行時(shí)間) 原理簡(jiǎn)介 使用激光脈沖,飛行時(shí)間測(cè)距法測(cè)量發(fā)射脈沖從發(fā)射裝置行進(jìn)到目標(biāo)并返回接收器所花費(fèi)的時(shí)間
2337
追光ing ??? 2年前
光電傳感器工作原理:光電效應(yīng)在檢測(cè)中的應(yīng)用
發(fā)送器通常包括一個(gè)光源,如發(fā)光二極管(LED)、激光二極管或紅外發(fā)射二極管,用于發(fā)射光束。接收器則包含光電元件,如光電二極管、光電三極管或光電池,用于接收并轉(zhuǎn)換光信號(hào)為電信號(hào)。檢測(cè)電路則負(fù)責(zé)濾出有效信號(hào),并將其應(yīng)用于控制系統(tǒng)。 光電傳感器的工作原理基于光電效應(yīng)。
2923
MISUMI米 ??? 2年前
應(yīng)用在夜燈領(lǐng)域的環(huán)境光測(cè)距感器芯片 
在光距感測(cè)距領(lǐng)域,臺(tái)灣旺泓便是其中的佼佼者之一。了解更多關(guān)于臺(tái)灣旺泓環(huán)境光傳感芯片的技術(shù)應(yīng)用,請(qǐng)聯(lián)系:133 9280 5792(微信同號(hào))
1965
如果我年少有為 ??? 4年前
20條/頁(yè) 
 31
31 跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
