



全自動影像儀圖像自動匹配對焦,測量一致性好 
Novator系列全自動影像儀新增圖像匹配功能,通過產品整體圖像實現匹配測量,解決了產品變形較大的難題! 此外Novator系列全自動影像儀使用硬觸發式對焦模式,自動對焦,測量一致性好:單向運動,一次對焦,消除人為誤差,保證多次測量一致性。
2104
深圳市中圖儀器股份有限公司 ??? 2年前
一文了解CMOS圖像傳感器攝像頭的進階設計方法 
CMOS圖像傳感器廣泛應用于當今的數碼相機和手機,它利用了現有的CMOS制造工藝,已成為低成本圖像傳感設計方法。現在,有一種設計CMOS圖像傳感器攝像頭的進階方法——通過Ansys Lumerical與Ansys SPEOS之間的互操作,工程師能夠設計包含宏觀透鏡和微觀傳感器的攝像頭系統,且優化CMOS傳感器的效率。該工作流程能幫助工程師考慮真實照明條件,同時優化CMOS圖像傳感器。
2649 3 3
Ansys中國 ??? 4年前
1-16 基于MATLAB平臺的otsuf方法的圖像分割 

基于MATLAB平臺的otsuf方法的圖像分割,程序已調通,可更換自己的圖片進行分割,程序具有詳細的代碼注釋,可輕松掌握。程序保證可直接運行。 購買后可下載視頻中的源程序文件。
211
matlab應用與學習 ??? 1年前
自動駕駛系統的傳感器標定方法 
這個方法無法在室外自然環境中使用,因為點云投影的圖像點很難確定。有三篇關于如何優化激光雷達-攝像頭標定的論文,不是通過3-D點云和圖像點的匹配誤差來估計標定參數,而是直接計算點云在圖像平面形成的深度圖,其和攝像頭獲取的圖像存在全局匹配的測度。不過這些方法,需要大量迭代,最好的做法是根據手眼標定產生初始值為好。
2298
駕駛哥 ??? 3年前
機器視覺定位之零部件尺寸檢測技術 
4.圖像匹配 在工業生產加工中,我們所檢測的零部件往往不是單一的,有時候會涉及各種各樣的零部件,通過模板匹配技術就可以實現。模板匹配可以用來做完整性檢測、區分不同類型的物體和得到目標物體在圖像中的位姿。模板的匹配有幾種不同的匹配方式:基于灰度值的匹配、使用圖形金字塔進行的匹配、基于灰度值的亞像素精度的匹配、帶旋轉和縮放的模板匹配。
2420
非標機械論壇 ??? 4年前
16基于otsuf方法的圖像分割,程序已調通,可更換自己的圖片進行分割,程序具有詳細的代碼注釋, 
基于otsuf方法的圖像分割,程序已調通,可更換自己的圖片進行分割,程序具有詳細的代碼注釋,可輕松掌握。基于MATLAB平臺,需要直接拍下。
2020
matlab應用與學習 ??? 2年前
基于Matlab的纖維圖像特征提取與自動分類程序實現 
圖2 圖像分類方法流程圖實驗結果筆者基于上述的方法編寫了MATLB代碼,搭建了App Designer GUI軟件界面,能夠快速地實現纖維圖像提取與自動分類。讀取纖維圖片,自動輸入纖維種類,顯示纖維圖像,經過灰度處理,再通過二值化+細化,利用Harris角點檢測算法進行特征點提取,進行匹配相似性計算,從而最終輸入分類結果,顯示纖維種類。
2686 2 1
320科技工作室 ??? 1年前
盤一盤近幾年SOTA方法! 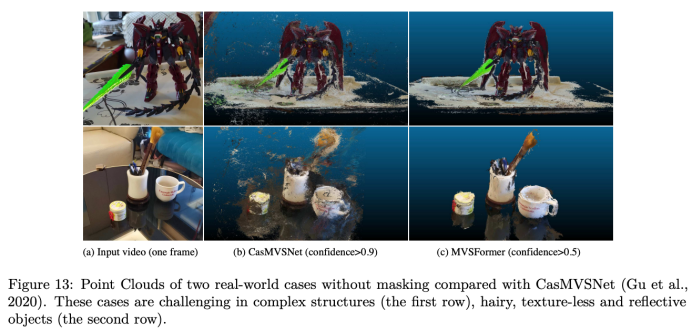
提出一種端到端的多視圖重建深度學習架構,參考基于2張圖片的代價體的雙目立體匹配深度估計方法,擴展到多張圖片中進行深度估計。MVSNet的核心不是直接把3D模型建出來,而是端到端的學習深度圖,它的目標是預測圖片上每個像素的深度信息。在該架構中,首先提取深層的視覺圖像特征,然后通過可微分的單應變換,基于參考視圖的相機視錐體構建3D代價體。
4287
駕駛哥 ??? 3年前
基于深度學習的超分辨率圖像技術一覽 
對于HR到LR 的GAN模型,HR圖像被饋送到生成器產生LR輸出,不僅需要匹配HR圖像縮小(平均池化)獲得的LR圖像,而且還要匹配真實LR圖像的分布。訓練之后,生成器作為退化模型生成LR-HR圖像對。 對于LR到HR 的GAN模型,生成器(即SR模型)將生成的LR圖像作為輸入并預測HR輸出,不僅需要匹配相應的HR圖像而且還匹配HR圖像的分布 。
2442
駕駛哥 ??? 4年前
無人機導航定位系統關鍵技術研究 
因此,圖像匹配篩選算法需要一種方法來判斷匹配的好壞,更好地消除不匹配的點和噪聲。 定位精度和實時性 四旋翼無人機的最快飛行速度可以達到每秒8米。如果視覺定位算法不能實現實時定位,無人機可以獲得延遲的位置信息,那么視覺定位的功能就沒有多大用處了。
2324
無人機圈 ??? 4年前
康謀分享 | aiSim5 物理相機傳感器模型驗證方法(一) 
圖4:真實世界中進行傳感器標定的場景 圖5:aiSim中搭建的用于相機標定車庫場景二、色彩校準測試1、簡介在進行相機圖像匹配時,使用Color Correction Matrix (CCM) 是一種有效的方法,可以通過對已知相機拍攝的參考照片和aiSim渲染的Macbeth色板圖表進行比較來計算CCM。
2218
康謀keymotek ??? 2年前
基于深度學習的多目標跟蹤算法原理 
也可以通過設計二分類代價,使相同目標的檢測特征匹配類型為 1,然不同目標的檢測特征匹配類型為 0,從而學習并輸出(0,1]之間的檢測匹配度。如果考慮已有軌跡與檢測之間的匹配,采用深度學習方法可以用于設計并計算軌跡之間的匹配相似度,這種方法可以認為是基于深度學習的高階特征匹配方法。使用深度學習計算高階特征匹配算法,可以學習多幀表現特征的高階匹配相似度,也可以學習運動特征的匹配相關度。
3206
駕駛哥 ??? 4年前
基于模型的自動駕駛汽車端到端深度強化學習策略 
該轉移估計將與 at?1 (可以訪問地面真實動作)和 ot (圖像觀察)的后驗分布進行比較。先驗分布試圖匹配后驗分布的分歧匹配框架可以確保模型預測解釋觀察到的數據行為和未來狀態。后驗與先驗的差異衡量了在觀察后驗時從先驗中丟失了多少信息,這種信息丟失也就是我們這里所說的散度損失。
3904 2 1
駕駛哥 ??? 2年前
沖壓質量模板匹配視覺檢測技術應用 
圖4 模板匹配檢測原理示意圖圖5 模板匹配檢測流程 檢測過程是一個采集攝像頭圖像并進行圖像處理(基于開源計算機視覺和機器學習軟件庫OpenCV 的圖像處理)的過程,計算機所處理的圖像,其實是一個由一系列范圍在[0,255]區間的灰度值組成的二維矩陣。
2224
FMMM ??? 4年前
康謀分享 | 突破傳統匿名化:先進技術解鎖數據價值新維度 
每個替換都盡可能匹配源對象的屬性,但這種匹配是有選擇性的,我們可以靈活控制保留哪些屬性。例如,對于人臉,保留性別和年齡等屬性可能對后續分析至關重要。對于可識別信息以外的內容,不包含敏感個人數據的信息則保留不做修改。通過這種方式,DNAT成功打破了數據消除與匿名化之間的傳統矛盾。
2275
康謀keymotek ??? 1年前
飛機裝配中的數字孿生+AR技術 
實際監測時,通過將拍攝的支架圖片進行圖像處理,提取圖像輪廓,計算輪廓矩,作為當前支架姿態的特征,輸入到姿態數據庫(圖庫)中進行kNN最鄰近搜索,查找到與其最匹配的姿態作為輸出。圖5 基于AR的支架安裝狀態監測系統架構以單獨支架狀態監測為基礎,面對整塊裝配區域的多個安裝位置的支架,可以通過模板匹配的方法,識別整個區域的所有支架狀態。
2659 1
機械工業出版社E視界 ??? 3年前
對象檢測 vs 對象識別 vs 圖像分割 
如果我們想定位邊界框中對象的存在,我們需要嘗試一種不同的方法,該方法不僅輸出類標簽,還輸出邊界框位置。 ? 編輯 與對象識別相關的任務概述 圖像分類 : 在圖像分類中,它以圖像作為輸入,并輸出該圖像的分類標簽以及一些指標(概率、損失、準確性等)。
4299 36 14
仿真資料吧 ??? 1年前
請問誰有完美匹配層PML在ABAQUS中實現的方法呀?
小弟在做地鐵車站數值模擬,想在土體外加完美匹配層PML,請問哪位大哥有辦法啊,聯系我好嘛?vx:gf894678814
2573 2 1
小程序用戶_o3qZstAt ??? 3年前
基于Python的復雜環境中車道線自動檢測系統 
HSL圖像 RGB圖像 組合過濾方法 現在,我們可以混合并匹配不同的過濾器方法,每種方法都具有唯一的閾值,以獲取精確的二進制圖像。 我測試了許多不同過濾器的許多按位組合。他們對于圖像整體都產生了不同的結果,但是這種組合在保留黃色車道線的信息方面做得最好,尤其是當距離越來越遠且在陰影下時。
2898 2 2
320科技工作室 ??? 4年前
知語云:低慢小無人機管制反制監測 探測偵測方式方法? 
探測器中除了依靠圖像之外,也可以擴展應用雷達、無線電臺和衛星導航系統。地面站軟件需要解決目標和探測平臺同時運動的條件下的數據處理問題等。2017年,ArtemRozantsev等人采用深度學習的方法,實現了用于無人機對小視場內無人機的探測等。2018年,Opromolla等等人采用模板匹配、形態學濾波器等算法實現了用無人機跟蹤合作無人機,并在這一過程中融入導航信息。
4636 8 2
用戶_34138 ??? 2年前
20條/頁 
 103
103 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
