



康謀方案 | 高精LiDAR+神經渲染3DGS的完美融合實踐 
(3)自動標注: 利用aiData工具鏈去除動態目標、生成GT數據,實現非因果式追蹤。 環視系統自動標注(4)神經網絡訓練: 使用NeRF/3DGS算法生成高精度三維場景。
2439
康謀keymotek ??? 11月前
3DGS 與 OpenMATERIAL:場景表示與材質標準的分層協同 
OpenMATERIAL 標準的完整標準化實現; 康謀 UE+GS 插件:負責層2→層5,可在 3DGS 場景中插入 OpenMATERIAL 定義的合成資產,實現統一渲染,直接跨越層3。
2347
康謀keymotek ??? 1月前
3DGS技術詳解(一):3DGS如何融合動態天氣與光照等環境因素? 
二、靜態重建到動態環境的技術演進1、3DGS的核心機制與局限3DGS用數百萬個3D高斯橢球體來表示場景,每個高斯體攜帶位置、協方差、不透明度和顏色信息。渲染時按深度排序投影到2D平面,通過alpha混合生成最終圖像。相比NeRF需要對每個像素進行耗時的體積渲染,3DGS的光柵化過程能充分利用GPU并行計算,實現實時渲染。但原始3DGS有個致命缺陷:它假設場景靜態、光照恒定。
2176
康謀keymotek ??? 3月前
視覺重建到物理仿真,3DGS如何走向工程應用? 
SIGGRAPH 2024 的“3D Gaussian Splatting with Deferred Reflection”給出了一條兼顧質量與效率的實現路徑[3]。該方法在高斯渲染階段生成反射強度、法線和基色等屏幕空間信息,再在延遲著色階段計算反射方向與環境光響應,從而實現更合理的反射效果。
2300
康謀keymotek ??? 2月前
如何閉環自動駕駛仿真場景,實現從“重建”到“可用”? 
同時,該渲染器能夠有效減少偽影的產生,無論是在復雜的城市街景還是開闊的高速公路場景中,都能實現高保真度的 3DGS 重建場景渲染。此外,aiSim在渲染流程中支持任意相機畸變模型接入,能夠根據不同相機的特性對渲染過程進行精準適配,使得仿真數據在色彩、亮度、對比度以及畸變校正等方面,都能高度貼近真實傳感器的輸出。
2240
康謀keymotek ??? 6月前
3D Gaussian Splatting從入門到精通——純PyTorch實現(全套案例) 
:中級(Intermediate) - 內容類別:電子學習(eLearning) - 語言:英語(無字幕) - 課程時長:77講,總計15小時54分鐘 - 文件大小:10.6 GB 二、你將學到什么 - 使用Python和PyTorch從零實現完整的3D高斯潑濺(3DGS)流水線 - 理解并構建3DGS
2577 1
仿真資料吧 ??? 6月前
2026年,3DGS和世界模型,在自動駕駛仿真中的組合 
一句話總結3DGS:這是一種基于點云優化的3D高斯分布表征技術,可實現高保真動態三維場景的快速渲染。簡單來說,它是一種革新性的三維建模技術——使用者只需手持掃描設備對目標物體或場景掃描一圈,就能直接生成對應的三維模型(過程如下圖所示)。這種模型的細節紋理與真實世界高度貼合,使得整個仿真過程兼具高效性與逼真度,對傳統三維建模技術形成了降維打擊。
2696
康謀keymotek ??? 3月前
生成式 AI 重塑自動駕駛仿真:4D 場景生成技術的突破與實踐 
不同于 NeRF 使用體積積分的方式,3DGS 將空間中的顏色和密度建模為可渲染的高斯球體,渲染效率顯著提升。
2967
康謀keymotek ??? 9月前
解鎖端到端仿真新可能 :全新aiSim 6 即將發布 
1、基于物理的動態神經渲染3D Gaussian Splatting(3DGS)是當前神經場景重建的主流技術路線,能夠將真實道路環境重建為高保真數字孿生場景,仿真效果極具說服力。但 3DGS 有一個結構性局限:顏色與光照信息是"烘焙"進 splat 點云之中的,場景一旦采集,光照條件就被固定——原本在正午拍攝的路段,無法還原為傍晚或夜間環境。
1335
康謀keymotek ??? 2月前
康謀分享 | aiSim5基于生成式AI擴大仿真測試范圍(終) 
當然為了解決這些問題研究人員通過引入深度正則化來提升NeRF深度估計的準確性和穩定性,通過優化NeRF的結構和算法提升渲染速度。二、3DGS1、3D高斯潑濺(3D Gaussian Splatting)3DGS采用三維高斯分布來表示場景中的點云數據,每個點用一個具有均值和協方差的高斯函數來描述。通過光柵化渲染高斯函數,從而生成逼真的3D場景圖像。
2573
康謀keymotek ??? 2年前
告別數月等待:數字孿生場景生成從此進入“日級”時代 
具體實施步驟為:客戶自有數采車隊采集場景數據,用于3DGS場景重建;基于采集數據構建3D模型,支持高保真交通、場景和傳感器仿真;訓練3DGS數據孿生場景,并無縫導入aiSim中使用;提供客戶自有UE引擎DiL模擬工具,實現駕駛員參與的閉環仿真測試。四、總結在自動駕駛的競爭賽道上,高保真、可擴展的仿真場景構建已成為端到端系統級驗證的關鍵。
1393
康謀keymotek ??? 8月前
邁向智駕高階驗證:康謀高保真HIL仿真解決方案,重塑測試價值 
2、aiSim 定義核心技術該方案的核心軟件aiSim,作為全球首個通過ISO 26262 ASIL-D認證的仿真工具,其技術領先性全方位賦能測試提升: 解決3DGS重建下大FOV相機導致的非一致性問題(1)高保真感知仿真:融合光柵化、光線追蹤、NeRF/3DGS 多渲染技術,自研 GGSR 通用高斯潑濺渲染器優化 RayTracing 傳感渲染,解決廣角鏡頭一致性問題
1847
康謀keymotek ??? 3月前
Nerf和3DGS神經重建技術在自動駕駛模擬中的應用 
在成熟的基于物理的渲染方案中集成最前沿的神經重建技術,使我們能夠在任意位置虛擬地插入動態對象,調整環境條件,并渲染以前未見過的相機視角。</p><p>通過這種方式,我們能實現以下的功能:</p><h3>1、虛擬動態內容插入:</h3><p>(1)添加具有逼真光照和環境光遮蔽的動態對象。</p><p>(2)模擬如雨、雪、霧等環境效果,以創建更多樣化的模擬場景。
2338
康謀keymotek ??? 1年前
云端解鎖ParaView并行渲染,千萬級網格模型可視化 
在渲染上,ParaView實際是 調用了IceT庫實現其并行渲染算法。IceT是一個開源的并行圖像合成庫,主要用于 在大規模并行計算環境中可視化和渲染應用程序。IceT庫提供了高效的并行渲染方法,適用于需要處理大規模數據集的可視化應用程序。ParaView通過庫中sort-last算法進行并行渲染,算法將圖像分割成多個小塊,每個處理器都獨立地渲染它所負責的塊,并生成局部圖像。
2544
神工坊(高性能仿真) ??? 11月前
在神工坊ParaView上體驗并行渲染可視化 
在渲染上,ParaView實際是 調用了IceT庫實現其并行渲染算法。IceT是一個開源的并行圖像合成庫,主要用于 在大規模并行計算環境中可視化和渲染應用程序。IceT庫提供了高效的并行渲染方法,適用于需要處理大規模數據集的可視化應用程序。ParaView通過庫中sort-last算法進行并行渲染,算法將圖像分割成多個小塊,每個處理器都獨立地渲染它所負責的塊,并生成局部圖像。
2658
神工坊(高性能仿真) ??? 2年前
World Extractor × 3DGS:一日生成高保真仿真環境 

本視頻展示 World Extractor 依托自動標注與 3DGS 技術一日即可構建的舊金山城市場景及辦公樓停車場景,同時可直接實現匿名化處理!
康謀keymotek ??? 3月前
康謀分享 | 汽車仿真與AI的結合應用 
在自動駕駛領域,實現高質量的虛擬傳感器輸出是一項關鍵的挑戰。所有的架構和實現都會涉及來自質量、性能和功能集成等方面的需求。aiSim也不例外,因此我們會更加關注于多個因素的協調,其中,aiSim傳感器實現的神經網絡渲染仿真方案,在aiSim能夠在現有功能上實現多用途擴展的同時,也可以最大程度上保留原始特性。
2227
康謀keymotek ??? 1年前
CAD軟件中TrueType字體的顯示原理是什么?
3. 指令執行與網格適配 指令解釋器:運行字形關聯的 TrueType 指令,調整輪廓點位置以適配像素網格。例如,將字符 "i" 的點垂直對齊到像素中心,確保不同字號下的視覺一致性。 渲染模式選擇: 填充模式:根據輪廓點編號順序(升序或降序)確定填充區域,通常升序時填充右側空間。 線框模式:僅顯示輪廓線,用于快速預覽或特定工程需求。4.
2475
自學土木網 ??? 8月前
探討如何構建端到端高置信度驗證體系? 
光照一致性:在場景中放置虛擬的、已標定的相機模型,渲染圖像并與真實照片對比(PSNR/SSIM)。多模態一致性:基于下游感知任務驗證從重建場景中生成的相機圖像和LiDAR點云是否在空間和語義上保持一致。3、動態場景高置信度還原目標是實現交通流和關鍵交互行為在時空維度上的精確復現。
2857
康謀keymotek ??? 5月前
Light | 呼之欲出: 裸眼3D時代終要到來 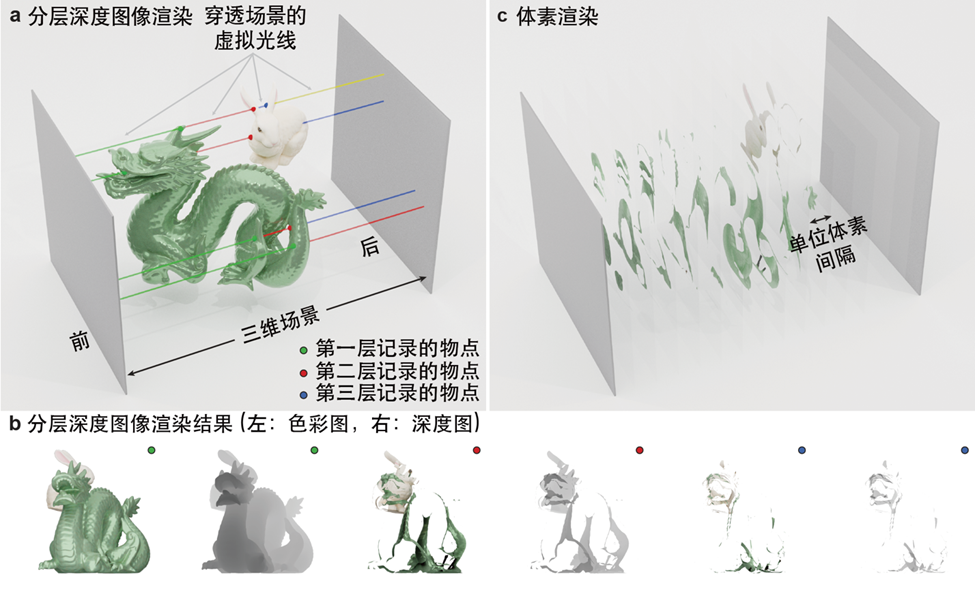
圖3:(a)三維投影拍攝結果展示,相較前期工作,本文改善了前景背景邊界的失真,實現了更逼真的景深效果,(b)神經網絡同時實現全息投影像差矯正研究結果顯示,該方法能夠穩健地處理非完美深度圖的真實采集輸入,且通過用戶閉環(user-in-the-loop)校準數據集,可以實現端到端生成光學像差矯正后的三維投影,已達到去除用戶佩戴矯正眼鏡的需求。
2668
光與影 ??? 3年前
20條/頁 
 11
11 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
