



Intrepid—總線采集測(cè)試仿真工具 
Vehicle Spy是英特佩斯推出的簡(jiǎn)單易用高性價(jià)比的總線工具,包含分析軟件和采集調(diào)試硬件,具備對(duì)各類總線數(shù)據(jù)的網(wǎng)絡(luò)監(jiān)控、診斷、總線分析、數(shù)據(jù)采集、節(jié)點(diǎn)仿真、自動(dòng)化測(cè)試等功能,目前支持的總線類型包含CAN、CANFD、LIN、FlexRay、車載以太網(wǎng)等各類總線格式。
2158
經(jīng)緯恒潤(rùn) ??? 4年前
挖掘機(jī)多體動(dòng)力學(xué)仿真 
后續(xù),我們將在挖掘機(jī)全剛體模型的基礎(chǔ)上,對(duì)挖掘機(jī)動(dòng)臂進(jìn)行柔性化,進(jìn)行基于INTESIM-FMBD軟件的剛?cè)狁詈隙囿w動(dòng)力學(xué)仿真,分析挖掘機(jī)動(dòng)臂動(dòng)態(tài)應(yīng)力變化。另外,通過(guò)我方軟件提供的控制模型接口,可以進(jìn)一步實(shí)現(xiàn)虛擬樣機(jī)下的動(dòng)力學(xué)與控制聯(lián)合仿真。 文章來(lái)源:英特仿真INTESIM
3709 3
CAE仿真學(xué)習(xí)菌 ??? 2年前
您真的了解熱設(shè)計(jì)與仿真嗎? 
此外,英特仿真還擁有云平臺(tái)、數(shù)字孿生軟件、數(shù)字人軟件等戰(zhàn)略新產(chǎn)品。12)世冠科技:專業(yè)從事工業(yè)軟件系統(tǒng)仿真技術(shù)開(kāi)發(fā)與應(yīng)用,為復(fù)雜裝備研制單位和工業(yè)制造企業(yè),提供可支撐產(chǎn)品設(shè)計(jì)研發(fā)及使用運(yùn)維、覆蓋產(chǎn)品全生命周期的完全自主研發(fā)的系統(tǒng)仿真工業(yè)軟件和數(shù)字孿生解決方案。
3717 8 5
熱管理博覽會(huì) ??? 2年前
國(guó)產(chǎn)仿真軟件的星星之火何以燎原? 
此外,英特仿真還擁有云平臺(tái)、數(shù)字孿生軟件、數(shù)字人軟件等戰(zhàn)略新產(chǎn)品。
軸向磁通永磁同步電機(jī)仿真分析 
仿真計(jì)算轉(zhuǎn)矩曲線結(jié)果和對(duì)標(biāo)軟件基本吻合,并能夠輸出磁密云圖、磁密矢量圖、動(dòng)畫(huà)等電磁場(chǎng)景常用結(jié)果。本次案例驗(yàn)證了INTESIM低頻電磁模塊軸向磁通永磁同步電機(jī)仿真場(chǎng)景的仿真能力,能夠?yàn)閺V大用戶提供準(zhǔn)確可靠的電磁仿真結(jié)果。 END 文章來(lái)源: 英特仿真INTESIM
5436 2 1
萬(wàn)有引力LYQ ??? 2年前
電磁爐加熱過(guò)程電磁-熱耦合仿真 
仿真計(jì)算得到的熱損耗和溫度結(jié)果與對(duì)標(biāo)軟件結(jié)果基本吻合。本案例驗(yàn)證了INTESIM多物理場(chǎng)仿真模塊中的電磁-熱耦合仿真功能,對(duì)渦流場(chǎng)分析和熱場(chǎng)分析及耦合仿真進(jìn)行應(yīng)用驗(yàn)證,能夠?yàn)閺V大用戶在電器領(lǐng)域中的電磁場(chǎng)、熱場(chǎng)耦合仿真應(yīng)用提供可行方案。 文章來(lái)源: 英特仿真INTESIM
3037 6 1
萬(wàn)有引力LYQ ??? 2年前
壓氣機(jī)動(dòng)葉流場(chǎng)仿真分析 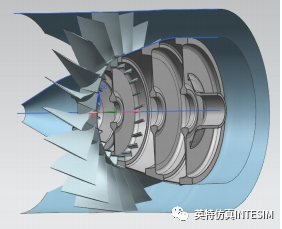
查看葉片壓力云圖壓力面吸力面速度矢量圖 文章來(lái)源:英特仿真INTESIM
2734 3 2
雙螺桿泵 ??? 2年前
誠(chéng)智鵬牽頭17家國(guó)產(chǎn)軟件聯(lián)盟:合力破解國(guó)際競(jìng)爭(zhēng)格局 
安世亞太科技股份有限公司廣州中望龍騰軟件股份有限公司湖南邁曦軟件有限責(zé)任公司南京天洑軟件有限公司山東山大華天軟件股份有限公司上海新迪數(shù)字技術(shù)有限公司上海易立德信息技術(shù)股份有限公司深圳蜂巢工軟科技有限公司深圳湃睿信息科技有限公司深圳市訊方技術(shù)股份有限公司深圳云泊軟件技術(shù)公司蘇州浩辰軟件股份有限公司武漢開(kāi)目信息技術(shù)股份有限公司英特工程仿真技術(shù)
2461
笑酒仙 ??? 1年前

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
