



萬字長文解析特斯拉自動駕駛體系 
仿真由于路測條件的限制,導致積累數據和訓練算法的效率偏低且成本高昂,為了更高效的實現數據訓練,特斯拉構建了一個真實世界的虛擬仿真空間,來加速FSD能力的訓練,仿真對于實現完全自動駕駛的價值如今在行業內已經普遍被認可。自動駕駛的仿真是在模擬環境中,通過調整各類交通參與物及環境的模型參數以構建各種虛擬場景,以訓練算法應對不同場景的性能。
2529
駕駛哥 ??? 4年前
特斯拉與毫末智行自動駕駛方案對比分析 
場景數字化,就是將行駛道路上的不同場景進行參數化的表示。參數化的好處在于可以對場景進行有效地分類,從而進行差異化的處理。按照不同的粒度,場景參數分為宏觀和微觀兩種。宏觀的場景參數包括天氣,光照,路況等,而微觀的場景參數則刻畫了自車的行駛速度,與周圍障礙物的關系等等。
2383
駕駛哥 ??? 4年前
設計仿真 | 馬恒達使用Adams與ODYSSEE機器學習構建頻率相關阻尼器準確預測行駛和操縱性能 
頻率選擇減振器(FSD)用于獲得最佳的乘坐和操縱性能。本研究使用定量方法來確定懸架參數的范圍,以提高乘坐舒適性和操縱性能。被動阻尼器使用簡單的非線性曲線(力與速度)建模,該曲線與FSD阻尼器模型的相關性不好。在現代乘用車的發展過程中,減振器的選擇在很大程度上涉及主觀測試。本文所提出的方法在模擬開發過程中更準確地預測了行駛和操縱性能。需要一個系統來實時監測和預測懸架支柱的性能。
2455
海克斯康設計與仿真 ??? 1年前
特斯拉AI Day最硬核的解讀來了!清華博導分析6大關鍵點 
接下來我們分幾個方面來解讀特斯拉FSD的算法和模型進展。
2277 1
駕駛哥 ??? 3年前
我們研究了特斯拉、毫末智行「自動駕駛算法」的秘密 
場景數字化,就是將行駛道路上的不同場景進行參數化的表示。參數化的好處在于可以對場景進行有效地分類,從而進行差異化的處理。按照不同的粒度,場景參數分為宏觀和微觀兩種:宏觀的場景參數包括天氣,光照,路況等;微觀的場景參數則刻畫了自車的行駛速度,與周圍障礙物的關系等。
2457
駕駛哥 ??? 4年前
簡述船舶設計基本流程 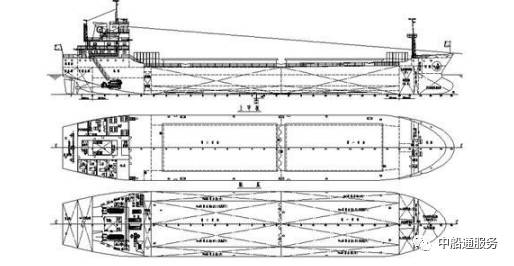
生產設計的輸入: 1.工藝文件,如精度作業指導書,主板坡口,分段劃分,FSD典型分段裝配要領,胎架數據一覽表,吊裝合攏順序等。 2.相關專業的前移項目,如提前隨組立進行舾裝等。 生產設計的輸出: 1. 組立圖,如零件明晰表,算材明細,舾裝件明細。 2. 加工圖,用于鋼料加工的指導,按工位出圖或數控數據。
5080 2 1
學有所長 ??? 2年前
一文解讀 | 車規芯片驗證的流程與展望 
每個過程都要借助數學統計研究分析工具來尋找最優參數來滿足芯片良率與質量的改善。fab廠通過檢測每道工序具體測試參數,芯片數量,頻率等信息,可以保證制程的穩定性。芯片測試盡量使測試覆蓋率達到最短時間內預先甄別不良品以免流向客戶端。芯片測試更快速高效的重要途徑之一就是通過對芯片進行自測設計,同時還能降低對外部ATE的資源依賴性。
4758
falab ??? 2年前
在迪斯下臺的背景下,再看軟件定義汽車 
以特斯拉為例,其在標配的基礎版AutoPilot之外,推出了售價6000美元的增強型自動駕駛輔助系統的選裝以及售價12000美元的完全自動駕駛FSD Beta。而在國內的新勢力車企中,蔚來和小鵬也會向客戶提供訂閱駕駛輔助功能的服務。銷售軟件,不僅是整車企業的一個新的機會,同時也會是很多諸如芯片企業的一個新機會。
2121 1
駕駛哥 ??? 3年前
科普 | 一文解讀汽車芯片知識 
幾個參數芯片制造過程可簡述為:先把硅石提純,熔化提拉為單晶硅圓柱并切片為晶圓;再根據芯片設計電路,通過光刻、刻蝕、摻雜等在晶圓上集成電路;最后,芯片從晶圓上切下來,貼片、封裝并測試。——芯片制程:芯片晶體管柵極寬度的大小。數字越小,晶體管密度越大,芯片性能就越高。逐漸縮小的芯片制程數字,代表著芯片技術進步的方向。——晶圓尺寸:目前主要有6英寸、8英寸和12英寸。
2182
駕駛哥 ??? 3年前
關于自動駕駛路線之爭的一些思考 
其中視覺方案對距離的識別問題特斯拉目前已經找到解決方案,通過建立BEV鳥瞰坐標系,利用Transformer神經網絡能力可以將地面坡度、曲率等參數內化進訓練網絡,解決了視覺方案僅能基于地面平面假設進行距離計算導致的準確度不夠的問題,隨著算法的持續訓練迭代,純視覺方案識別距離的能力會逐步逼近甚至超越雷達系統。
1712 1 1
木火柴 ??? 4年前
關于自動駕駛路線之爭的一些思考 
其中視覺方案對距離的識別問題特斯拉目前已經找到解決方案,通過建立BEV鳥瞰坐標系,利用Transformer神經網絡能力可以將地面坡度、曲率等參數內化進訓練網絡,解決了視覺方案僅能基于地面平面假設進行距離計算導致的準確度不夠的問題,隨著算法的持續訓練迭代,純視覺方案識別距離的能力會逐步逼近甚至超越雷達系統。
1889
木火柴 ??? 4年前
自動駕駛卡車最可能實現Level 4? 
除了擁有購買這些車輛所需的資金外,商業實施更有可能將操作限制在特定的已知道路上,以及為自動駕駛車輛建立和執行公司特定的安全操作參數。* 來源:機器之心▊▊ 往期精選文章
1808
木火柴 ??? 4年前
20條/頁 
跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
