



【CATIA參數化設計】如實時更新零件下幾個不同密度的幾何體的重心的位置? 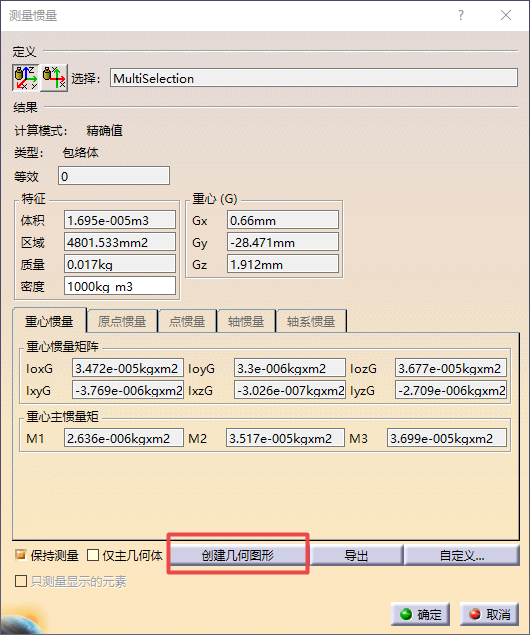
Set CenterOfGravity= hybridShapeFactory.AddNewPointCoord(Gx,Gy,Gz)CATIA參數化的方法:參數化的方法更為簡單一些,也更為實用。既然對于多幾何體的情形只能創建無參的重心點,那我們在創建完畢之后就手動的給其賦予參數,并讓其與測量結果中的重心參數Gx,Gy,Gz相關聯。
5676 1
CATIA助手 ??? 2年前
基于Catia和Abaqus的一種通用參數化建模及自動化仿真分析方法 
基于Catia的參數化建模 不失一般性,本文以如下圖結構作為示例,詳細介紹為實現通用結構的自動化仿真分析,采用商用CAD軟件Catia的參數化建模方法。
3333 2 1
TreatLee ??? 3年前
isight+catia 進行三維幾何參數化建模 

以假想導彈彈體頭錐參數化建模為例,介紹: catia參數化建模; catia宏錄制; isight集成catia,自動建立三維模型。
95 1
暴風影 ??? 5年前
基于CATIA的板簧參數化設計 
1、使用CATIA,通過知識工程進行板簧弧高、片數、寬度、各片長度、各片寬度及安裝接口完全參數化的板簧三維模型建立,讓設計人員能夠隨時通過參數更改板簧三維,無需重新繪制及裝配;2、正負弧高無需進行2次裝配,通過安裝接口參數化實現一次裝配就能夠完成正負弧高的切換;3、讓設計人員校核效率提升5倍!!!
1288 4
老李啊 ??? 5年前
CATIA參數化建模 
詳細介紹catia軟件進行參數化建模的過程,包括軟件基本設置,參數確定,關系建立,參數輸出等;有疑問建議隨時交流,共同進步!
554
湍流實驗室 ??? 7年前
CATIA參數化建模 
CATIA扳手參數化建模
1601
王二濤 ??? 3年前
使用 ANSYS 分析內燃機凸輪和從動組件的摩擦學參數 
網格中的元素必須考慮許多因素才能正確離散化應力梯度。我們試圖盡可能實現結構化網格。為此,我們將從動件的幾何形狀劃分為子部分。使用空間聲明中的“共享拓撲”選項,我們連接了相同部分的節點。我們執行了多區域、膨脹、邊緣尺寸調整、主體尺寸調整、面網格劃分等操作,以結構化方式對對象進行網格劃分。混合網格的 3D 網格由用于彈簧的 4 節點四面體元素和用于凸輪、活塞和底座的六面體元素創建。
4080 3
Infiniteelements ??? 2年前
CATIA裝配協同關聯設計及知識工程智能化解決方案New 
Top-Down– 上下文關聯設計中遇到的困境和挑戰Top-Down關聯設計幾個層級:第一個層面是簡單堆”砌式"建模,特點是:·CAD模型無總體控制驅動型參數(Specification)(建模特征仍然是有參數的)·無內嵌關聯知識(Knowledge)第二個層面常被稱為參數化建模,特點是:·局部參數驅動(Spec-Design)(開始有一點自頂向下設計的思路)
4867 2 1
CATIA助手 ??? 2年前
OCAD應用:凸輪曲線優化設計 
圖16.Excel 文件格式凸輪參數數據圖17.Word 文件格式凸輪參數數據
2266
畫屏 ??? 1年前
OCAD應用:凸輪曲線優化設計 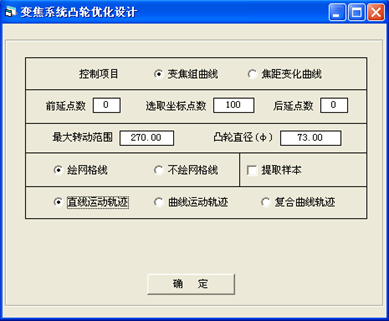
圖16.Excel 文件格式凸輪參數數據圖17.Word 文件格式凸輪參數數據
1660
信光嗎 ??? 1月前
基于CATIA的舵桿CAD/CAE一體化設計 
為提高舵桿結構設計效率,以某舵桿為例,在CATIA(Computer Aided Three-dimensional Interactive Application)零件模塊中對舵桿進行三維參數化建模,以其內徑為設計變量,通過工程數據鏈接,將舵桿三維參數化模型導入CATIA結構分析模塊中進行優化計算。
4112 9 3
CATIA助手 ??? 2年前
OCAD應用:凸輪曲線優化設計 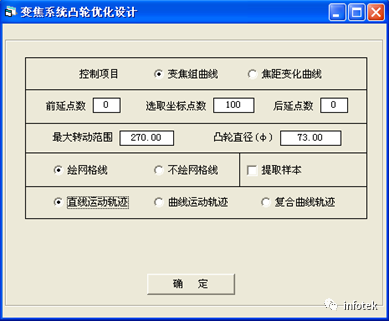
③ 凸輪曲線的非線性化處理 為了控制變焦組或系統焦距變化曲線,可以把曲線設計成直線形狀也可以按一定規律設計成二次或三次曲線形狀。直線形狀易于加工;曲線形狀可以根據需要調節運動曲線陡度(斜率)。當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。
1738
追光ing ??? 1年前
OCAD應用:凸輪曲線優化設計
③ 凸輪曲線的非線性化處理 為了控制變焦組或系統焦距變化曲線,可以把曲線設計成直線形狀也可以按一定規律設計成二次或三次曲線形狀。直線形狀易于加工;曲線形狀可以根據需要調節運動曲線陡度(斜率)。當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。
1729
追光ing ??? 11月前
OCAD應用:凸輪曲線優化設計
③ 凸輪曲線的非線性化處理 為了控制變焦組或系統焦距變化曲線,可以把曲線設計成直線形狀也可以按一定規律設計成二次或三次曲線形狀。直線形狀易于加工;曲線形狀可以根據需要調節運動曲線陡度(斜率)。當選擇曲線形狀時,接口要求填寫一個三次方程的三個系數的權因子值如圖11。所謂系數的權因子是指三個系數的相對值。三個系數的實際值將由程序自動規化處理。
2783
追光ing ??? 10月前
Comsol多體動力學剛柔耦合仿真方法 
總結:本文首先介紹了用Comsol進行多體動力學剛柔耦合分析的優點,之后用一個凸輪擺臂模型搭建了純剛體的多體動力學模型,然后把活塞部分轉化成了柔性體進行仿真從而來介紹剛柔耦合分析方法,最后提供了一個相類似的模型,讀者可以根據提供的小模型,自己動手實踐,按照文章的操作步驟選取某些部件進行柔性化。
6327 6
精品課程推薦 ??? 1年前
CATIA入門基礎建模:參數化設計 
3DEXPERIENCE CATIA軟件是達索系統CATIA軟件的最新版本,又稱為CATIA V6,該版本在V5版本的基礎上融合到了3DE平臺上,在原有功能基礎上還可以實現多專業、異地協同設計、數據版本管理、項目管理、庫文件管理等管理功能。通過本視頻您將快速入門CATIA最新版本的基礎建模操作。
1210 1
凱思軟件 ??? 4年前
基于CATIA的平衡懸架參數化建模(無聲) 
1、可實現10-14片多片簧參數化調整;2、可以調整各片寬度,各片長度,各種弧高;3、這種模型,校核非常方便;4、此課程無視頻教程,附件為10-14片的參數化模型。
118 1
老李啊 ??? 5年前
【CATIA知識點】CATIA_V5_大總成常用管理方法一 -高速緩存管理 
點擊確定,并重啟CATIA軟件。 可視化模式與設計模式互相切換設置高速緩存之后,下次打開組件(CATProduct)時,CATIA將以可視化模式加載所有部件。如果您想要編輯一個部件,右鍵單擊部件-展示-設計模式(反之也可將設計模式下的部件重新切換回可視化模式)。或者直接選擇某一個零件部件進行雙擊,然后便可以對零件參數或者特征進行修改,即進入了設計狀態。
5592
CATIA助手 ??? 2年前
達索系統CATIA數字化轉型配置包正式發布 
7、創成式曲面設計8、知識工程應用 完全包含黃金版價值; 高質量的曲面創建模塊,滿足企業研發造型創新需求; 提供多個功能強大且高質量的曲面創建命令; 強大的工程模板創建功能; 支持智能化的參數設計模式; 嵌入式設計規則的檢查;CATIA 基礎包 高性價比的全面功能,誠意之選!
2103 1
山東遠和致成 ??? 4年前
CATIA V5 零基礎全能設計課程
課程伊始,你將熟悉CATIA V5的操作界面、導航控制及工作環境自定義方法。隨后,在草圖工作臺中,通過網格、構造幾何體和高級草圖工具,筑牢**完全約束草圖**的設計基礎。 隨著課程推進,你將進入零件設計模塊,利用凸臺、凹槽、圓角、倒角、拔模、抽殼、加強筋、開槽和多截面實體等功能創建參數化三維模型。
2751
仿真資料吧 ??? 5月前
20條/頁 
 8
8 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
