



Transformer在BEV、2D/3D檢測上的應(yīng)用、量化與加速! 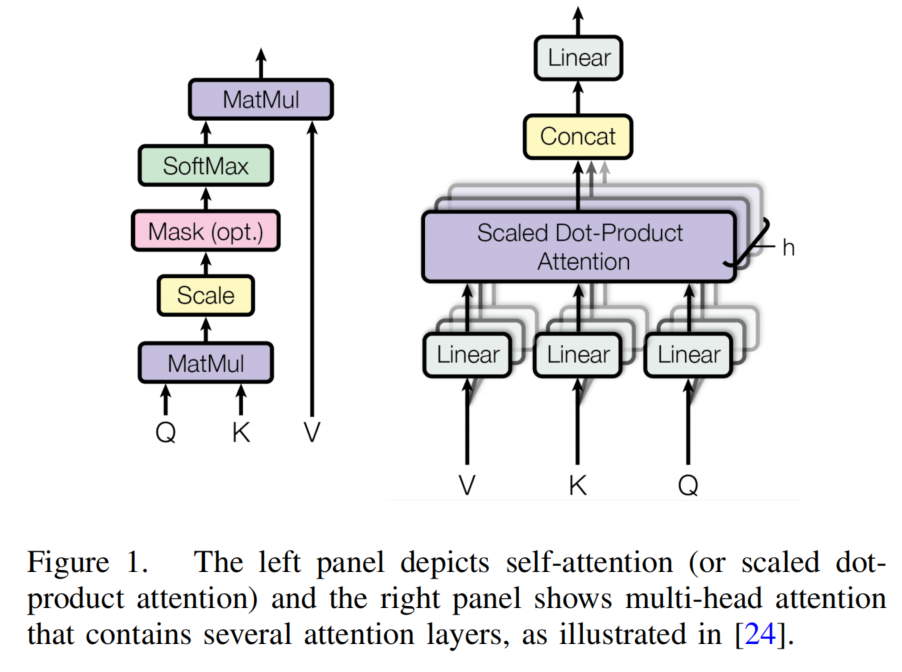
3.1、編碼器-解碼器設(shè)計盡管Transformer模型在自動駕駛應(yīng)用中實(shí)現(xiàn)了最先進(jìn)的性能,但其可觀的存儲和計算開銷對便攜式或邊緣設(shè)備的部署和高效推理提出了挑戰(zhàn)。感知任務(wù)的Transformer模型主要利用BEV特征,編碼器負(fù)責(zé)生成這些特征(圖4(b)和(d))。
4759 3 1
駕駛哥 ??? 2年前
康謀方案 | BEV感知技術(shù):多相機(jī)數(shù)據(jù)采集與高精度時間同步方案 
系統(tǒng)調(diào)試和部署:調(diào)試系統(tǒng)確保組件協(xié)同工作,部署到實(shí)際應(yīng)用環(huán)境。因此,在實(shí)際搭建過程中,常會遇到技術(shù)復(fù)雜性高、成本投入大、數(shù)據(jù)質(zhì)量與時間同步實(shí)現(xiàn)難、系統(tǒng)穩(wěn)定性與可靠性要求高等挑戰(zhàn)。針對這些問題,康謀推出一套BEV Camera數(shù)據(jù)采集方案,能高效搭建高質(zhì)量的BEV感知數(shù)據(jù)集,加速算法研發(fā)和訓(xùn)練。
2490
康謀keymotek ??? 1年前
基于模型的自動駕駛汽車端到端深度強(qiáng)化學(xué)習(xí)策略 
有條件的模仿學(xué)習(xí)是學(xué)習(xí)端到端駕駛策略的一種有效方法,這種方法可以部署在模擬和現(xiàn)實(shí)城市駕駛場景中。盡管如此,從高維視覺觀察和專家軌跡中學(xué)習(xí)端到端策略仍然是相對非常困難的。已有一些算法試圖通過超越純粹的模仿學(xué)習(xí)來克服這些困難。比如提出迭代數(shù)據(jù)集聚合,其方法是在部署期間可能經(jīng)歷的軌跡收集相應(yīng)的數(shù)據(jù)。其次,還可以使用 BeV 語義分割來監(jiān)督模型,讓學(xué)習(xí)者接觸專家數(shù)據(jù)的綜合擾動,以產(chǎn)生更穩(wěn)健的駕駛策略。
3904 2 1
駕駛哥 ??? 2年前
方案分享 | AVM合成數(shù)據(jù)仿真驗(yàn)證方案 
本文基于仿真軟件與腳本生成AVM圖像的流程如下所示: 圖1:基于aiSim構(gòu)建AVM圖像流程首先,在Unreal Engine中配置標(biāo)定投影參數(shù)所需的地圖,并在仿真器中為車輛部署4個方向的魚眼相機(jī);其次,基于相機(jī)內(nèi)參進(jìn)行去畸變,并記錄求解投影矩陣所需的關(guān)鍵參考值,例如AVM畫幅尺寸、參考點(diǎn)的相對坐標(biāo)、參考區(qū)域的大小與位置、車輛與參考區(qū)域的距離等;隨后,
2645
康謀keymotek ??? 1年前
高逼真合成數(shù)據(jù)助力智駕“看得更準(zhǔn)、學(xué)得更快” 
圖4 投影區(qū)域及BEV轉(zhuǎn)化示意圖4、多場景合成與傳感器布局優(yōu)化通過批量仿真腳本,可快速測試不同環(huán)境(如夜間、窄巷、地庫)、不同相機(jī)布局組合對AVM系統(tǒng)效果的影響。在算法不變的前提下,系統(tǒng)性評估外參配置的優(yōu)劣,為傳感器部署提供數(shù)據(jù)支持。
2508
康謀keymotek ??? 12月前
音視頻技術(shù)開發(fā)周刊 | 292 
如何在十分鐘內(nèi)部署Fastly的下一代WAF文章介紹了如何在不到10分鐘內(nèi)部署Fastly的下一代Web應(yīng)用程序防火墻(WAF)。作者提供了一個簡單易懂的步驟指南,幫助讀者快速部署Fastly的WAF。這些步驟包括創(chuàng)建Fastly賬戶、配置服務(wù)、設(shè)置防火墻規(guī)則以及測試WAF。
2301
聲學(xué)工程師小吳 ??? 3年前
國內(nèi)首款存算一體大算力芯片,瞄準(zhǔn)智能駕駛! 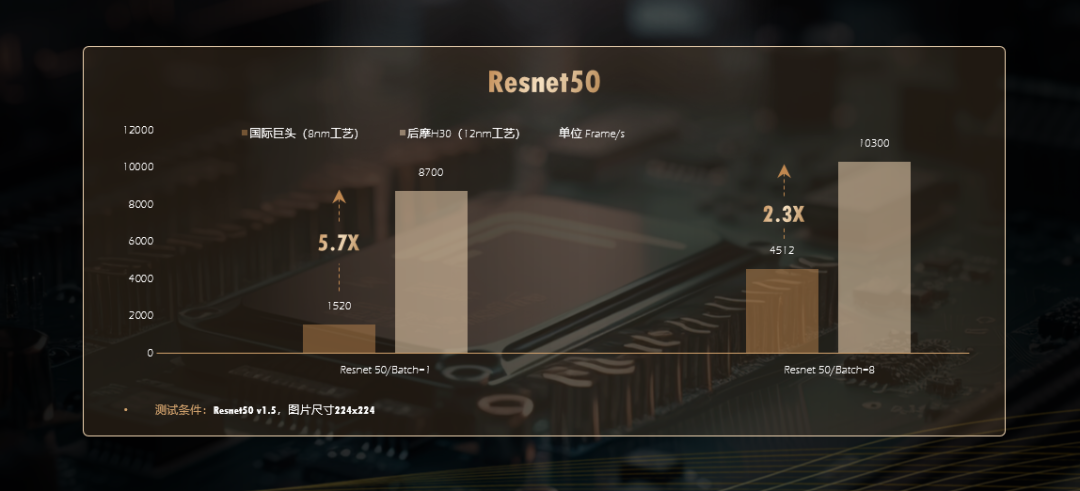
在這方面,鴻途H30芯片可以支持經(jīng)典的基礎(chǔ)網(wǎng)絡(luò)Resnet50,包括BEV網(wǎng)絡(luò)模型以及廣泛應(yīng)用于高階輔助駕駛領(lǐng)域的 Pointpillar網(wǎng)絡(luò)模型。 后摩智能創(chuàng)始人吳強(qiáng)也表示,從技術(shù)和產(chǎn)品需求匹配的角度來看,存算一體帶來的技術(shù)和產(chǎn)品的優(yōu)勢,和智能駕駛的關(guān)鍵需求是天然吻合的。
4121 1 2
平頭叔 ??? 3年前

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
