



賦能商用車 ADAS 研發(fā):多傳感器數(shù)據(jù)采集方案 
2、多傳感器標(biāo)定與采集高精度標(biāo)定是多傳感器數(shù)據(jù)有效融合的核心前提,更是為BEV模型空間對齊、跨模態(tài)融合提供精準(zhǔn)位姿基準(zhǔn)的關(guān)鍵。
2084
康謀keymotek ??? 2月前
【壓力傳感器的原理及應(yīng)用】- 米思米機(jī)械設(shè)備知識分享 
電子稱重系統(tǒng)既能組合在產(chǎn)品制造過程中優(yōu)化生產(chǎn),提高產(chǎn)品質(zhì)量,又能把有關(guān)生產(chǎn)過程中物料流動的數(shù)據(jù)加以采集并傳送到數(shù)據(jù)處理中心,作為在線庫存控制和財(cái)務(wù)結(jié)算之用。 通過集成技術(shù)將壓力傳感器與測量線路集成在一起,使得整個裝置的體積大大減小;另外屏蔽技術(shù)的發(fā)展,也將使得稱重壓力傳感器的抗干擾能力得到保障,使得稱重過程的自動化控制程度進(jìn)一步得到提高。
2107
MISUMI米 ??? 2年前
基于電阻仿真的無線傳感器風(fēng)能采集方法研究 
這些微小的無處不在的無線傳感器體積往往需要很小,才能使微型風(fēng)機(jī)產(chǎn)生的有限電能被使用。因此,MPPT的能量消耗和效率才是無線傳感器風(fēng)能采集系統(tǒng)非常重要的設(shè)計(jì)標(biāo)準(zhǔn),而不是MPPT的精度[17]。根據(jù)文獻(xiàn)[18]可知,MPPT算法可以分為間接和直接的方法。間接方法是基于一個數(shù)據(jù)表的使用,包括各項(xiàng)參數(shù)和數(shù)據(jù)。
3802 1
能源阿陽 ??? 2年前
網(wǎng)絡(luò)課程 | 5月18日添加布拉格光柵傳感器到經(jīng)典數(shù)據(jù)采集系統(tǒng) 
官網(wǎng): <HBM應(yīng)變片:應(yīng)力測試測量首選> <HBM稱重傳感器:稱重精度,久經(jīng)驗(yàn)證> <HBM力傳感器: 應(yīng)變和壓電兩種測量技術(shù)> <HBM扭矩傳感器和轉(zhuǎn)矩傳感器> <電功率測試 - 從部件到車輛能源管理> <數(shù)據(jù)采集系統(tǒng)與設(shè)備> 您還可以通過如下方式聯(lián)系我們,了解更多產(chǎn)品與應(yīng)用詳情: 郵箱:hbmchina@hbm.com.cn
2261
HBK測試與測量 ??? 4年前
知識分享 | 什么是壓力傳感器? 
官網(wǎng):<HBM應(yīng)變片:應(yīng)力測試測量首選><HBM稱重傳感器:稱重精度,久經(jīng)驗(yàn)證><HBM力傳感器: 應(yīng)變和壓電兩種測量技術(shù)><HBM扭矩傳感器和轉(zhuǎn)矩傳感器><電功率測試 - 從部件到車輛能源管理><數(shù)據(jù)采集系統(tǒng)與設(shè)備>您還可以通過如下方式聯(lián)系我們,了解更多產(chǎn)品與應(yīng)用詳情:郵箱:hbmchina@hbm.com.cn官網(wǎng):https://www.hbm.com
3577
HBK測試與測量 ??? 4年前
惡劣工況下的ADAS多源傳感器數(shù)據(jù)采集:從硬件抗干擾到算法泛化 
圖4 時間同步(PTP-E2E)配置 圖5 多傳感器數(shù)據(jù)采集3、適應(yīng)性與擴(kuò)展性惡劣工況的多樣性要求采集方案具備靈活的適配能力。硬件層面采用模塊化架構(gòu),支持根據(jù)場景需求增減傳感器接口、擴(kuò)展存儲容量或升級計(jì)算單元(如提升邊緣端實(shí)時處理能力)。
1959
康謀keymotek ??? 10月前
康謀應(yīng)用 | 基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng) 
該布局可以更有效的應(yīng)對海面復(fù)雜環(huán)境下的數(shù)據(jù)采集。
三、數(shù)據(jù)采集在面向無人艇數(shù)據(jù)采集時,需要使傳感器套件(四類傳感器)能夠同時采集數(shù)據(jù),并具備時間同步,實(shí)時可視化、存儲和回放等能力。整體軟件架構(gòu)采用ROS+傳感器集成方式,支持即插即用,使用便捷。
2321 2 1
康謀keymotek ??? 1年前
【米思米機(jī)械設(shè)備知識分享】- 壓力傳感器工作原理及應(yīng)用 
壓力傳感器在微創(chuàng)導(dǎo)管消融術(shù)和體溫傳感器測量中有著較好的應(yīng)用。 4.壓力傳感器在稱重系統(tǒng)中的應(yīng)用在很多壓力控制過程中,經(jīng)常需要采集壓力信號, 轉(zhuǎn)換成能夠進(jìn)行自動化控制的電信號。
2047
MISUMI米 ??? 3年前
分布式制冷壓力傳感器實(shí)現(xiàn)能耗最優(yōu)化的路徑? 
分布式制冷壓力傳感器實(shí)現(xiàn)能耗最優(yōu)化路徑 1、精準(zhǔn)監(jiān)測與實(shí)時反饋 ·多點(diǎn)布局監(jiān)測:在制冷系統(tǒng)蒸發(fā)器、冷凝器等關(guān)鍵部位分布安裝壓力傳感器,全面實(shí)時監(jiān)測壓力,獲取系統(tǒng)各環(huán)節(jié)壓力數(shù)據(jù)。 ·快速反饋機(jī)制:傳感器實(shí)時將壓力數(shù)據(jù)反饋給控制系統(tǒng),讓系統(tǒng)迅速掌握壓力變化,為調(diào)控提供依據(jù)。
823
博揚(yáng)智能 ??? 2月前
康謀技術(shù) | 多傳感器數(shù)據(jù)融合技術(shù)與策略解析 
① 運(yùn)動補(bǔ)償:確保數(shù)據(jù)時效性運(yùn)動補(bǔ)償是針對周期性采集數(shù)據(jù)的傳感器,如激光雷達(dá)(LiDAR),其數(shù)據(jù)采集周期可能長達(dá)100毫秒。由于車輛在運(yùn)動,采集周期的開始和結(jié)束時刻,車輛的位置已經(jīng)發(fā)生了變化。這就需要對采集的數(shù)據(jù)進(jìn)行運(yùn)動補(bǔ)償,以確保數(shù)據(jù)反映的是車輛在某一固定時刻的環(huán)境狀態(tài)。② 傳感器標(biāo)定:確立坐標(biāo)轉(zhuǎn)換傳感器標(biāo)定是確保每個傳感器的數(shù)據(jù)都能準(zhǔn)確映射到世界坐標(biāo)系中的過程。
2302
康謀keymotek ??? 1年前
添加布拉格光柵傳感器到經(jīng)典數(shù)據(jù)采集系統(tǒng) 

添加布拉格光柵傳感器到經(jīng)典數(shù)據(jù)采集系統(tǒng)添加布拉格光柵傳感器到經(jīng)典數(shù)據(jù)采集系統(tǒng)(免費(fèi)) 【已結(jié)束】 直播時間:5月18日 14:00適用人群:汽車、軌道交通、風(fēng)機(jī)、土木工程等行業(yè),從事產(chǎn)品測試、大型結(jié)構(gòu)監(jiān)測和維護(hù)的從業(yè)人員,相關(guān)測試設(shè)備從業(yè)人員,以及相關(guān)研究機(jī)構(gòu)和院校師生等。
1030
HBK測試與測量 ??? 4年前
光纖壓力傳感器在EMI環(huán)境中測量風(fēng)洞氣壓的應(yīng)用解決方案 
工采網(wǎng)提供的加拿大FISO 光纖壓力傳感器 - FOP-M是一種光纖壓力傳感器,主要用在可能出現(xiàn)高溫的場合,如航空和國防。除此之外,此款傳感器也是惡劣和危險(xiǎn)環(huán)境下一般工業(yè)應(yīng)用的有用工具。 FOP-M光纖壓力傳感器基于公認(rèn)的法布里-珀羅(Fabry-Perot)干涉原理 。傳感器的獨(dú)特設(shè)計(jì)基于對硅膜的偏析測量,這一點(diǎn)與傳統(tǒng)的壓力測量技術(shù)截然不同。
1954
工采網(wǎng) ??? 4年前
光纖壓力傳感器在則量工業(yè)設(shè)備氣體壓力中的應(yīng)用 
氣體壓力的檢測往往會用到氣體壓力傳感器,然后通過儀表或者顯示屏顯示出來,從而得出氣體的壓力,基于這個原理制造出了氣體壓力測量裝置用來檢測氣體的壓力,工采網(wǎng)提供的加拿大FISO 光纖壓力傳感器 - FOP-M的目的之一是使之能在高溫環(huán)境下工作。此外,光纖壓力傳感器FOP-M還具備以下優(yōu)點(diǎn):不受EI/RFI影響、尺寸小、可在惡劣環(huán)境下做可靠測量、精度高 以及耐腐蝕等。
1828
工采網(wǎng) ??? 4年前
高頻壓力傳感器頻響特性可分為三大類型 
(2)傳感器的封裝方式傳感器的封裝方式也是影響頻響特性的重要因素。相同固有頻率的傳感器芯片,采用不同的封裝方式,會直接影響傳感器能夠使用的頻響范圍。合理的封裝設(shè)計(jì)可以減小機(jī)械系統(tǒng)的慣性,提高傳感器的響應(yīng)速度。(3)采集設(shè)備的頻率響應(yīng)帶寬傳感器封裝完成后,需要配合后續(xù)的采集設(shè)備實(shí)現(xiàn)動態(tài)壓力的復(fù)現(xiàn)。
2345
博揚(yáng)智能 ??? 9月前
壓力傳感器的簡述 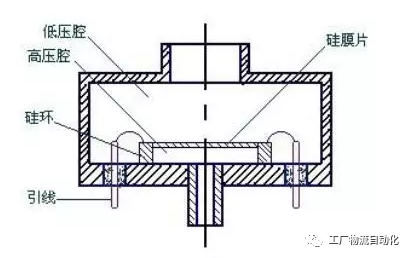
壓力傳感器有好多種,主要有: 1)利用晶體的壓電效應(yīng)的效應(yīng)傳感器 2)壓力傳感器是工業(yè)實(shí)踐中最為常用的一種傳感器,而我們通常使用的壓力傳感器主要是利用壓電效應(yīng)制造而成的,這樣的傳感器也稱為壓電傳感器。 在現(xiàn)在壓力效應(yīng)也應(yīng)用在多晶體上,比如現(xiàn)在的壓力陶瓷,包括鈦酸鋇壓力陶瓷、PZT、鈮酸鹽系壓力陶瓷、鈮鎂酸鉛壓力陶瓷等等。
2278
工廠物流自動化 ??? 3年前
液壓用壓力傳感器的選型 
壓力傳感器的性能參數(shù)有額定壓力范圍、最大壓力范圍、損壞壓力、溫度范圍、非線性、重復(fù)性、輸入阻抗、輸出阻抗等,在選擇液壓壓力傳感器時,我們必須關(guān)注以下參數(shù):1.量程指壓力傳感器的額定載荷,一般單位為KGf、N等。如量程為100KGf,傳感器測量范圍則為0-100KGf。關(guān)注公眾號“液壓說”,獲取更多液壓知識。
2520
液壓說 ??? 3年前
液壓用壓力傳感器的原理及應(yīng)用 
輔助電源作為一個產(chǎn)品必須標(biāo)明供電的要求,但不作為壓力傳感器的組成部分。現(xiàn)在壓力傳感器一般情況都會配備輔助電源方便客戶供電使用。02壓力傳感器的工作原理及分類1、壓力傳感器的工作原理壓力直接作用在傳感器的膜片上,使膜片產(chǎn)生與介質(zhì)壓力成正比的微位移,使傳感器的電阻發(fā)生變化,和用電子線路檢測這一變化,并轉(zhuǎn)換輸出一個對應(yīng)于這個壓力的標(biāo)準(zhǔn)信號。
3633 1
液壓說 ??? 3年前
制冷壓力傳感器在精細(xì)蒸發(fā)控制中的無縫協(xié)同? 
準(zhǔn)確的壓力值使得系統(tǒng)能夠在最佳條件下運(yùn)行,避免不必要的能量損耗。 1、壓力傳感助力精細(xì)蒸發(fā)控制 ·精準(zhǔn)監(jiān)測:制冷壓力傳感器實(shí)時精確測量蒸發(fā)器內(nèi)壓力,反映制冷劑汽化狀態(tài)。因壓力與汽化程度緊密相關(guān),可據(jù)此了解蒸發(fā)進(jìn)展。 ·反饋調(diào)節(jié):將壓力數(shù)據(jù)反饋給控制系統(tǒng),系統(tǒng)依此調(diào)節(jié)膨脹閥開度。壓力高時,關(guān)小閥門,減少制冷劑流入;壓力低則反之,確保蒸發(fā)穩(wěn)定。
2032 1 1
博揚(yáng)智能 ??? 7月前
如何有效減少自動駕駛中傳感器數(shù)據(jù)的存儲量 
在數(shù)據(jù)采集的過程中,通過觸發(fā)式的機(jī)械連接和軟件時間同步,讓不同模態(tài)的傳感器數(shù)據(jù)打上高精度的時間戳,一方面便于數(shù)據(jù)管理,減少無效數(shù)據(jù)落盤,另一方面充分有利于算法訓(xùn)練。
2322
康謀keymotek ??? 2年前
提高氣體壓力傳感器精度的方法和精度重要性! 
氣體壓力傳感器精度對于許多應(yīng)用來說至關(guān)重要。無論是在工業(yè)領(lǐng)域還是科學(xué)研究中,準(zhǔn)確測量氣體壓力是確保系統(tǒng)正常運(yùn)行的關(guān)鍵因素之一。本文博揚(yáng)智能將探討氣體壓力傳感器精度的重要性以及提高其精度的方法。 (1)氣體壓力傳感器的精度。 精度是指傳感器輸出值與實(shí)際值之間的誤差。對于氣體壓力傳感器而言,精度表示傳感器輸出值與被測壓力的實(shí)際值之間的差異。
2212
博揚(yáng)智能 ??? 2年前
20條/頁 
 177
177 跳至頁

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP
