



自動駕駛汽車中的激光雷達和攝像頭傳感器融合 
來源 | 汽車電子與軟件傳感器融合是自動駕駛汽車的關鍵技術之一。這是自動駕駛汽車工程師都必須具備的技能。原因很簡單:感知無處不在,無時無刻不在使用。自動駕駛汽車通過4個關鍵技術工作:感知、定位、規(guī)劃和控制。 傳感器融合是感知模塊的一部分。
2426
駕駛哥 ??? 4年前
干貨|自動駕駛系統(tǒng)中感知傳感器實物仿真測試環(huán)境構建 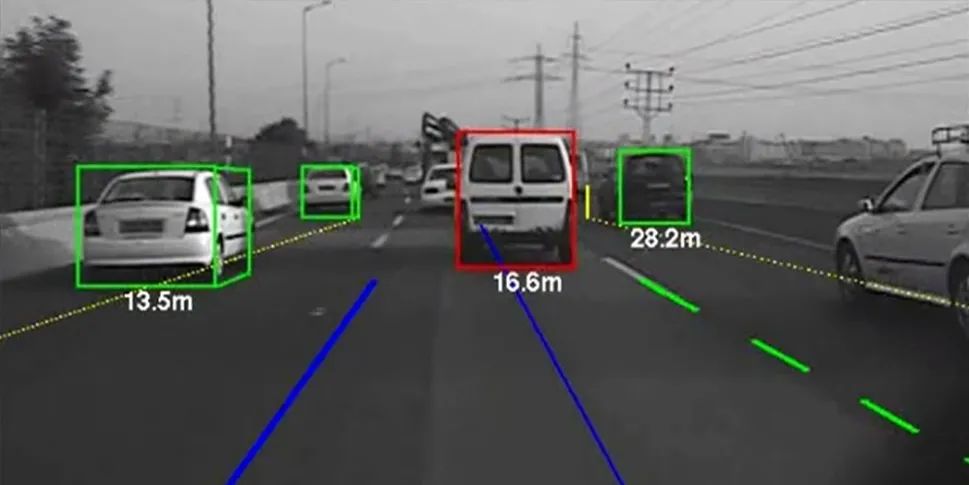
從自動駕駛模擬仿真測試產業(yè)發(fā)展需求角度出發(fā),目前可以實現(xiàn)的感知傳感器環(huán)境構建方案還相對較少,后續(xù)自動駕駛整車級模擬仿真測試環(huán)境中,必定需要多類型感知傳感器融合仿真測試環(huán)境。這對感知傳感器實物仿真測試環(huán)境構建提出了更高的要求,也期待有更多更優(yōu)先的構建方法和創(chuàng)新型構想被提出。---END---作者:北斗文章來源:汽車測試網(wǎng)
4041
EDC電驅未來 ??? 2年前
康謀技術 | 多傳感器數(shù)據(jù)融合技術與策略解析 
在汽車行業(yè)邁向智能化、自動化的今天,自動駕駛技術也在快速發(fā)展。為了進一步讓自動駕駛更加“智能化”,像老師傅一樣進行開車,離不開對車輛周圍環(huán)境的全面認識。面對復雜的感知任務,單一傳感器的局限性逐漸顯現(xiàn),比如相機對目標的顏色和紋理比較敏感,但易受光照、天氣條件的影響。LiDAR以獲得目標精確的3D信息,但無法獲得目標紋理,易產生噪點等情況。
2301
康謀keymotek ??? 1年前
自動駕駛多傳感器數(shù)據(jù)融合方法 
在自動駕駛領域,多模態(tài)數(shù)據(jù)通常包括安裝在車輛上的多個傳感器,包括雷達、立體可見光攝像頭、紅外攝像頭、GPS等,為執(zhí)行自動巡航,從傳感器收集的異構數(shù)據(jù)用于學習許多相互關聯(lián)但復雜的任務,如定位和測繪、場景識別、路徑規(guī)劃和駕駛員狀態(tài)識別等。大多數(shù)先進的融合方法集中于如何融合來自多模態(tài)空間的信息或特征。根據(jù)多模態(tài)信息的融合策略主要可以分為早期融合、中期融合和晚期融合。
2606 1
康謀keymotek ??? 2年前
自動駕駛系統(tǒng)的傳感器標定方法 
來源 | 自動駕駛之心、計算機視覺life導讀:傳感器標定是自動駕駛的基本需求,一個車上裝了多個/多種傳感器,而它們之間的坐標關系是需要確定的。灣區(qū)自動駕駛創(chuàng)業(yè)公司ZooX的co-founder和CTO是Sebastia Thrun的學生Jesse Levinson,他的博士論文就是傳感器標定。
2297
駕駛哥 ??? 3年前
設計仿真 | 基于VTD的多物理傳感器自動駕駛系統(tǒng)仿真方案 
隨著自動駕駛算法等級的不斷提高,各開發(fā)商的傳感器布置方案也越來越豐富,最典型的為多V、多R及多L的方案。而在對多種類,多數(shù)量的傳感器進行物理模型仿真時,會占用大量的計算資源和網(wǎng)絡通訊資源,同時仿真的效果還受到PCIe總線帶寬及顯卡的接口數(shù)量限制。
2402
海克斯康設計與仿真 ??? 2年前
康謀技術 | 自動駕駛傳感器標定技術:從單一到聯(lián)合標定 
圖片來源于網(wǎng)絡總的來說,標定是自動駕駛數(shù)據(jù)采集中必要的一環(huán),它確保了以多傳感器為核心的采集系統(tǒng)能夠提供精確、可靠的環(huán)境感知信息。通過精確的聯(lián)合標定,自動駕駛車輛能夠更好地理解其周圍環(huán)境,做出快速準確的決策,從而提高自動駕駛的安全性和可靠性。
2256
康謀keymotek ??? 1年前
康謀分享 | 基于多傳感器數(shù)據(jù)的自動駕駛仿真確定性驗證 
圖1 aiSim多傳感器融合示例目前,許多市面上的仿真軟件,尤其是基于游戲引擎開發(fā)的平臺,其核心設計目標之一是高效地為玩家提供充滿驚喜和變化的娛樂體驗。這種內在的隨機性,在游戲世界里是優(yōu)點,但在嚴謹?shù)?em>汽車測試領域,卻是一個致命的缺陷。想象一下在仿真測試過程中,工程師精心設置了所有參數(shù)——車輛速度、行人軌跡、天氣狀況、傳感器配置——期望能穩(wěn)定復現(xiàn)一個特定的危險場景。
2864
康謀keymotek ??? 10月前
賦能商用車 ADAS 研發(fā):多傳感器數(shù)據(jù)采集方案 
隨著自動駕駛技術的迭代升級,商用車ADAS的研發(fā)進程已成為行業(yè)焦點。近期,在和眾多商用車ADAS研發(fā)客戶的溝通過程中,我們觀察到了一些被頻繁提到的客戶需求和場景痛點,針對于此,本文為該類客戶量身定制了一套高性能商用車ADAS多傳感器數(shù)據(jù)采集方案。本文將從客戶的實際痛點出發(fā),詳細拆解如何在復雜工況、多車型適配等需求下,實現(xiàn)高精度、多傳感器的數(shù)據(jù)融合與采集。
2083
康謀keymotek ??? 2月前
高校科研多傳感器時間同步方案 
</p><p>本文將拆解<strong>時間同步核心難題</strong>,介紹<strong>多傳感器時間同步方案</strong>概況與<strong>應用價值</strong>,旨在幫助高校團隊實現(xiàn)高質量、可復現(xiàn)、省算力的多傳感器時間同步落地方案。
2156
康謀keymotek ??? 6月前
一輛新能源汽車需要多少顆傳感器? 
這些傳感器共同工作,為汽車提供了強大的感知和控制能力,使新能源汽車在性能、安全、節(jié)能等方面都有了顯著提升。隨著技術的進步,未來新能源汽車的傳感器數(shù)量和種類還將繼續(xù)增加。例如,更先進的自動駕駛技術需要更多的傳感器來感知周圍環(huán)境,實現(xiàn)更高級別的自動駕駛。此外,隨著物聯(lián)網(wǎng)、5G等技術的發(fā)展,新能源汽車也將與周圍環(huán)境、其他車輛、基礎設施等實現(xiàn)更緊密的連接和交互,這也需要更多的傳感器來支持。
2351
大愛技術 ??? 2年前
新能源汽車中會用到哪些傳感器技術? 
隨著汽車智能化技術的不斷成熟應用,人們對汽車的智能網(wǎng)聯(lián)化需求更加突出,尤其是在某些體驗感很深的座艙、自動駕駛等領域,車內環(huán)境也已經成為消費者的購車關注的焦點,這將直接推動汽車電子空氣類傳感器產品的加速發(fā)展。工采網(wǎng)小編為大家介紹新能源汽車中,會用到哪些傳感器技術。空氣質量傳感器就可以實時監(jiān)測車內空氣質量。車內空氣污染指汽車內部由于不通風、車體裝修等原因造成的空氣質量差的情況。
1959
大愛技術 ??? 4年前
汽車碰撞傳感器原理剖析 
一般情況下,汽車會在三個主要地方都安裝碰撞傳感器,左前、右前器和中央 汽車一般設有多個觸發(fā)碰撞傳感器,安裝位置一般在車身的前部和中部,例如車身兩側的翼子板內側、前照燈支架下面以及發(fā)動機散熱器支架兩側等部位。隨著碰撞傳感器制造技術的發(fā)展,有些汽車將觸發(fā)碰撞傳感器安裝在氣囊電腦內。
2538
木火柴 ??? 4年前
多種智能傳感器實現(xiàn)車載空氣凈化系統(tǒng)解決方案 
位于汽車車廂內的通風道中的溫濕度傳感器,一般有1-2個,測量車內的溫度,將信號傳送給自動空調的電子控制單元,調整適合人體的車內溫度。
1872
大愛技術 ??? 4年前
康謀應用 | 基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng) 
基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng)方案,利用高性能的BRICKplus+ETH6000模塊作為中央處理單元,連接多個傳感器,能夠實現(xiàn)高速數(shù)據(jù)傳輸和同步。該系統(tǒng)采用ROS框架與傳感器SDK進行定制開發(fā),實現(xiàn)了多線程數(shù)據(jù)采集、處理和發(fā)布。同時支持配置文件動態(tài)加載傳感器參數(shù),支持實時調整和優(yōu)化,進而顯著提高了數(shù)據(jù)采集的同步性、實時性和可靠性,為無人艇的自主航行和控制算法訓練提供了高質量的數(shù)據(jù)支持。
2320 2 1
康謀keymotek ??? 1年前
看看我們離世界頂級傳感器技術有多遠 
智能汽車和無人駕駛是驅動MEMS傳感器發(fā)展的重要動力。在智能汽車時代,將會使用大量的MEMS運動傳感器實現(xiàn)主動安全技術:語音將成為人與智能汽車的重要交互方式,MEMS麥克風將迎來發(fā)展新機遇。自動駕駛技術的興起,進一步推動了MEMS傳感器進入汽車。汽車行業(yè)占據(jù)整個MEMS市場份額超過30%,2015年全球汽車MEMS行業(yè)營收為37.3億美元。
2019
技術鄰CAD學習 ??? 3年前
紐扣式一氧化碳傳感器助力新能源汽車鋰電池安全 
及時發(fā)現(xiàn)隱患,并通過預警系統(tǒng)提醒駕駛員,則顯得尤為關鍵。工采網(wǎng)代理的多款傳感器都可以集成到新能源汽車鋰離子動力電池的火災防控檢測模組中,并針對動力電池熱失控進行監(jiān)控。監(jiān)測模塊通過一氧化碳、煙霧和溫度傳感器,對新能源汽車鋰電池的狀態(tài)進行實時監(jiān)測。
2079
大愛技術 ??? 3年前
一文讀懂汽車芯片--圖像傳感器芯片及車規(guī)AEC-Q100認證 
該4顆CIS負責采集對應圖像信息,并通過算法投射到汽車主機中控上形成鳥瞰圖,視野全方位覆蓋車身周圍。除全景環(huán)視應用外, 底盤透視影像系統(tǒng)也作為差異化方案提出,以實現(xiàn)更高安全系數(shù)的自動泊車。
2743
falab ??? 2年前
如何有效減少自動駕駛中傳感器數(shù)據(jù)的存儲量 
</p><h2>3、專注所需場景</h2><p>目前,隨著傳感器技術的和算法的進步,自動駕駛算法/系統(tǒng)已經能夠應對99%的場景,這是因為各個算法已經獲得了PB甚至EB級別的數(shù)據(jù),覆蓋了生活中的絕大多數(shù)場景。為了去應對剩下1%的邊緣場景,實際上,讓數(shù)采車直接進行上路進行數(shù)據(jù)采集,將會有大量的重復數(shù)據(jù),并且需要數(shù)據(jù)團隊需要花費相當多的時間在其中尋找到目標數(shù)據(jù)。
2320
康謀keymotek ??? 2年前
應用在汽車電子控溫器中的多路數(shù)字溫度傳感芯片 
控制單元將計算好的結果輸出給空調系統(tǒng),控制空調系統(tǒng)啟動、停止或進行制冷或制熱操作,從而達到駕駛者所設定的溫度值。相較于傳統(tǒng)車載空調系統(tǒng),汽車電子溫控器具有更加智能化的優(yōu)勢,能夠根據(jù)環(huán)境變化進行自動調節(jié)。例如,在日出、日落或者進入高速路等情況下,汽車電子溫控器都能根據(jù)實時環(huán)境數(shù)據(jù)智能調節(jié)溫度,提供更加舒適的駕乘體驗。
2192
如果我年少有為 ??? 2年前
20條/頁 
 321
321 跳至頁

技術鄰APP
工程師必備
工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP
