汽車CAE仿真知識點整理

----------僅用于相互交流與學習,不用于營利
一、做仿真分析報告的總體框架:
1、分析目的(背景及意義):通常為法律法規要求,設計驗證校核需要等;
2、分析工況介紹;
3、材料說明,材料名稱、彈性模量、泊松比、密度、屈服強度、抗拉強度等;
4、結構示意圖,分析模型的約束及加載;
5、每種工況對應的分析結果圖,判定結果表:材料牌號、屈服強度、抗拉強度、最大應力、判定結果;
6、總結及建議,結果表:分析項目、屈服強度、抗拉強度、最大應力、是否滿足設計要求。綜合結論;
二、白車身扭轉剛度仿真分析

繪制扭轉剛度曲線需要在承載式白車身底部前縱梁、門檻梁、后縱梁上選取一系列的點。X取值:每間隔100mm取一個點,讀取它們的坐標值及在Z向的位移,根據每對左右取值點的Y向距離值、Z向位移值求出扭轉角。
三、白車身彎曲剛度仿真分析
邊界條件:約束白車身前左、右減震器Y、Z二個方向的平動自由度;約束白車身后左、右彈簧座X、Y、Z三個方向的平動自由度。
加載:載荷作用于座椅安裝點,前排各1000N,后排座椅2000N;
變形量測點分布于前后縱梁和門檻。

在車身縱梁下部和門檻梁下部分布一系列考核點,通過考核點的X坐標和Z向變形量繪制彎曲剛度曲線。

繪制白車身彎曲剛度變形曲線。

各車型彎曲剛度要求:A級車彎曲剛度不小于10000N/mm;B、C級車彎曲剛度不小于14000N/mm。
各門框及窗框對角線變形量以參考車型為準,一般要求門框變形量小于0.2%。
K=P/Dmax,K為車身整體彎曲剛度;其中P為加載的彎曲載荷總和(通常為4000N);Dmax為縱梁、門檻梁位移系列中Z向最大的位移點的變形值,這個點一般位于門檻下方。(通常取縱梁、門檻梁上兩數據點Z向位移的平均值)
計算的彎曲剛度變形曲線連續變化,無突變。
形貌優化:
加強筋設置


optistruct創建非線性材料步驟:
進入Utility菜單,選擇table create
在create table欄中選取tables1,點擊next

出現create/edit tables1后,給予應力應變曲線一個名稱,x軸輸入應變,y軸輸入應力

在材料卡片中創建一個mat1的卡片,點擊create/edit
在MAT1這一行中輸入楊氏模量,泊松比和密度
在圖表的下方勾選MATS1
在TID中選擇剛剛創建好的應力應變曲線,type選plastic,Limit輸入彈性極限

輸入完畢后,選擇return,材料非線性賦予完畢。
最大主應力提取:

0D/1D單元
外表越簡單,內涵越豐富,說的大概就是0D/1D單元吧。這部分內容涉及到很多求解器的概念,考慮到不同求解器有不同的0D/1D單元,本文以OptiStruct求解器為例,結合實例為大家形象地講解。
0D單元
簡單地說,0D單元就是一個點。
為什么需要這個點呢?
有可能是為了減少計算量,希望把實際中的一個不重要的復雜零件簡化為一個質量點,只考慮零件的質量和慣量(忽略該零件的剛度、形狀等特性)。也有可能是把實際中的一個焊點/螺栓/鉚釘/粘膠/銷簡化為一個初始長度為0的數學彈簧或者將一個彈簧阻尼器簡化為一個數學上的初始長度為0的彈簧阻尼器。
質量點單元
本文只能告訴你怎么簡化,至于該不該簡化是工程師應該想的事。
質量是質點或質點系平動慣性的度量:
F=ma
質點系的質量就是各個質量的算術和
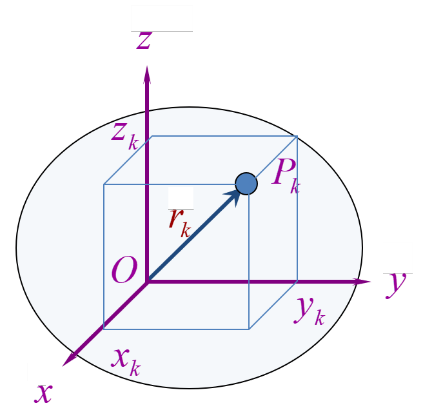
轉動慣量是質點或質點系轉動慣性的度量
J = m / α
質點系的慣量計算方法如下(對坐標軸)
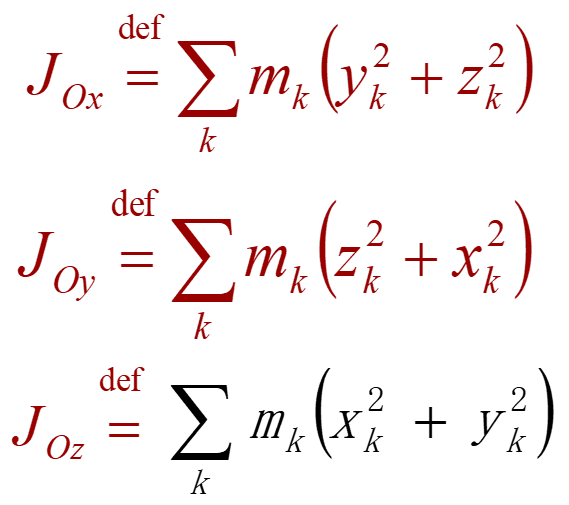
當然,以上公式了解一下就行,如果你有一個2D或者3D模型,賦好材料屬性后HyperMesh可以直接獲取一個零件的質量和慣量。
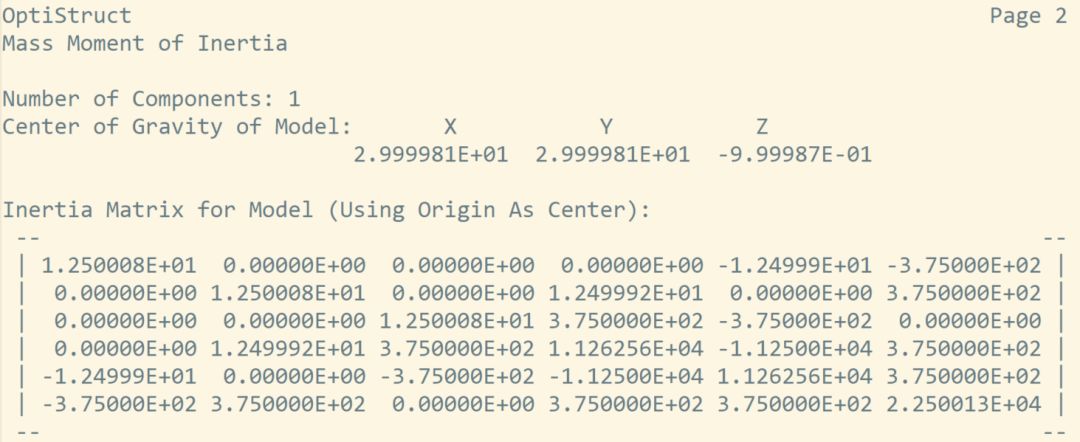
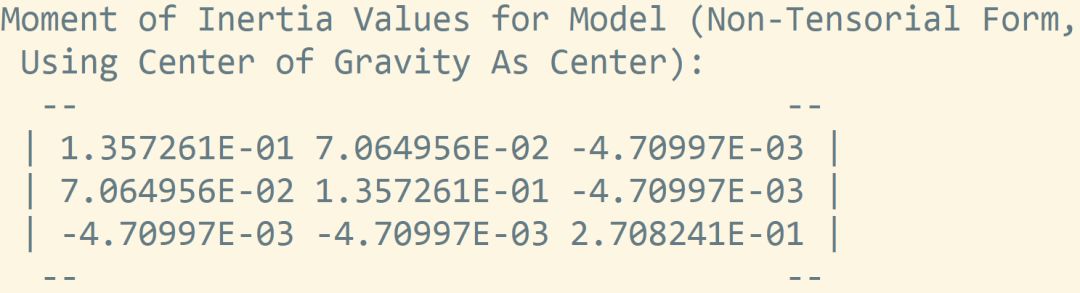
得到的信息如下(多個頁面):
第一個頁面是質量與慣量信息,其中慣量是基于全局坐標系計算得到的。

第二個頁面是第一頁信息的張量表示
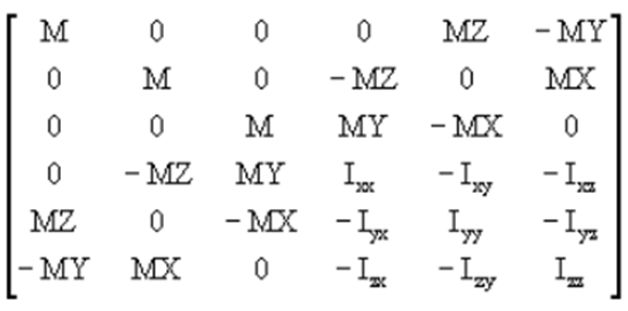
注意!
右下3x3矩陣的非對角線元素值是Ixy,Ixz,Iyz的相反數;
第三個頁面是在質心位置平行于全局坐標系方向計算的相應值(張量表示);
同樣的,6x6矩陣的右下3x3矩陣的非對角線元素取的是Ixy,Ixz,Iyz的相反數。
hanf
獲得這些值后如何創建一個質量點來替代實際零件呢?
可以按照以下設置進行 ?
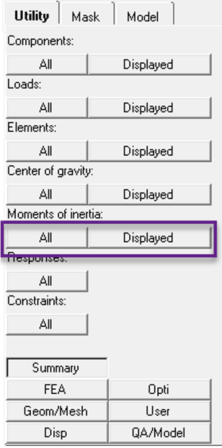
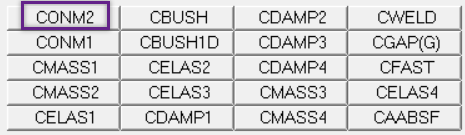
首先,為了告訴軟件這個點具體表示什么(質量點還是0長度彈簧等),需要用戶進入1D > Elem types面板,進行單元類型設置。

CONM2表示質量點單元
選好單元類型后,進入1D > masses面板,進行質量點單元的創建。

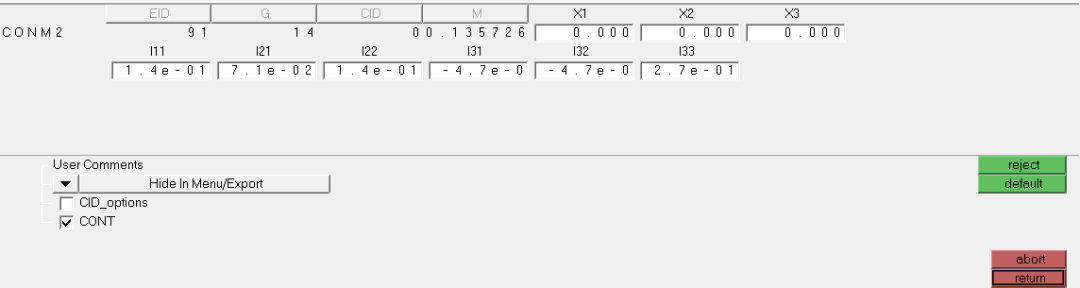
默認情況下,按上述方法創建的質量點是沒有慣量的,如果需要考慮慣量,可以使用工具欄上的card edit按鈕(見下圖)進行修改。
下圖中沒有選擇CID_options,也就是使用默認的質心位置為坐標系原點,坐標軸方向平行全局坐標系。這時只需要設置質量大小和3x3的慣量矩陣(副對角線的兩個3x3子矩陣全為零)。數值的大小直接取summary第三頁的最后一個矩陣中的值即可(如果從6x6矩陣的右下角3x3矩陣取值則需要加上負號)。
如果你的慣量數據是在某個特定坐標系(通常就是主慣性軸)下測得的,建議設置一個局部坐標系(當前版本HyperMesh界面下不支持該操作,需要編輯fem文件)并輸入I11,I22,I33。
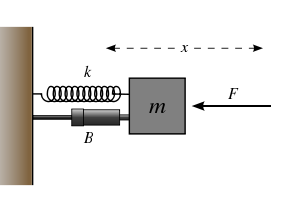
彈簧單元
另一種常用的0D單元是彈簧單元,目前OptiStruct中最常用的彈簧單元是零長度具有6方向剛度的cbush單元。用于模擬彈簧阻尼器以及各種零件之間的連接關系(固接,鉸接及各種其它運動副)。
Cbush單元比較復雜,OptiStruct中的關鍵字如下
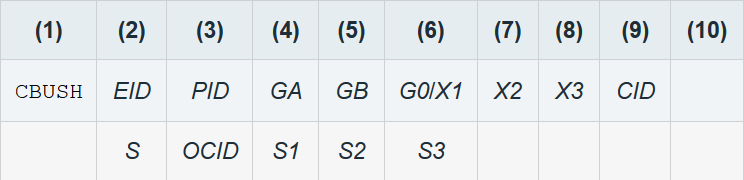
用戶需要指定:
1.兩個節點,通常要求這兩個節點的空間位置相同(否則求解器會報警告)
2.屬性,包括各個方向的剛度/阻尼/質量等信息
3.方向矢量,各種剛度等參數都是在該方向下定義的,最簡單的方法是指定一個局部坐標系。
接下來通過具體的例子進行講解~
例1 |
模擬彈簧阻尼器 |
輸入模型如下圖:
模型中有2個RBE2單元(剛性單元,后面馬上就講到了),獨立節點都在中間位置(坐標完全一致),模型已經在中間位置定義好一個直角坐標系。
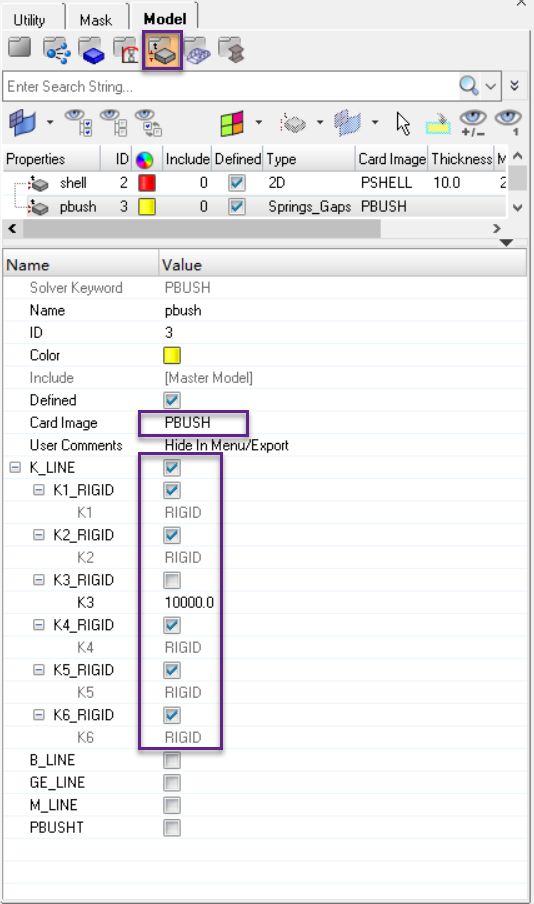
Step 1. 創建pbush屬性,除了K3方向外的其余5個方向都定義為剛性
Step 2. 激活重復對象選擇功能(快捷鍵o或者下拉菜單Preferences > graphics)

Step 3. 進入面板區1D > springs創建cbush單元,設置如下
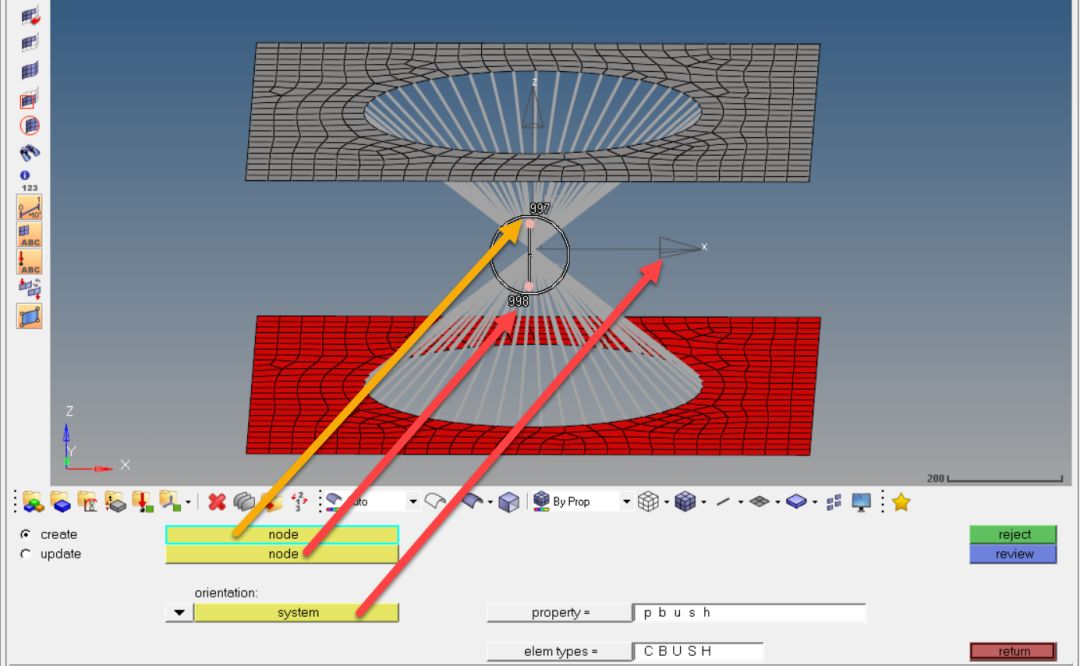
注意!
面板里面的兩個node要分別選擇兩個不同的節點,方法是在節點位置點擊后會出現下圖中的圓形圖標,這時將鼠標緩慢移動到要選擇的節點位置附近,然后再次點擊鼠標左鍵即可選中。
例2 |
模擬球鉸 |
重復上例中的Step1至Step3,只需在Step1中修改pbush的剛度選項如下,其它設置完全一樣,即為球鉸。
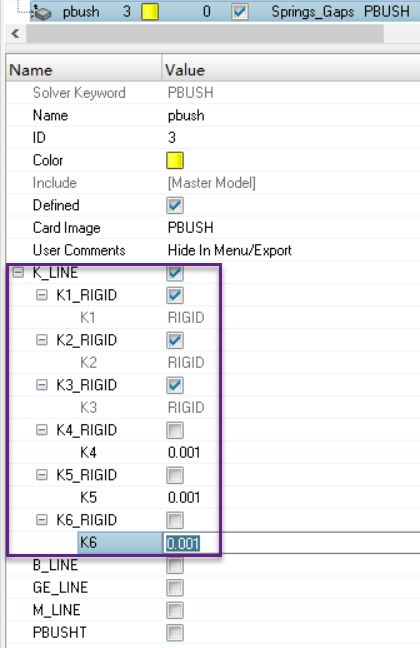
這里的轉動剛度設定值0.001是隨意給定的,該值只要足夠小,在實際中可忽略不計即可,等效于釋放了該方向自由度。但若給定太小的剛度值(比如1e-6以下)可能導致剛度矩陣病態。
擴 展
實際結構中的其它各種約束條件都可以通過類似的自由度釋放的方式來實現。比如圓柱副、平面副、萬向節等。
需要注意的是:在線性靜力分析中,平面副之類的多自由度鉸,如果設置不當,會引發求解器的剛體位移問題。
實際上,在非線性工況下OptiStruct還提供了一個更加便捷的鉸鏈創建工具——JOINTG(2017.3以后版本)
HyperMesh對應的界面在面板區1D > joints

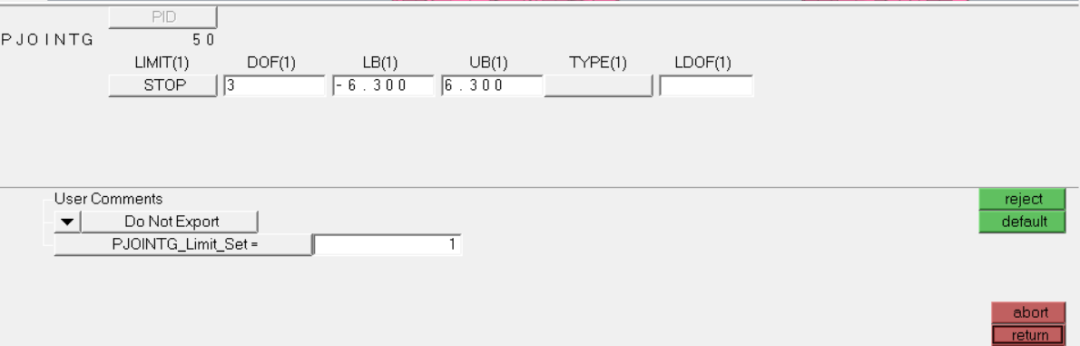
某些鉸鏈需要通過PJOINTG屬性定義相關的參數
相關的關鍵字示例如下:

如想進一步了解jointg的使用方法可以通過以下鏈接中的文件學習
學習文件下載鏈接如下https://pan.baidu.com/s/1eSYMOxFfOFcPrUSD2GCU8g
例4 |
深溝球軸承建模 |
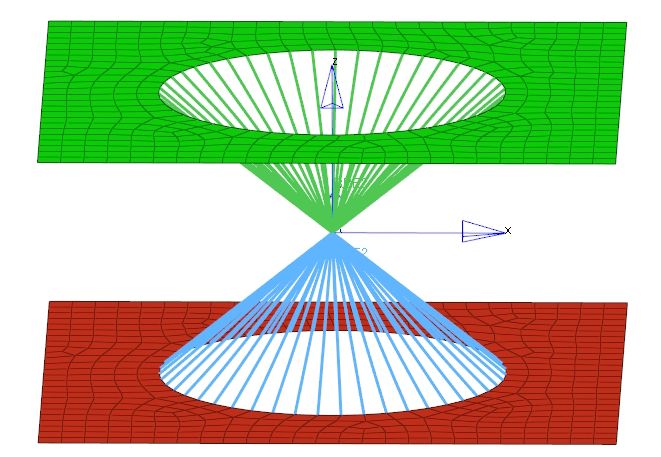
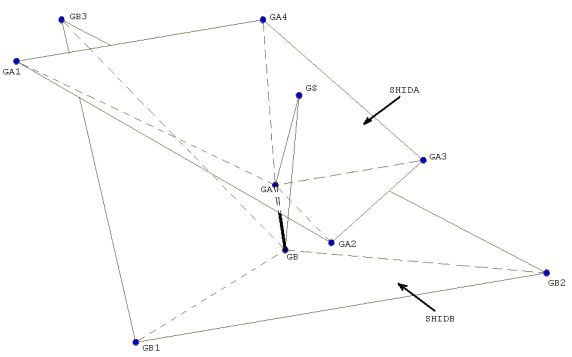
典型的深溝球軸承結構如下圖,是傳動系統精確建模的關鍵之一,通常內圈和外圈采用實體建模,滾子采用彈簧單元進行簡化。考慮到實際的滾子是接觸傳力,所以應該采用抗壓不抗拉的非線性彈簧單元進行建模(非線性剛度,所以必須是非線性工況)。
根據接觸傳力的特點:
1. 接觸面的力的方向垂直于曲面法向
2. 滾子受力若要平衡,兩端的力必須要在同一條直線上
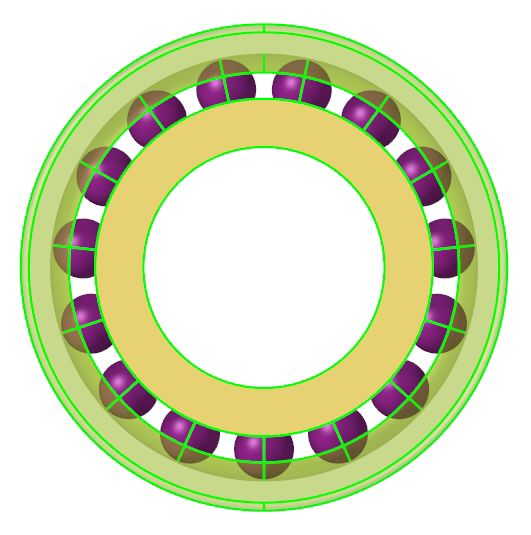
取一個滾子位置演示如何在HyperMesh中進行建模
Step 1. 從整體模型中取出一個滾子的部分
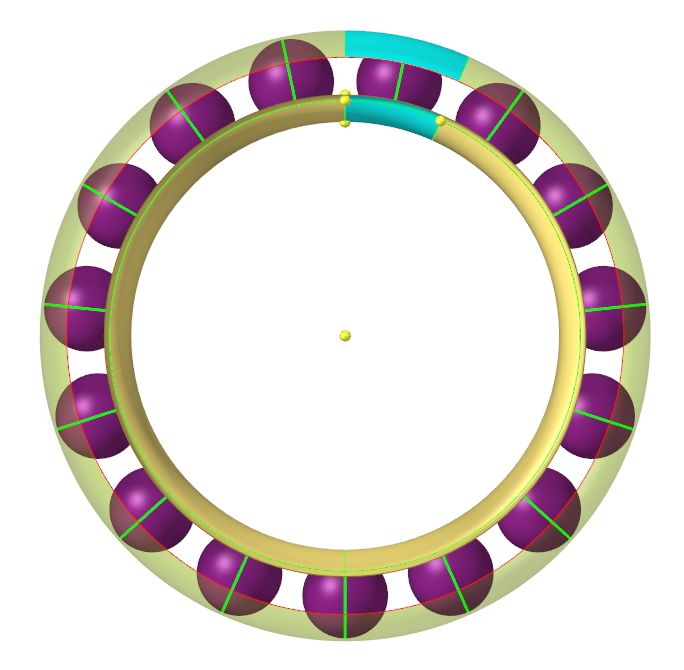
Step 2. 沿著這個部分的中心位置切開,并按照彈簧的數量撒點(假定是10根彈簧,彈簧的剛度參數需要通過實驗對標得到具體值)
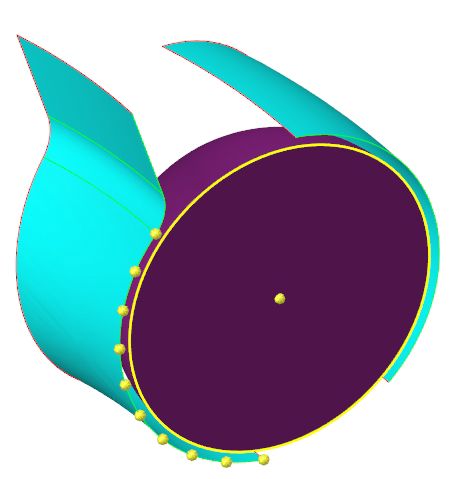
Step 3. 創建彈簧所在位置的線,在geom > lines面板里的工具從邊上的點沿著中心點方向拉伸。
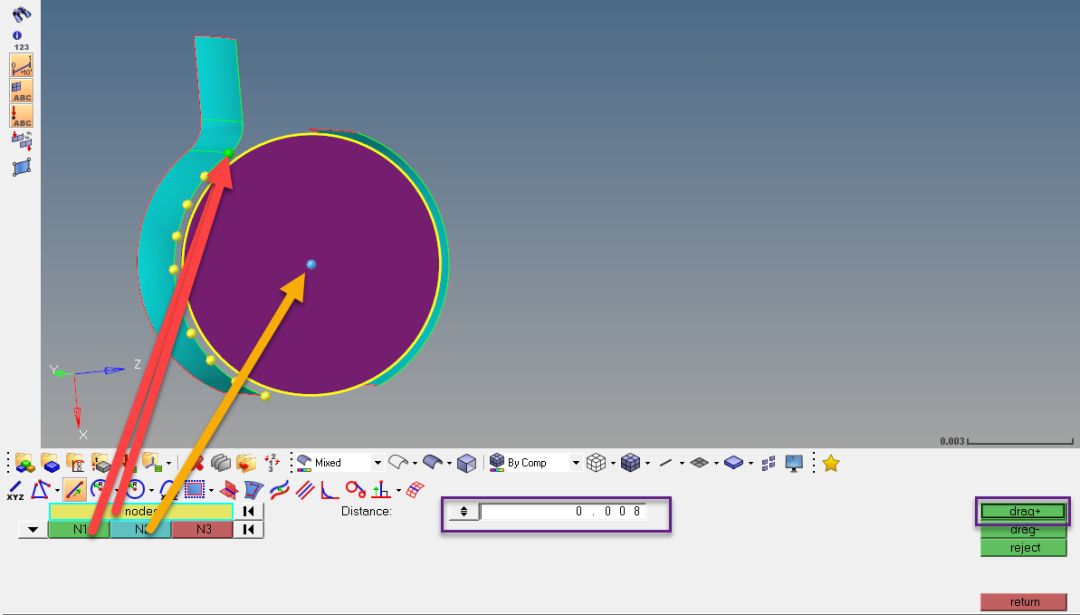
結果如下:

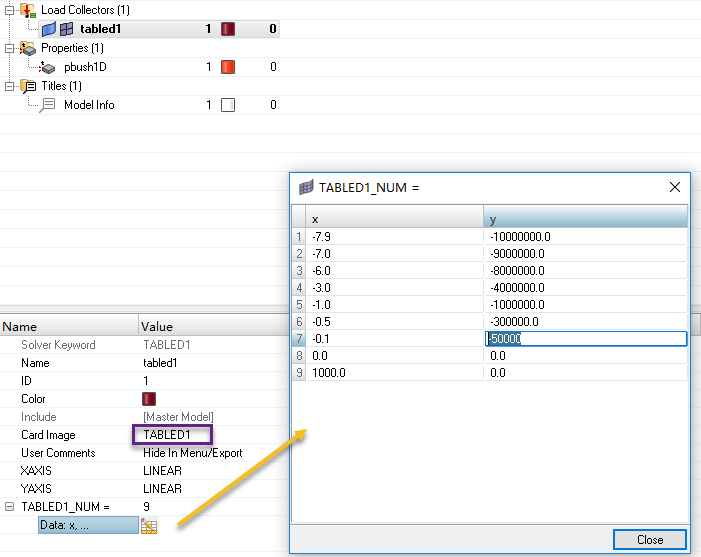
Step 4. 創建彈簧的位移-力曲線
Step 5. 創建pbush1D屬性
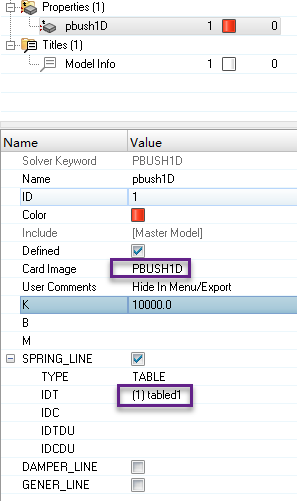
注意!
這里的K用于線性靜態分析/模態分析等線性工況(這時cbush1D會自動轉化為cbush)
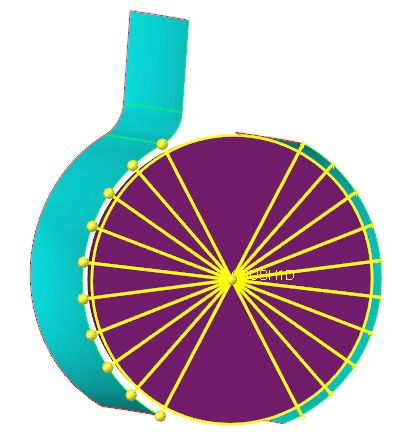
Step 6. 將spring單元類型為cbush1D

Step 7. 劃分單元,每條線一個單元

結果如下:
需要設置非線性迭代卡片,輸出卡片、工況等關鍵字才能起作用。這部分是求解器的內容了,有興趣的可以下載下面的例子進一步學習。
案例下載鏈接如下 ?
https://pan.baidu.com/s/1z_Cluj42Oy9xrLj6U4uzxg
RBE2單元
RBE2是剛性單元,在1D > rigids面板創建
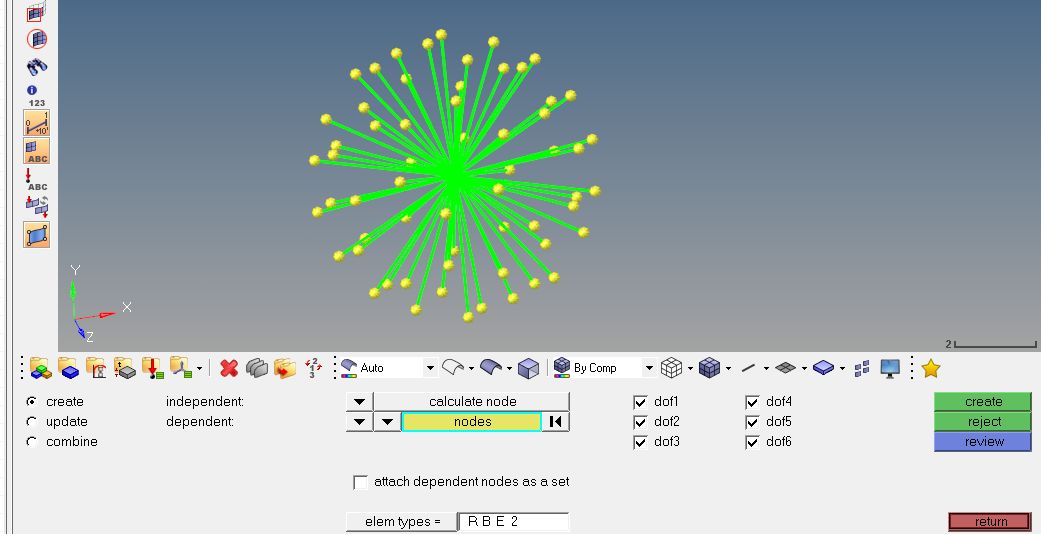
Calculate node也可以切換為選擇任意一個模型中的點(通常是不屬于任何網格的節點)
右側的6個自由度選項是控制從屬節點的自由度(獨立節點總是具有6個自由度)
RBE2常用于載荷加載和模型連接,也經常和其它單元組成復雜焊點
RBE3單元
RBE3是加權單元,加權的方式取決于各個從屬節點weight的值
RBE3在1D > rbe3面板創建

RBE2轉換為RBE3
使用1D > config edit面板

RBE3轉換為RBE2
使用1D > config edit面板

1D單元
1D單元有桿和梁兩大類
最簡單的1D單元是桿單元,桿對應于實際結構中的絎架,典型結構如下圖柳州白沙大橋的拉索
桿單元可以抗拉、抗壓、抗扭,但是不能抗彎,所以定義桿單元的時候需要提供材料、截面形狀。
在HyperMesh中創建桿單元的步驟如下
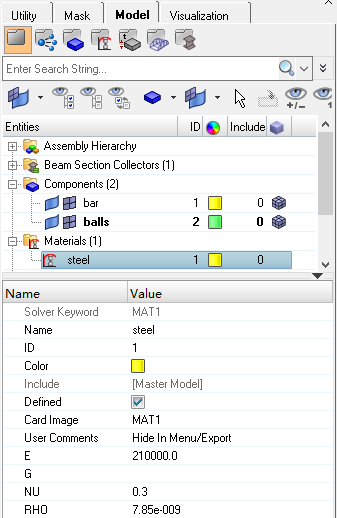
Step 1. 創建材料
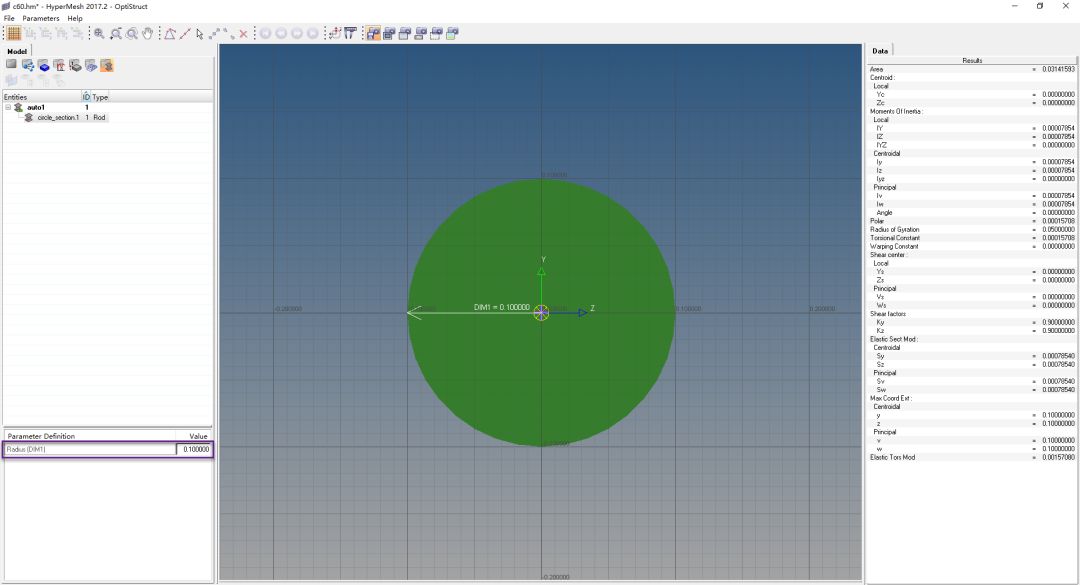
Step 2. 創建截面
Step 3. 創建屬性
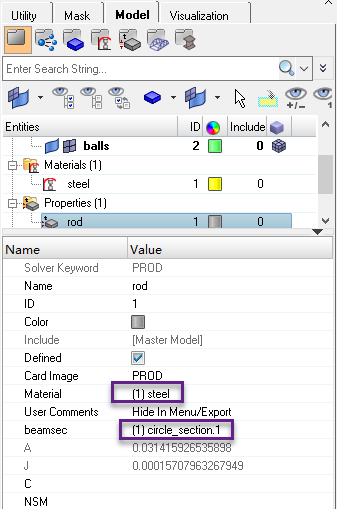
Step 4. 將屬性賦給component
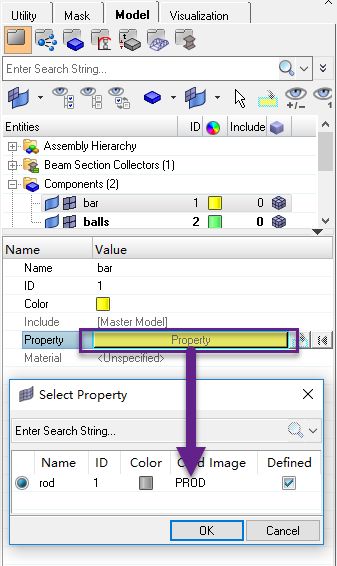
Step 5. 在面板區1D > rods面板創建桿單元
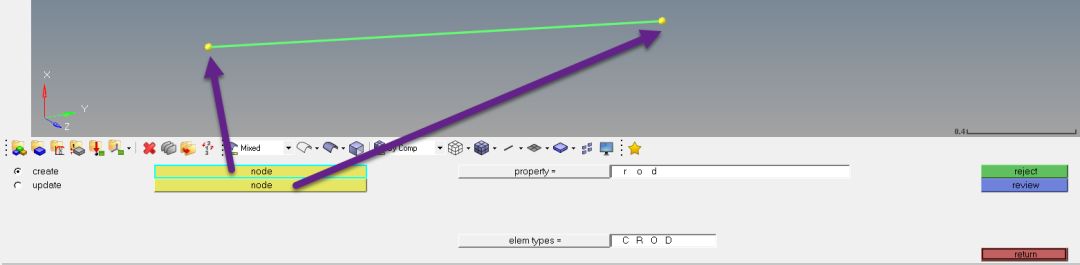
這樣就創建了一個桿單元
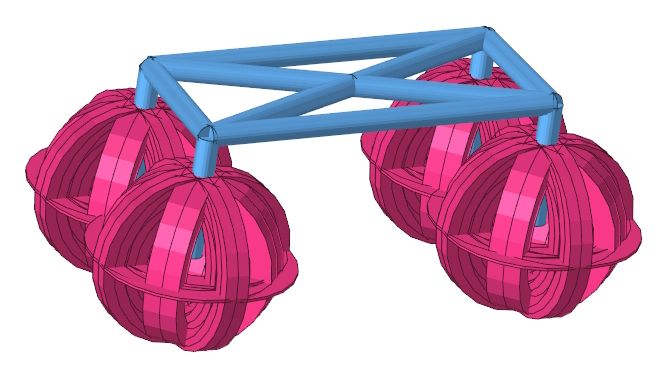
接下來做一個有趣的例子。
你只需要下載并運行如下腳本就可以得到一個C60(足球)的桿模型
C60運行腳本下載鏈接如下 ?
https://pan.baidu.com/s/1VH8ybUgwFeTOOHUlj6VqiA
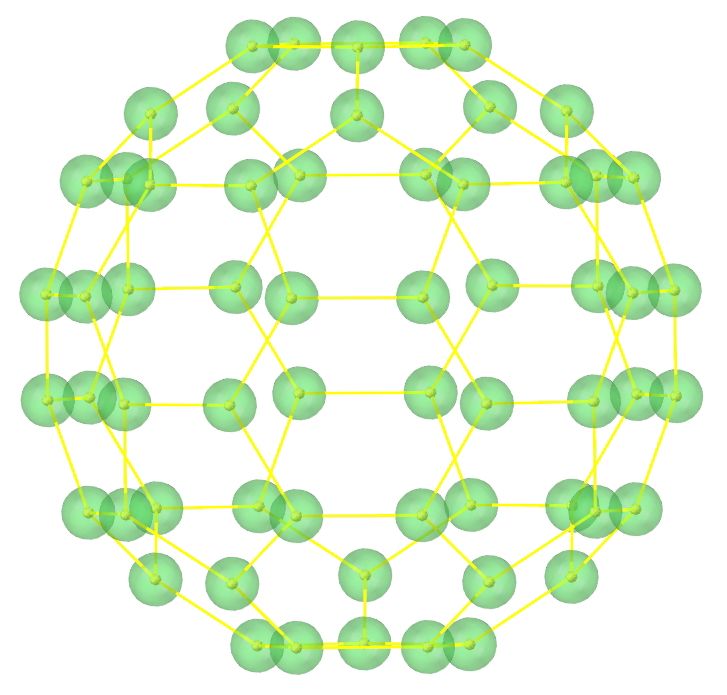
模型中綠色的球是只是為了顯示目的
除了crod,桿單元還有一些變種,比如:
1. 自帶截面的ctube管單元
2. 兩頭自帶連接功能的cweld焊點單元等
Cweld是一種強大的單元,可以連接:
單元-單元
點-單元
點-點
如果焊點直徑超過單個被連接單元的尺寸,還可以指定一片單元與另一片單元的連接。
Cweld單元通常都是批量創建,放在后面介紹焊點模塊的時候再介紹具體操作。
其它更復雜的無法用桿單元簡化的情況則需要使用梁單元,梁單元在土木工程、重型機械、航空、船舶等行業被大量使用,比如鳥巢的鋼結構需要使用梁單元進行模擬,梁單元的內容將在下一期進行介紹。

前處理:
六面體網格劃分

焊縫殼單元























工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




