越野車在沙漠中行駛怎么仿真?看看這個神仿真方案
通過性能也稱為越野性能,是車輛重要的性能之一,指在一定車載質量下,車輛能以足夠高的平均車速通過各種壞路及無路地帶和克服各種障礙的能力。其中的壞路或無路地帶指松軟土壤、沙漠、礫石、雪地等松軟地面及坎坷不平地段;各種障礙是指陡坡、側坡、壕溝等。
根據車輛理論,許多因素都影響著車輛的通過性。概括起來主要有:動力來源方面,即發動機性能的好壞及驅動方式;車輛構造方面,包括驅動橋形式、車架形式;外形方面,如整車的流線型以及整體布局;與輪胎有關方面,如輪胎構型、材料等。行駛在地面上的車輛,輪胎是其與地面之間唯一的接觸部件,除空氣動力的作用和重力外,所有來自地面的作用力和力矩都由輪胎來傳遞或承擔。
因此,探究地面—輪胎—整車相互作用,建立更接近地面—輪胎—整車系統實際工作狀況的模型是研究探尋車輛通過性和牽引特性的有效途徑,而這也是地面車輛力學中的重要內容。

圖1 越野車輛
本方案基于離散元仿真,結合車輛仿真標準方法—多體動力學方法,形成顆粒力學-多體動力學耦合仿真平臺,在保證從細觀角度考察地面土壤的動態行為及輪胎與地面土壤接觸受力同時,能夠充分考察車輛的轉向性能、越障性能、牽引性能、行駛平順性、操縱穩定性等,為設計軍用/民用越野車輛、軍用裝甲車輛、農業機械、礦山機械及深空探測車輛等提供指導,對國防建設和國民經濟發展都具有重大意義。
解決方案
1、離散元方法
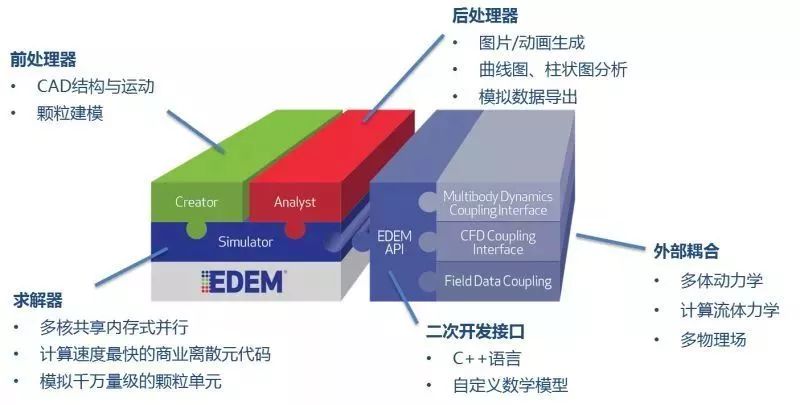
圖2 EDEM結構框架及功能
由眾多試驗和理論表明,地面條件是影響車輛行駛性能的主要因素之一,因此研究輪壤關系首先需要建立正確的土壤物理模型以及力學本構。土壤的主要物理特性主要包括:土粒大小、顆粒級配、密度、含水量、孔隙率等;土壤的力學特性主要包含兩部分:抗剪強度和彈性變形。
EDEM軟件為用戶提供了專用的土壤模型案例包,該案例包中包含了8種適用于土壤仿真的力學模型,充分考慮了土壤的物理特性和力學特性,這包括3種同時考慮土壤彈塑性變形和含水量的不同參數的EEPA接觸、2種考慮塑性變形的Hysteristic Spring模型、2種考慮土壤粘性的JKR模型以及1中不考慮粘性和可壓縮性的Hertz Mindlin模型,用戶在使用時可按照引導選擇正確的力學模型。
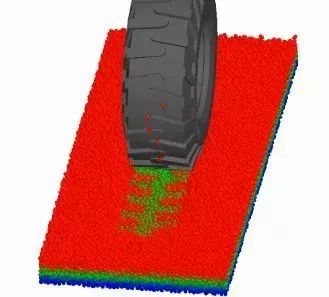
圖3 考慮土壤粘性和可壓縮性的EEPA接觸模型仿真
2、多體動力學方法
虛擬樣機技術是當前設計制造領域的一門新技術,它利用軟件建立機械系統的三維實體模型和力學模型,在各種虛擬環境中真實地模擬系統的運動,分析和評估系統的性能。
多體系統動力學是虛擬樣機技術的核心理論,包括多剛體系統動力學和多柔體系統動力學,是研究多體系統運動規律的學科。多體系統一般由若干個柔性和剛性物體相互連接所組成,其結構和連接方式多種多樣,因而動力學方程式一般都是高階非線性方程,特別是多柔體系統的動力學方程是強耦合、強非線性方程,只能通過計算機用數值方法進行求解。
車輛是一個復雜的多體系統,外界載荷的作用更加復雜多變,“人-車-路”三位一體的相互作用使車輛動力學模型的建立、分析、求解始終是一個難題。
多體動力學的迅速發展為車輛動力學的研究提供了一個方便快捷的手段。由此,車輛動力學研究的力學模型逐漸由線性模型發展到非線性系統模型;模型的自由度由二自由度發展到數十個自由度,甚至到數百個上千個自由度。模擬計算也由穩態響應特性的計算發展到瞬態響應特性和轉彎制動特性的計算。
目前多體動力學仿真已日漸成為國內外的各主要車輛和研究機構的通用方法和標準。目前在車輛領域廣泛應用的多體動力學仿真軟件有多種,包括MSC.ADAMS、Recurdyn、西門子公司的Virtual Lab Motion等。

圖4 ADAMS中車輛仿真
3、DEM-MBD耦合
EDEM軟件均可以實現與MSC.ADAMS、Recurdyn、Virtual Lab Motion等的耦合仿真。通用耦合流程如下圖所示:
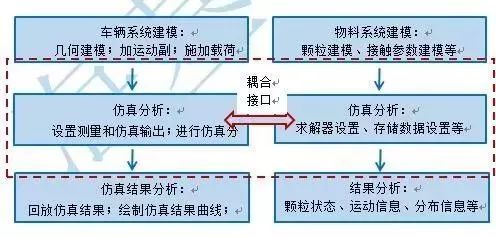
圖5 DEM-MBD耦合流程示意圖
以EDEM-ADAMS耦合為例,依托于海基自主研發的耦合接口EALink,EDEM可實現和ADAMS的單雙向耦合。
單向耦合:每一個時間步內,ADAMS將指定部件三個方向的平動值和轉動值(具體指X,Y,Z方向的線位移與線速度、X,Y,Z方向的角位移與角速度)傳遞給EDEM中對應的幾何體,EDEM中幾何體依據得到的位移與速度數據運動。
雙向耦合:每一個時間步內,ADAMS將指定部件三個方向的平動值和轉動值傳遞給EDEM中對應的幾何體,幾何體的位置變動導致顆粒受力的位置大小方向不同;接著,EDEM計算出此時顆粒對幾何體的作用力與作用力矩,并將作用力與力矩數據傳遞回ADAMS中,那么在下一個時間步起始,ADAMS將根據新的載荷信息和自身驅動聯合計算出部件新的位移、速度信息,循環交互傳遞數據,完成雙向耦合計算,雙向耦合計算流程如圖所示。
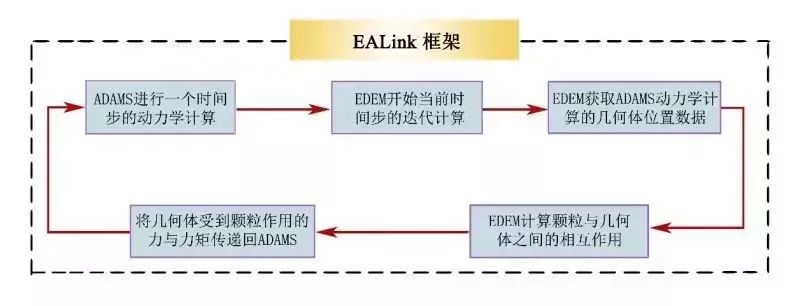
圖6EDEM-ADAMS耦合原理示意圖

圖7 EDEM-ADAMS耦合
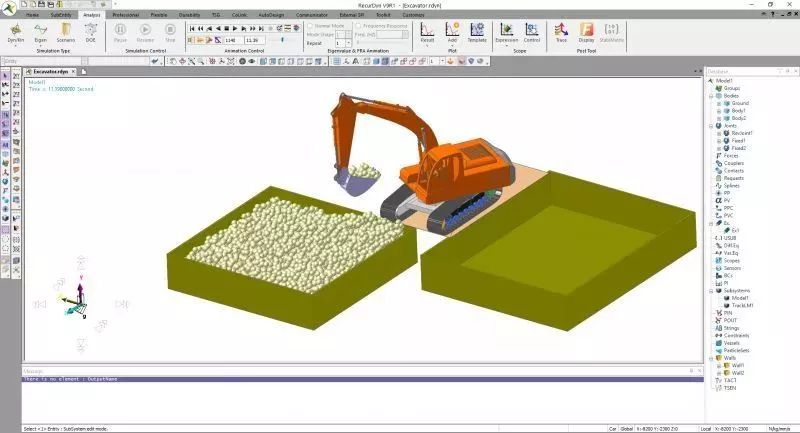
圖8 EDEM-Recurdyn耦合
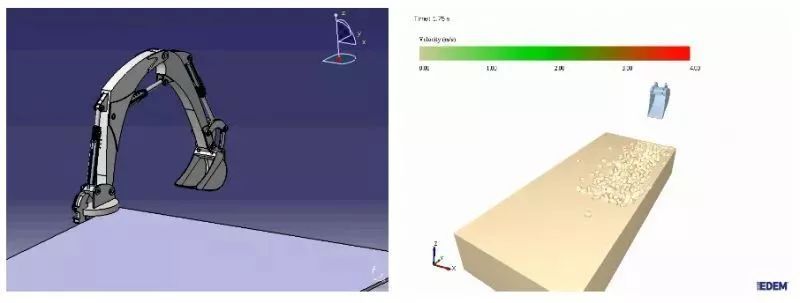
圖9 EDEM-Virtual Lab Motion耦合
應用案例
1、坦克轉向性能研究
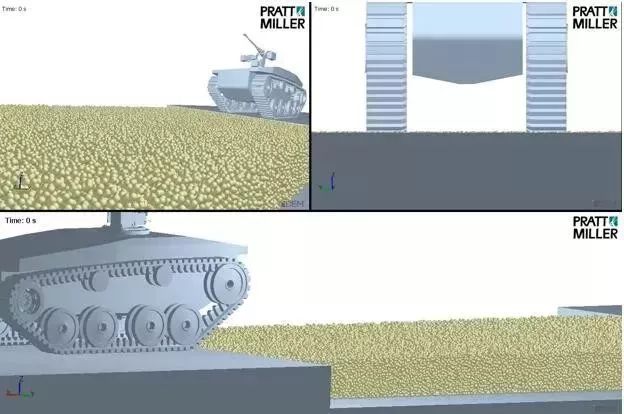
圖10 坦克及地面模型
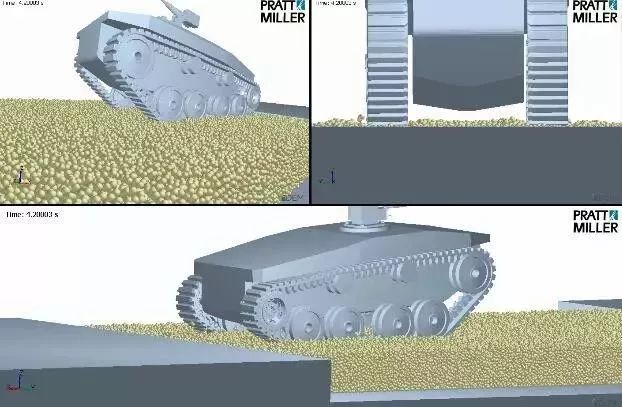
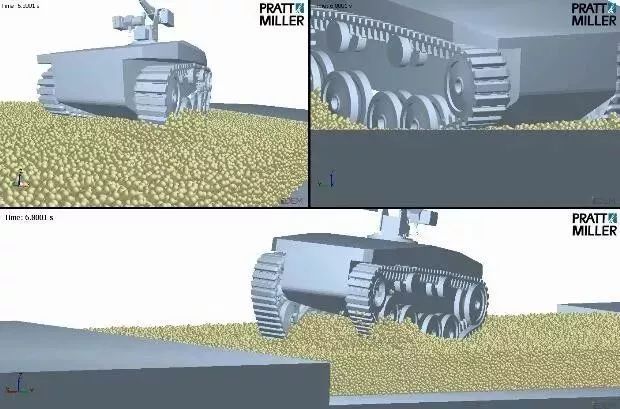
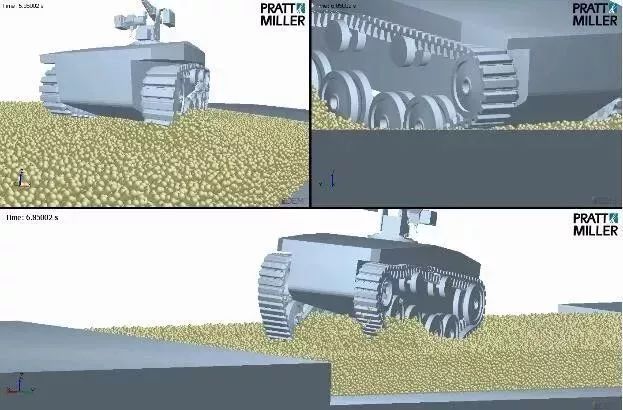
圖11 不同時刻坦克運動
2、悍馬越野車性能研究
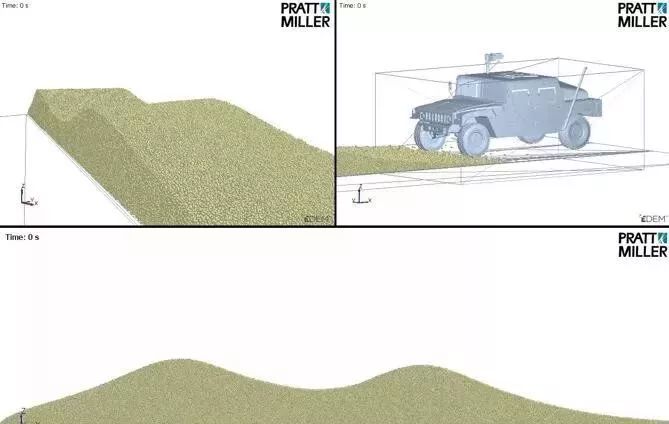
圖12 越野車及路面模型
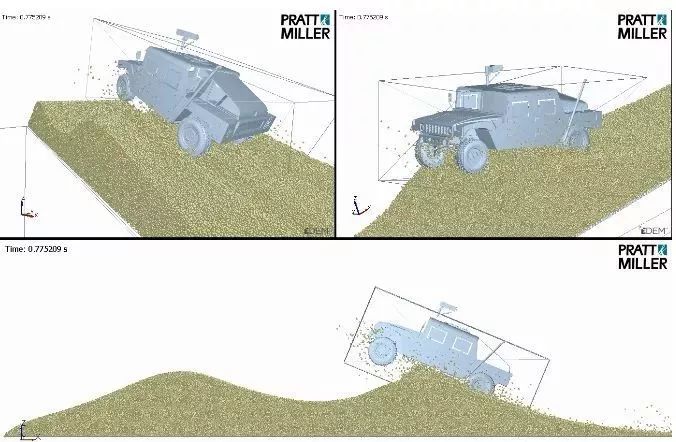
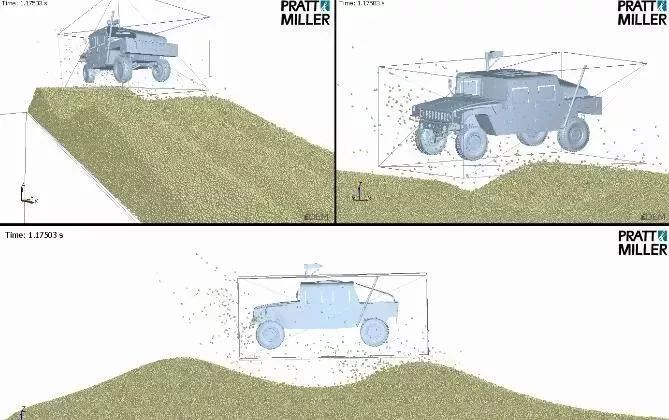
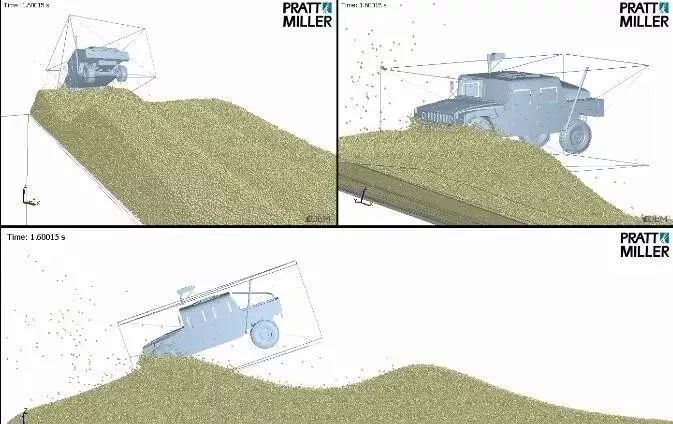
圖13 越野車不同時刻運動情況
3、轎車側翻過程中安全性能仿真


圖14 車輛側翻實驗不同時刻照片
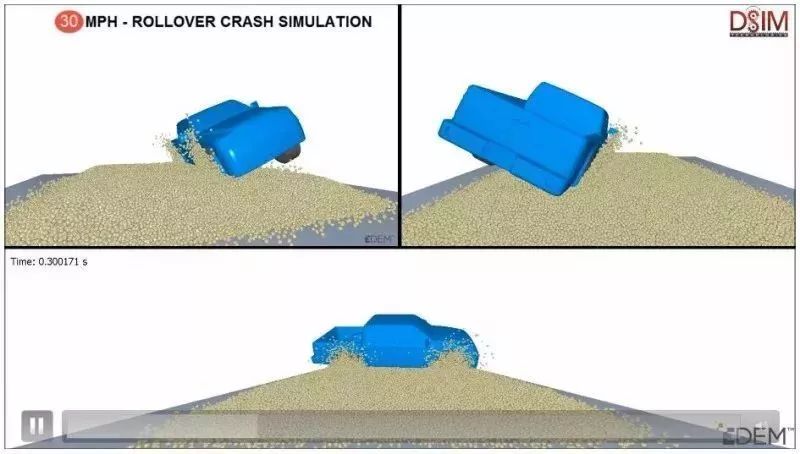
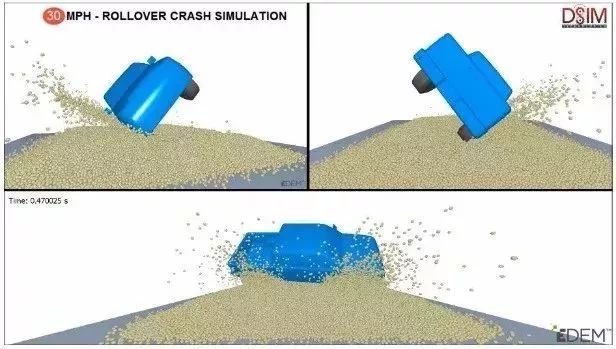
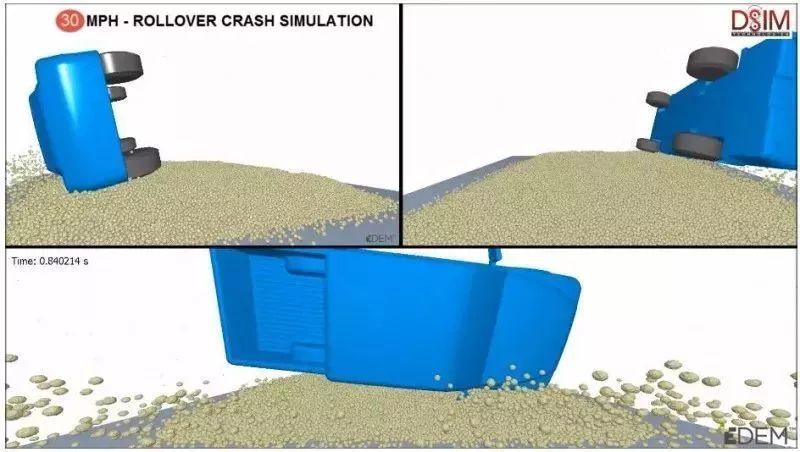
圖15 車輛側翻仿真-不同時刻側翻
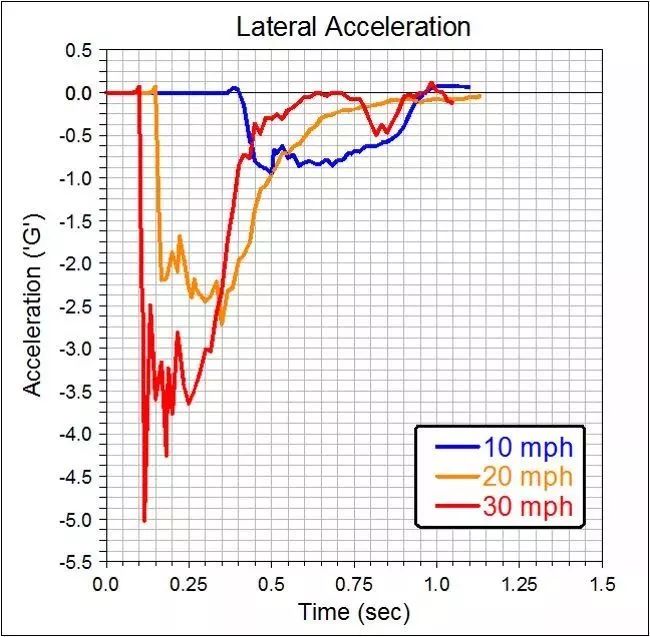
圖16 不同側向速度下汽車側翻的角速度





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




