分布式驅(qū)動電動汽車動力學(xué)控制
本文英文版于2017年12月22日發(fā)表在《Science》雜志專刊《Reimagining new energy vehicles:Research innovations at Tongji University》
http://www.sciencemag.org/collections/reimagining-new-energy-vehicles-research-innovations-tongji-university
電動化已經(jīng)成為汽車發(fā)展的必然趨勢。為了更好地實(shí)現(xiàn)電動汽車高效節(jié)能與主動安全的目標(biāo),車輛行駛動力學(xué)控制裝置一直是汽車工業(yè)研發(fā)的焦點(diǎn)。基于輪邊或輪轂電機(jī)的分布式驅(qū)動電動汽車(圖1)具有可控性好、傳動鏈短、結(jié)構(gòu)緊湊、車內(nèi)空間利用率高等優(yōu)點(diǎn)。
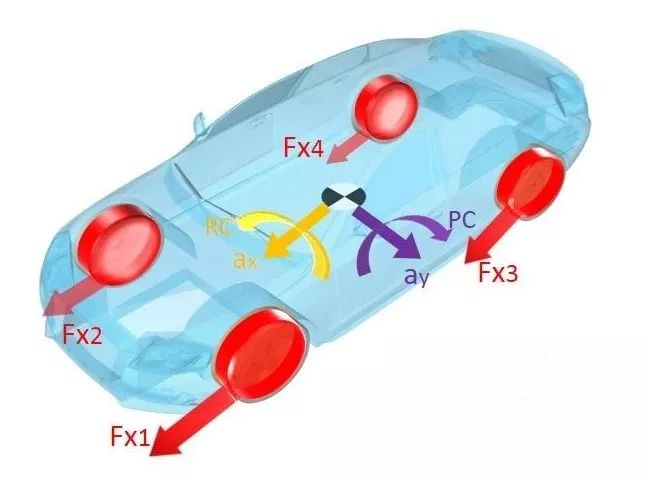
圖1分布式驅(qū)動電動汽車構(gòu)型
與傳統(tǒng)內(nèi)燃機(jī)車輛相比,分布式驅(qū)動電動汽車取消了變速器、差速器等復(fù)雜的傳統(tǒng)系統(tǒng),傳動效率更高;而且各個(gè)車輪的驅(qū)動電機(jī)均能獨(dú)立控制,通過電機(jī)轉(zhuǎn)矩的合理分配,充分利用電機(jī)高效區(qū)間,并結(jié)合回饋制動策略,能夠提高車輛的經(jīng)濟(jì)性。分布式驅(qū)動電動汽車可以在電機(jī)能力范圍內(nèi)精確、快速地實(shí)現(xiàn)單個(gè)車輪驅(qū)制動力矩控制和軸間、輪間轉(zhuǎn)矩分配控制,便于實(shí)現(xiàn)先進(jìn)動力學(xué)控制功能:通過單個(gè)車輪驅(qū)動力和制動力的獨(dú)立控制可以實(shí)現(xiàn)制動防抱死(Antilock Brake System,ABS)、驅(qū)動防滑(Acceleration Slip Regulation,ASR)功能,通過直接橫擺力矩控制實(shí)現(xiàn)操縱性改善控制(Handling Improvement Controller,HIC)、電子穩(wěn)定性控制功能(Electronic Stability Controller,ESC),提高車輛主動安全性能;同時(shí)結(jié)合電機(jī)轉(zhuǎn)矩信息獲得路面附著系數(shù)等環(huán)境參數(shù)以及質(zhì)量、車速等車輛關(guān)鍵參數(shù)和狀態(tài)信息,改善車輛動力學(xué)性能;獨(dú)立驅(qū)/制動過程中懸架產(chǎn)生的垂向反作用力可以影響車身的姿態(tài)角(俯仰、側(cè)傾),改善車輛的平順性。
驅(qū)動防滑與制動防抱死控制
根據(jù)輪胎動力學(xué)特性,當(dāng)車輪快速滑轉(zhuǎn)和抱死時(shí),輪胎附著能力嚴(yán)重惡化,車輪和車輛有失穩(wěn)危險(xiǎn)。驅(qū)動防滑與制動防抱死的控制目標(biāo)就是防止車輪的滑轉(zhuǎn)或抱死。為了提高車輛在復(fù)雜行駛條件下的驅(qū)制動能力,ASR和ABS算法需對輪胎非線性特性、建模不確定性以及路面附著條件變化具有良好的魯棒性和自適應(yīng)性。分布式驅(qū)動電動汽車電機(jī)的轉(zhuǎn)矩準(zhǔn)確可控、響應(yīng)迅速,可以減小控制算法收斂時(shí)間;電機(jī)既是執(zhí)行單元又是車輪轉(zhuǎn)矩和轉(zhuǎn)速的信息單元,便于實(shí)現(xiàn)車輪滑移率和輪胎-路面附著系數(shù)估計(jì),提高算法自適應(yīng)性。
傳統(tǒng)的ASR和ABS控制多采用門限值控制或PID控制。其中,邏輯門限值控制不涉及被控系統(tǒng)的具體數(shù)學(xué)模型,門限值需通過反復(fù)試驗(yàn)標(biāo)定;PID控制多以車輪滑移率為控制變量,針對確定的控制對象模型設(shè)計(jì)PID控制參數(shù),可以在一定工況下實(shí)現(xiàn)較好的控制效果。模型跟蹤控制根據(jù)電機(jī)力矩和輪速就能實(shí)現(xiàn)對車輪的控制,不需要對路面附著系數(shù)的辨識以及車速信息的估算。模糊邏輯控制不需要被控制對象的精確數(shù)模,對于輪胎與路面之間附著特性的非線性及路面的變化都有較強(qiáng)的魯棒性。全輪驅(qū)動的分布式驅(qū)動電動汽車為驅(qū)動防滑與制動防抱死控制提供了更迅速更精確的執(zhí)行器,由于缺少從動輪提供車速信息,且各驅(qū)動輪的狀態(tài)不一致,因此,對狀態(tài)估計(jì)精度和控制算法魯棒性要求也進(jìn)一步提高。結(jié)合輪胎-路面附著系數(shù)估計(jì)算法和車速估計(jì)算法,智能汽車研究所設(shè)計(jì)了滑模變結(jié)構(gòu)魯棒自適應(yīng)滑移率控制算法(圖2),算法對輪胎非線性和路面附著情況變化具有自適應(yīng)性;通過設(shè)計(jì)滑模面和到達(dá)條件使控制變量迅速收斂,對模型不確定性具有魯棒性,同時(shí)削弱了滑模面附近的抖振[1]。
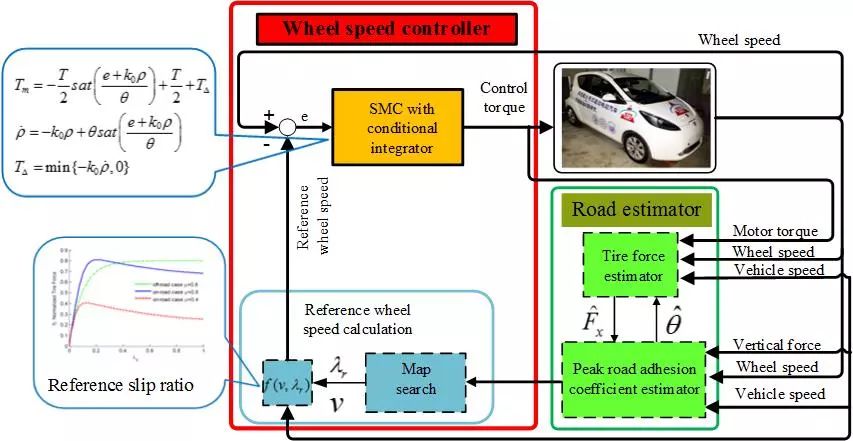
圖2 滑移率控制系統(tǒng)架構(gòu)
操縱穩(wěn)定性控制
轉(zhuǎn)向極限工況下,輪胎縱側(cè)耦合和懸架的非線性特性為車輛動力學(xué)控制帶來了挑戰(zhàn),在車輛、道路參數(shù)時(shí)變的情況下,準(zhǔn)確估計(jì)車輛質(zhì)心側(cè)偏角和路面峰值附著系數(shù),滿足駕駛員橫擺意圖并穩(wěn)定質(zhì)心側(cè)偏角的多執(zhí)行器分配控制是研究難點(diǎn)和熱點(diǎn)。分布式驅(qū)動電動汽車可以獨(dú)立、精確地控制各個(gè)電機(jī)的驅(qū)/制動力矩,為車輛實(shí)現(xiàn)操縱穩(wěn)定性控制提供硬件基礎(chǔ)。現(xiàn)有的分布式驅(qū)動電動汽車轉(zhuǎn)矩矢量控制普遍采用分層控制結(jié)構(gòu),上層為運(yùn)動跟蹤層,采用基于參考模型跟蹤的控制算法,根據(jù)駕駛員的輸入、車輛當(dāng)前狀態(tài)、參考模型等信息,計(jì)算所需要的廣義控制力;下層為轉(zhuǎn)矩分配控制層,將廣義控制輸入分配到各個(gè)車輪上,以實(shí)現(xiàn)對車輛運(yùn)動的控制。
運(yùn)動跟蹤控制
分布式驅(qū)動電動汽車可以精確的控制分配到每個(gè)車輪的驅(qū)/制動轉(zhuǎn)矩,在完成橫擺運(yùn)動控制同時(shí)可以保證駕駛員的加速意圖,因此現(xiàn)有分布式驅(qū)動電動汽車運(yùn)動跟蹤控制都不存在傳統(tǒng)ESC控制的死區(qū),而是持續(xù)的控制車輛跟蹤參考模型響應(yīng)。最常見的運(yùn)動跟蹤控制算法結(jié)構(gòu)為前饋+反饋,這類結(jié)構(gòu)多配合直接橫擺控制(Direct Yaw Control,DYC)參考模型,前饋控制橫擺力矩控制車輛的穩(wěn)態(tài)質(zhì)心側(cè)偏角為零,反饋控制橫擺力矩負(fù)責(zé)消除橫擺角速度跟蹤誤差,前饋與反饋橫擺力矩之和為總的控制力矩。由于質(zhì)心側(cè)偏角無法通過量產(chǎn)傳感器直接測量,因此,需要通過估計(jì)算法獲取質(zhì)心側(cè)偏角。
由于有人駕駛車輛方向盤轉(zhuǎn)角由駕駛員控制,因此只通過DYC無法同時(shí)跟蹤橫擺角速度和質(zhì)心側(cè)偏角兩個(gè)狀態(tài)變量;現(xiàn)有的同時(shí)跟蹤二者的控制算法實(shí)際上是通過質(zhì)心側(cè)偏角誤差修正橫擺角速度誤差,實(shí)現(xiàn)橫擺角速度跟蹤;若要同時(shí)跟蹤上述兩個(gè)狀態(tài),需采用主動轉(zhuǎn)向控制、四輪轉(zhuǎn)向控制或轉(zhuǎn)向系統(tǒng)與分布式驅(qū)/制動系統(tǒng)集成控制。
運(yùn)動跟蹤控制中,傳統(tǒng)的PID控制算法較為簡單,可靠性高,適用于建立精確數(shù)學(xué)模型的線性定常系統(tǒng),該控制器設(shè)計(jì)的關(guān)鍵是控制器參數(shù)的選取。但由于車輛系統(tǒng)存在明顯的非線性以及參數(shù)不確定性,屬于非線性時(shí)變系統(tǒng),PID控制器在不同工況下的控制結(jié)果可能出現(xiàn)明顯差異。
智能汽車研究所利用線性最優(yōu)二次型最優(yōu)調(diào)節(jié)器(LQR)實(shí)現(xiàn)反饋控制(圖3),設(shè)定目標(biāo)函數(shù)(控制能量、控制誤差等),根據(jù)最優(yōu)控制原理計(jì)算得到反饋控制力矩[2]。另外,考慮到車輛響應(yīng)延遲導(dǎo)致的控制介入延遲問題,控制器對駕駛員轉(zhuǎn)向意圖進(jìn)行預(yù)測,提高了車輛穩(wěn)定性;并且設(shè)計(jì)了基于側(cè)偏剛度辨識的自適應(yīng)算法,利用在線辨識的側(cè)偏剛度實(shí)時(shí)修正線性二次型最優(yōu)調(diào)節(jié)器的反饋系數(shù),有效改善了控制算法對側(cè)偏剛度變化的適應(yīng)性[3]。此外,為了將DYC推廣到常規(guī)工況,減小控制介入感,我們使用ITAE優(yōu)化上升時(shí)間、超調(diào)量,通過橫擺角速度反饋或橫擺角速度與質(zhì)心側(cè)偏角反饋來實(shí)現(xiàn)橫擺力矩計(jì)算,提高車輛操縱性能[4]。
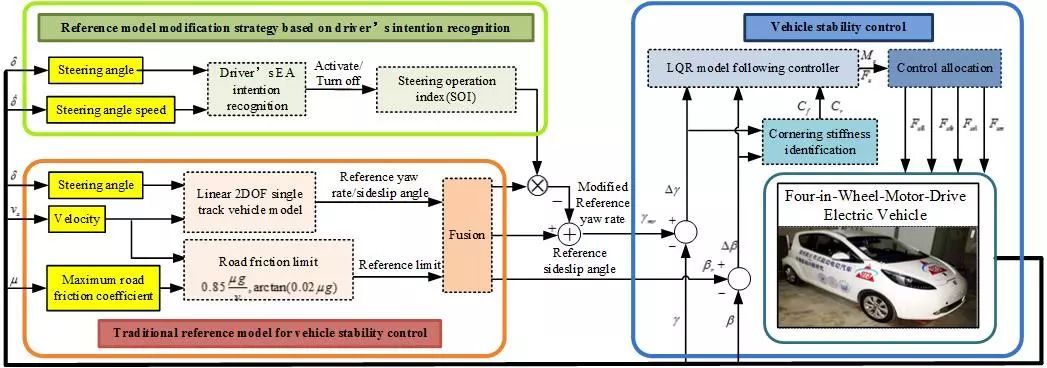
圖3 分布式驅(qū)動穩(wěn)定性控制系統(tǒng)架構(gòu)
轉(zhuǎn)矩分配控制
轉(zhuǎn)矩分配控制的過程就是建立從廣義力到各個(gè)車輪轉(zhuǎn)矩的映射。由于分布式驅(qū)動系統(tǒng)擁有冗余執(zhí)行器,執(zhí)行器數(shù)量大于廣義力維數(shù),因此多采用優(yōu)化分配算法以保證分配算法有解。在優(yōu)化分配算法中,廣義逆法是應(yīng)用得比較廣泛的算法。部分文獻(xiàn)以電機(jī)消耗能量最少為優(yōu)化目標(biāo),利用重新分配廣義逆算法設(shè)計(jì)了轉(zhuǎn)矩分配策略。而在電機(jī)轉(zhuǎn)速確定的情況下,可以將電機(jī)效率擬合為轉(zhuǎn)矩分配系數(shù)的凸函數(shù),然后通過最優(yōu)化算法求解四個(gè)電機(jī)轉(zhuǎn)矩使電機(jī)效率最優(yōu)。
有文獻(xiàn)采用二次規(guī)劃法從而實(shí)現(xiàn)轉(zhuǎn)矩優(yōu)化分配,該算法可以靈活利用代價(jià)函數(shù)和約束條件,對某些控制量進(jìn)行加權(quán)或者懲罰,從而迫使系統(tǒng)遵循其他特定的約束條件,解決復(fù)雜控制分配問題。當(dāng)執(zhí)行機(jī)構(gòu)出現(xiàn)故障或失效時(shí),二次規(guī)劃方法可以同時(shí)更新控制效率矩陣以及等式和不等式約束,使系統(tǒng)重構(gòu)。課題組以輪胎利用率為優(yōu)化目標(biāo),能夠最大限度地保證車輛穩(wěn)定性裕度;將分配誤差和輪胎利用率等優(yōu)化目標(biāo)整合為加權(quán)最小二乘問題,提高求解效率;并考慮大側(cè)偏工況輪胎縱/側(cè)向力耦合特性,設(shè)計(jì)了動態(tài)效率矩陣,提高了轉(zhuǎn)矩分配精度[3,5]。
集成控制
傳統(tǒng)的獨(dú)立設(shè)計(jì)的控制器有各自明確的控制目標(biāo)。但是各系統(tǒng)間存在一定程度上的功能重疊和干擾,因此,多個(gè)執(zhí)行系統(tǒng)的動作分配和多個(gè)控制目標(biāo)的協(xié)調(diào)便是系統(tǒng)集成控制策略的關(guān)鍵。
為了解決復(fù)雜行駛工況下分布式驅(qū)動電動汽車多目標(biāo)協(xié)調(diào)、冗余執(zhí)行器分配問題,全面提升車輛經(jīng)濟(jì)性和主動安全性,智能汽車研究所提出了一體化動力學(xué)控制系統(tǒng)(圖4)。通過傳感器和參數(shù)估計(jì)系統(tǒng)獲取車輛參數(shù)和狀態(tài),結(jié)合整車管理系統(tǒng)和橫擺角速度-質(zhì)心側(cè)偏角聯(lián)合穩(wěn)定性判據(jù)仲裁車輛模式,將多目標(biāo)協(xié)調(diào)問題化為子系統(tǒng)優(yōu)先級問題和多目標(biāo)分配問題,通過設(shè)計(jì)各子系統(tǒng)介入和退出條件,實(shí)現(xiàn)控制目標(biāo),避免子系統(tǒng)干擾;將多目標(biāo)分配問題化為帶約束的加權(quán)最小二乘問題,設(shè)計(jì)廣義力跟蹤誤差、輪胎利用率、電機(jī)能耗、差動助力轉(zhuǎn)向和輪胎滑移率等多個(gè)分配目標(biāo),根據(jù)行駛模式確定各目標(biāo)權(quán)重系數(shù)。通過參數(shù)估計(jì)系統(tǒng)和魯棒控制算法,實(shí)現(xiàn)控制系統(tǒng)對于車輛系統(tǒng)非線性特性、參數(shù)和狀態(tài)變化以及行駛條件變化的自適應(yīng)性;同時(shí),對模型誤差和外界擾動具有魯棒性。
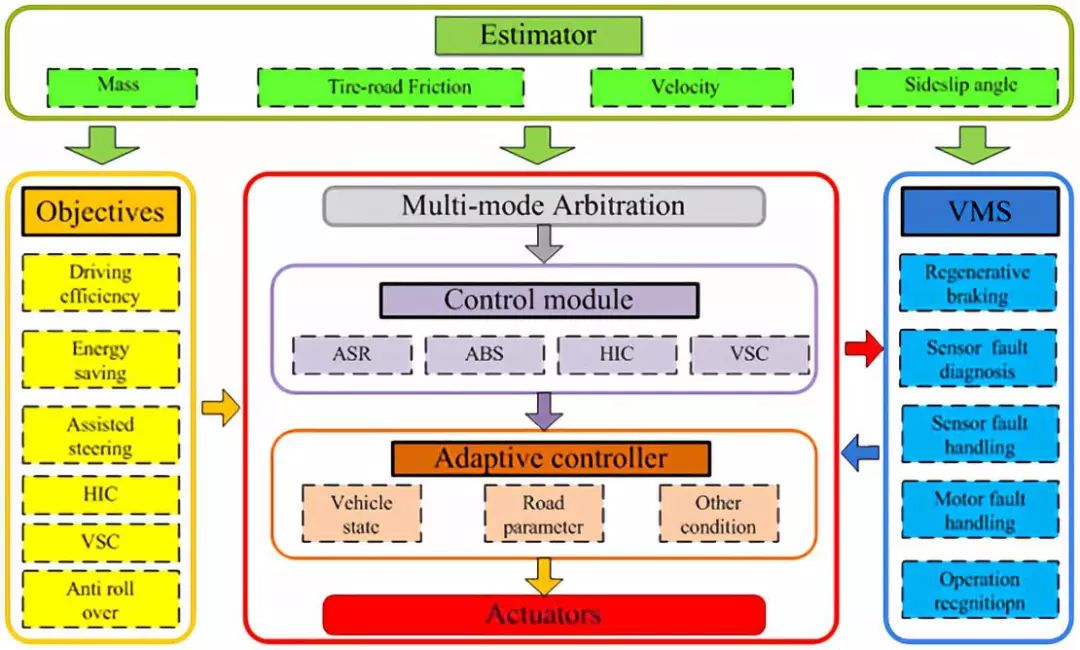
圖4 集成控制系統(tǒng)架構(gòu)
總結(jié)
1.分布式驅(qū)動電動汽車為車輛動力學(xué)控制提供了廣闊的研究空間,通過轉(zhuǎn)矩的優(yōu)化分配,可以改善車輛的經(jīng)濟(jì)性、操縱穩(wěn)定性、平順性。
2.為了提升控制系統(tǒng)對于車輛參數(shù)、狀態(tài)以及車輛行駛環(huán)境適應(yīng)性,需要設(shè)計(jì)滿足控制需求的狀態(tài)估計(jì)與參數(shù)辨識算法,同時(shí)保證控制-估計(jì)系統(tǒng)的穩(wěn)定性,而分布式驅(qū)動為車輛狀態(tài)估計(jì)算法提供了更大的可能。
3.為了保證分布式驅(qū)動電動汽車在復(fù)雜工況下的良好行駛性能,解決多控制目標(biāo)、多控制功能、多執(zhí)行器和多維運(yùn)動的協(xié)調(diào)問題,集成控制成為分布式驅(qū)動電動汽車動力學(xué)控制當(dāng)前的研究重點(diǎn)。
參考文獻(xiàn)
1. Yu, Z., Zhang, R., Lu, X., Jin, C., & Sun, K. (2017). Robust adaptive anti-slip regulation controller for a distributed-drive electric vehicle considering the driver’s intended driving torque. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, v 232, n 4, p 562-576, March 1, 2018
2. LuXiong, ZhuopingYu, YangWang, et al. Vehicle dynamics control of four in-wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J]. Vehicle System Dynamics, 2012, 50(6):831-846.
3. Xiong L, Teng G W, Yu Z P, et al. Novel stability control strategy for distributed drive electric vehicle based on driver operation intention[J]. International Journal of Automotive Technology, 2016, 17(4):651-663.
4. Zhuoping Y U, Bo L, Lu X, et al. Direct Yaw Moment Control for Distributed Drive Electric Vehicle Handling Performance Improvement[J]. Chinese Journal of Mechanical Engineering, 2016, 29(3):486-497.
5. Leng B, Xiong L, Yu Z, et al. Allocation control algorithms design and comparison based on distributed drive electric vehicles[J]. International Journal of Automotive Technology, 2018, 19(1):55-62.





















工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺客服
TOP




