一種人工重力空間飛行器的初步設計
作者:程瑞,中國空間技術研究院508所在讀碩士生
摘要:在人類過往歷史上的所有載人空間飛行器中,由于運載火箭能力、材料制造水平、任務目標以及制造成本等多方面因素制約,尚未能有模擬重力的載人空間飛行器出現。但是對于未來的長期深空載人探測乃至深空移民計劃,可實現模擬重力的空間飛行器設計又是具有很寬廣的前途和市場的。本為基于此提出了一種依靠自旋來實現模擬重力的空間飛行器初步設計方案,并對其發射組裝、姿態軌道調整、空間對接等基本航天器功能的實現方式和其自身工作原理、應急預案、內部空間分配等方案進行了一些探討。
關鍵詞:模擬重力 深空探測 空間飛行器
Abstract: Within all the manned space vehicles in human’s history, as the result of the limits of launch vehicle capability, material manufacturing standards, project aim and budgets, previously there does not exist any space vehicles with simulated gravity. However, there absolutely will be a broad market for space vehicles which are able to realize simulated gravity since there will be long-term manned deep space exploration and even space migration. Therefore, this paper gives a primary design proposal which is capable to realize simulated gravity and it’s based on spinning. And has done preliminary study of its basic functions of launching, assembling, attitude and orbit adjustment, space docking, interior functions, contingency plan and space attribution.
Keywords:simulated gravity; deep space exploration; space craft
1. 人工重力空間飛行器的研究背景
1.1 微重力的不良影響
在太空中所有的穩定運行的空間飛行器由于其沿橢圓或圓軌道的運動提供的離心力對于其環繞星體引力相抵,理論上應處于無重力狀態,但是由于殘余微 薄大氣和其它星體等的引力作用,在表觀上近似于有10?5~10?4??量級的重力。 美國航宇局的科學家對微重力環境下了一個比較科學的定義:微重力環境是指在重力的作用下,系統的表觀重量遠小于其實際重量的環境,而這即是宇航員在空間中所處的力學環境。
人類本身只是適應于地球表面的生活環境,對于空間環境在進化上是完全不適應的,微重力環境對于人類的生理心理都有著巨大的沖擊和影響,具體體現在:
在生理上,由于缺乏重力,航天員最先感覺到的就是身體是飄浮的。飛船艙內的東西,如果不用帶子固定,都要飄著。航天員要想行走,只能用雙手推拉艙壁來幫助身體移動。若是在艙外,則需要用特制的出艙活動裝置來幫助航天員 “走動”。在缺乏重力的情況下,人身體上所有與重力有關的感受器都發生了變化。四肢已感覺不到重量,人體感覺不到頭部的活動。這種異常的感覺使航天員造成定向錯覺,當用手推拉航天器艙壁時,感覺不到自己是前后運動,而是會認為航天器在前后運動,自己是靜止不動的。這種微重力環境會使航天員出現頭暈、目眩、惡心、困倦等癥狀,對體內器官會造成影響。航天員一旦進入微重力狀態,由于缺乏重力的向下吸引,全身體液會向上半身和頭部轉移,出現頸部靜脈鼓脹,臉變得虛胖,鼻腔和鼻竇充血,鼻子不通氣。而體液的轉移會使航天員出現血漿容積減少,血液濃縮,導致貧血。微重力環境對于人體的肌肉、骨骼也會逐漸的造成一定的缺損。
在心理上:由于無法如地面上一般躺在床上安穩地睡眠而只能依靠綁帶綁在較堅硬的板面上來防止睡眠時飄動并模擬地面睡眠方式,宇航員大多有較嚴重的睡眠問題[1]。并且由于其他的習慣性(不僅是心理上,也有長期種群自然選擇遺留下來的一些遺傳性的生理習慣性等)的日常動作如吃飯、喝水、盥洗、排泄等都會受到極其嚴重的影響。這些影響在短期空間任務下在心理上可能由于好奇或者是使命感等的存在不會顯現,但是對于半年以上乃至幾年的長期深空探測任務而言的影響是巨大的,很容易引起嚴重的心理問題,最終導致任務失敗。
1.2 國內外概念上的發展
國外對于人工重力空間飛行器的概念早有涉及,并且甚至提出了一些實踐計劃,但是由于各種各樣的原因,這些設想和計劃均夭折了。早在 1949 年發表于《英國行星學會雜志》的一篇文章中,H.E.羅斯設想了一個“燃料補給站”,用于執行月球探索任務。這一設計由 3 部分構成,可以形象地比喻為碗、小圓面包和手臂。“碗”是一面巨大的鏡子,在設計上用于聚集陽光,加熱水以產生蒸汽動力。沒錯,就是打造一座蒸汽動力的空間站。“小圓面包”這部分的外形更像是一張百吉餅,位于鏡子后面。“手臂”從“小圓面包” 一側伸出,連接對接端口。借助于太空中的旋轉輪,人造重力或者羅斯的更準確描述“假重力效應”會以這樣一種方式產生:推進器讓“碗”和“小圓面包”沿著它們的軸旋轉,產生向心力,進而產生重力。在中空的輪內的任何人都會感受到與重力類似的效應,就好像被拖向外部的曲殼,實際上是外殼的地板將他們往上推。具體產生多少人造重力取決于旋轉輪的尺寸和旋轉速度,尺寸越大,速度越快,產生的人造重力越大。

英國行星學會在 1971 年也撰寫了有關人造重力項目的報告。其中一份報告提到了麥克唐納-道格拉斯公司的所謂“太空基地”,由一系列圓柱形太空艙構成。這個基地建有一個獨立的人造重力艙段,為宇航員提供相當于地球重力一 半的人造重力。另一個與之相競爭的設計來自于北美羅克韋爾公司,更加雄心勃勃,采用中央芯設計,4 個圓柱形太空艙從中央芯伸出,好似輪輻一樣。每一個太空艙都建有生活區和工作區。
1.3 人工重力空間飛行器的意義
人工重力空間飛行器,是未來航天發展向深空化和大規模化的必經之路。人 工重力空間飛行器規模更大,更適合人類和動植物生存,從而對內在生物循環提供更多的支持,最終提高循環率、減少對外來補給的依賴程度。只有創造出了更適合人類生活居住的、更大空間的空間飛行器,人類才能夠真正的在空間中進行 長期生活和科研,并對遠至太陽系外的宇宙進行載人探索。
2. 總體方案布局設計
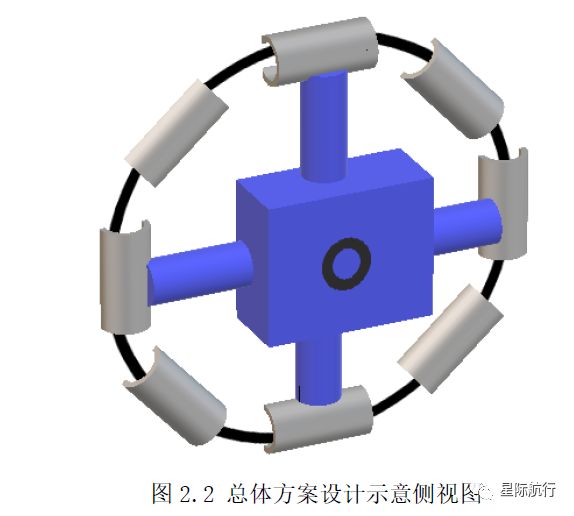
總體方案布局如圖 2.1 所示,其側視圖如圖 2.2 所示。主體主要由外圍的 8 個軌道艙、連接艙、核心艙以及相應的連接裝置組成。圖 2.1 中標號 1 為軌道 艙,2 號為軌道艙間的充氣柔性連接裝置,3 號為連接軌道艙與中心艙的連接艙, 4 號為核心艙及核心艙上的對接接口(核心艙形狀亦可為圓柱體裝),5 號為各軌道艙上的噴氣推進裝置。通過噴氣使得整體繞軸心旋轉產生人工重力或停下。
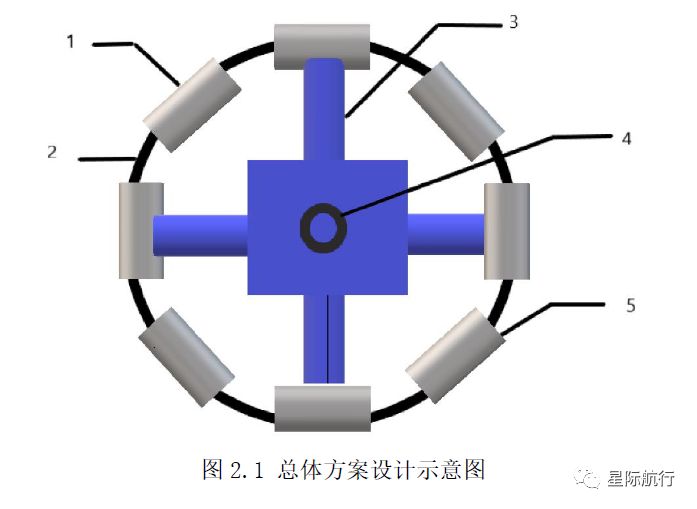
參考天宮二號全長 10.4 米,最大直徑 3.35 米,太陽翼展寬約 18.4 米,重 8.6 噸,由長征二號 F 火箭發射的尺寸數據以及長征五號火箭 5 米的直徑和 23 噸左右 LEO 軌道運載能力,設計軌道艙尺寸為最大直徑 5 米、全長 15 米、重 20 噸左右。則總體方案半徑約為 25 米,整體總質量約為 250 噸,略小于國際空間站(370 噸左右)。太陽能帆板安裝在連接艙兩側,同時軌道艙外側亦可安裝。
標號 1 的軌道艙分為兩類,其中四個與連接艙直接相連的為軌道艙Ⅰ類型,夾在軌道艙Ⅰ之間的為軌道艙Ⅱ類型。軌道艙Ⅰ多一個用于連接的艙門且其位置 固定、對結構受壓耐拉等能力更強,可直接承載載荷,因而作為須加速或減速旋 轉時的噴氣推進主體,同時其便捷性較好,因而可作為實驗或交流艙室之用較為優勢;軌道艙Ⅱ則結構相對較簡單、內部空間更大,作為物資儲藏或生活艙室更有優勢。同時軌道艙外側可連接較大面積的太陽能帆板來為飛行器提供電能。

標號 2 的充氣柔性連接裝置在軌道艙Ⅰ和軌道艙Ⅱ之間,其由兩層制成。外層有一定柔性冗余(便于空間對接組裝)的高強度復合材料(如凱夫拉纖維等)制成,可耐受大拉力和一定的空間微粒撞擊并維持飛行器總體結構穩定。內層則為充氣連接裝置,與當前已經過多次太空測試的充氣艙體結構相似,用于隔絕內部環境和空間環境。充氣柔性連接裝置所連接的兩側艙門處于常閉狀態,僅在通過時手動開啟。充氣柔性連接裝置優勢在于可以避免固定硬材料的連接方式由于尺寸裝配誤差導致的一環8個軌道艙無法完美連接的風險,并且可以避免熱脹冷縮使得局部應力過大而導致的結構問題。
標號 3 的連接艙主要須實現的結構功能為在總體開始或停止轉動時要承受大量的剪切力,尤其是在艙門接口處應力更為集中。由于在轉動中連接艙與軌道 艙的角速度相同但線速度不一樣,因而其所能提供給艙內的向心加速度更小,相對不適合長期工作生活,因而更多的用作貯存燃料、電池以及通信、遙感等無需人來參與的功能之用。連接艙兩側連接太陽能帆板。
標號 4 的核心艙是力學結構的主體,同時承擔外來對接任務,并且需推進變軌時也由安裝在其上的推進器來完成。核心艙一側是對接口,另一側則是返回艙。多個推進器對稱安裝在對接接口周圍,可推進總體加速或是改變姿態。
標號 5 的推進裝置由于須提供較大的沖量需要采用化學燃料燃燒推進的方式而非直接噴出壓縮氣體的方式,同時其噴口必須朝向外側以避免高溫燃氣對艙體產生的威脅。
3. 各分系統方案
3.1 發射和組裝方案
由于作為長期地球空間站、探月等的中繼站或者是深空探測站的任務目標不同,飛船總體所需攜帶的燃料差距十分大,選取的軌道也完全不同。須進行深空探測時,適宜于將飛船一次性送到更高的軌道,而作地球空間站則僅需低軌道(如國際空間站 ISS 僅在 400km 左右高度)。
在發射時先將核心艙送至預定軌道,確認工作無誤后再依次發射四個連接艙并與核心艙對接,再次發射軌道艙Ⅰ并與連接艙對接,最后再發射軌道艙Ⅱ并與軌道艙Ⅰ對接,一共是 13 次發射任務。中間若任何一次任務失敗可重新進行完全不影響既成部分的正常工作,而在整個發射任務完成前半組裝的各部分亦可在 軌先期作為普通空間站工作。
3.2 姿態軌道調整方案
總體飛行器的姿態控制和變軌調整完全依靠核心艙上的推進裝置,而推進裝 置能力大小則亦由任務目標而定。而飛行器的轉動則依靠軌道艙上的推進裝置來 實現或停止。由于整個空間飛行器質量很大(250 噸左右),均需由較大推力的化學燃料發動機推進。
同時由于總體的半徑約為 25 米,若轉動角頻率為 0.2rad/s,亦即約 16 秒/ 周的旋轉速度,該轉動頻率相對人體舒適性很高同時其在外環軌道艙上可產生的加速度為 1m/s,即地表重力的 1/10 左右,但是由于實質上人對運動的敏感多來自距離,而其同樣自由落體運動相同距離的物體所花的時間僅約為地表的 3.1 倍左右,已足夠為空間生活工作帶來翻天覆地的變化。
3.3 空間對接方案
空間對接方案可有兩種:旋轉對接或者靜止對接。
在飛行器完全建成前其對接方式為靜止對接方式,飛行器整體并不會轉動,對接方式與當前國際上已大量實踐過的普通對接完全一致。在飛行器進行旋轉之后再次進行對接時需要設計建造新的適應于在自身旋轉的條件下進行對接的對接補給艙。來參與對接的對接補給艙在對接前須將自身與飛行器同速率同方向旋轉,這對對接技術提出了新的挑戰;同時若面對無法自身旋轉的對接補給艙時飛行器須在對接前逆向噴氣使其恢復靜止狀態。
3.4 內部布局方案
軌道艙Ⅰ作為實驗或交流艙室之用較為優勢;軌道艙Ⅱ則結構相對較簡單、內部空間更大,作為物資儲藏或生活艙室更有優勢。連接艙更多的作貯存燃料、電池以及通信、遙感等無需人來參與的功能之用。而核心艙在內在空間布局上僅需留出連接和行走用的窄小通道即可,更多的空間優先用于更堅固可靠的結構和 機動裝置。
3.5 應急預案
由于各艙室之間兩兩相連且艙門常閉,在遇到緊急情況(如火災、微流星或是近地太空垃圾等的撞擊等)時,只要核心艙未出現問題,至多需要將問題艙室解除連接拋棄即可。在最極端的情況下也有四個通道可到達核心艙并乘其對接口 另一側的返回艙離開。
4. 一些總結和展望
總體上而言,本設計作空間站時相較于國際空間站有更高的安全性以及更長期在軌工作的能力,并且可為大規模人工重力飛行器的研制起到大量的技術準備作用。同時作為深空探測飛船時也可提供更好的舒適性和穩定性,對太陽系內遠距離深空探測也有一定的實用意義。
5. 參考文獻
[1]果琳麗.在載人深空探測技術導論課程第三講上的授課內容,北京,2018





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




