非線性有限元-弧長法簡介

非線性有限元-弧長法簡介
————CAE仿真實驗室出品
在之前一篇帖子《非線性行為初識》中,我們通過簡單的彈簧桿件結構介紹了非線性問題,回顧一下該問題:如圖所示,中間節點作用一個F的力,會產生一個位移v 
由靜力平衡關系可得到

該方程精確解如下,圖中不同k對應的曲線,可以看到k比較小時,桿內力起主要作用,呈現出幾何非線性,K較大時,彈簧起主要作用,呈現出彈簧的線彈性。
藍色曲線為精確解,紅色點點為固定載荷增量下求得的位移,k=1000時,牛頓迭代法能夠很好地跟蹤載荷位移路徑,得到所有的位移響應。而當k=100時,曲線有下降段,此時牛頓迭代法就沒法得到這個區域的位移響應了。
對于下圖這樣的問題,在拐點處切線剛度為0,在前面的牛頓迭代法中我們是通過給定載荷增量,它已經無法越過極值點得到完整地載荷位移曲線。而且還存在一個載荷對應多個位移,或者一個位移對應多個載荷的情況,很容易發生snap-through和snap-back現象。


今天就來介紹介紹弧長法,牛頓迭代法在翻過山頭延切線方向飛入云霄,直接不收斂。如果讓牛頓坐上過山車,那么就能和軌道綁在一起,沿著軌道平穩著陸了。弧長法也是這么做的,通過引入一組約束方程,把迭代求解的過山車,綁定在軌道上,讓求解過程能夠跟蹤載荷位移路徑。非線性方程組一般可以表示為:

V為位移, 為載荷,加入約束方程f(v,λ)=0
為載荷,加入約束方程f(v,λ)=0


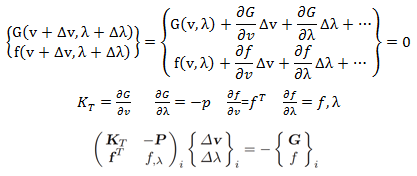
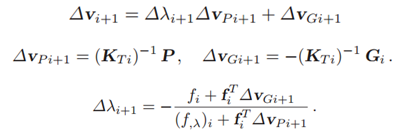
由上式可以得到求解迭代格式:
弧長法的圖形解釋如下,可以看到在一個增量步之中,載荷和位移是同時進行迭代的,載荷增量步也不像牛頓迭代法一樣是常數,而是能長能短,能上能下,走得過山峰爬的了坡,因而弧長法有path-following的本領。

接下來我么采取弧長法求解上面的問題,取如下約束方程:

該函數為一個圓,這更清晰的說明了弧長法的含義,下圖為k=0時的載荷位移曲線,除了極值點處有一些不足(代碼未加弧長控制),弧長法得到了完整地載荷位移曲線。
總結:
至此我們介紹了弧長法的基本原理和迭代格式,可以看到,弧長法的基本思路還是較為清晰和簡單的,關鍵是約束方程的選取,和一些求解的細節包括迭代速度優化,弧長選擇等問題。這只是一個簡單的例子,相信如果大家能夠自己動手推推這個公式,自己編寫一下代碼便會有更加深刻的方法,至于該方法應用到更加復雜的問題和有限元求解格式,還有更多的探討之處,這里先不考慮。
學習有限元奇巧淫技
學習有限元理論知識
了然于心、游刃有余
CAE仿真實驗室,更多有限元干貨等你來拿!歡迎留言討論、若有疑問可私信~






















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




