鏡頭加工總是返工?采購總踩坑?用VirtualLab Fusion&VirtualLab Unity讓“試錯”提前終結。--軸錐鏡選型案例解析

前言
軸錐鏡的核心是圓錐折射:常見的單軸錐鏡由一個圓錐面和一個平面組成,雙軸錐鏡則是兩個圓錐面對稱拼接,關鍵參數包括錐角(通常在 0.1°~10° 之間)、口徑(幾毫米到幾十毫米)和材料(BK7 玻璃、石英、藍寶石等,適配不同波長激光)。它的工作原理并不復雜:當高斯光束垂直入射到圓錐面時,光線會被按錐角規律折射,形成沿光軸方向傳播的 “無衍射貝塞爾光束”—— 這種光束的核心特點是,在一定距離內(無衍射區),光斑中心亮斑的大小和強度幾乎不隨傳播距離變化,哪怕遇到輕微遮擋,也能快速恢復原有形狀。
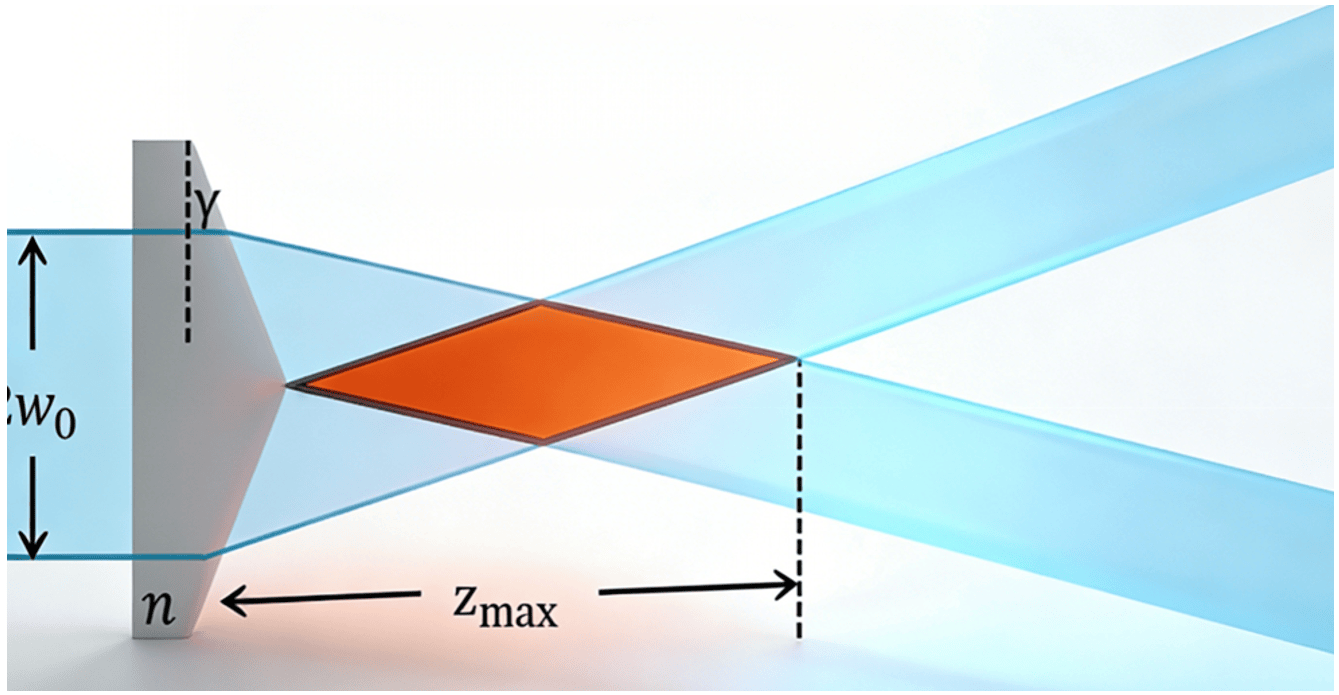
圖1. 軸錐鏡最大衍射距離示意圖
如圖1所示,最大衍射距離Zmax =w0/(n-1)γ, w0為入射光束的半徑,n為折射率,γ為軸錐鏡的物理角度。
為什么同樣是的軸錐鏡,A 廠加工的能出 50mm 無衍射光束,B 廠的卻剛過 30mm 就散斑?為什么采購時參數表寫得一模一樣,收到的樣品卻連光斑中心都帶暗點?軸錐鏡的錐角公差、面型精度、材料選擇,這些看似不起眼的參數,卻藏著 “差之毫厘,謬以千里” 的光學玄機。當光學工程師小李抱著“做50 mm無衍射貝塞爾光束”大的需求,站在加工車間的圖紙前撓頭的時候。有一個人聲音告訴他,“Hey man, you should try VirtualLab Fusion & VirtualLab Unity, it is so powerful!”
想象一下: 有這樣一款軟件,它的場追跡功能如此強大,讓軸錐鏡的加工和選購從 “憑經驗、靠運氣” 變成 “靠數據、有預判”。它不用你反復打磨樣品、來回寄送測試,只需在軟件里復刻真實光學場景,就能提前鎖定最優參數、篩選靠譜供應商,既節省了時間成本,更避免了無效投入 —— 這正是光學工具賦能行業的核心:讓復雜的選擇變簡單,讓反復的試錯變一次到位。這一期我將向大家展示如何利用VirtualLab Fusion加速你的鏡片選型。
打開瀏覽器,搜索“axicon”。軸錐鏡的類型有很多,有鍍膜的、針對紫外的,其它的參數包括通徑、通徑公差、邊緣厚度、角度公差等,這些參數會影響鏡頭的實際效果,我們可以根據這些參數對仿真模型進行深度優化。為了簡單起見,我們直接采用某供貨商官方提供的鏡頭模型。我們看到在某器件供貨商的官網上提供了不同角度的軸錐鏡,點擊紅色圖標可以下載對應的模型文件。
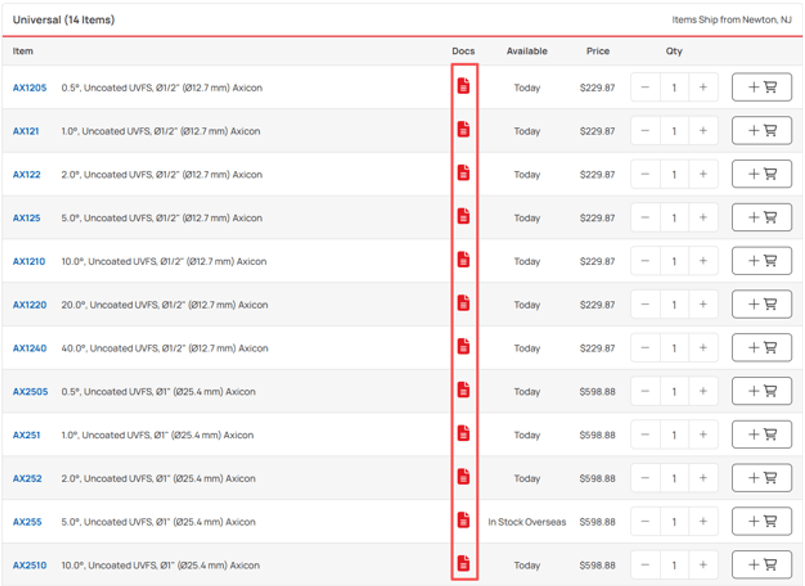
圖2. 某供貨商官網提供的Axicon鏡頭文件
這里我們選擇的是一款未鍍膜的1°軸錐鏡,材料為C79-80。如圖3所示在File中選擇Import>Import xx File,將我們下載的鏡頭文件導入到VirtualLab Fusion中,這里默認采用平面波,波長是550nm
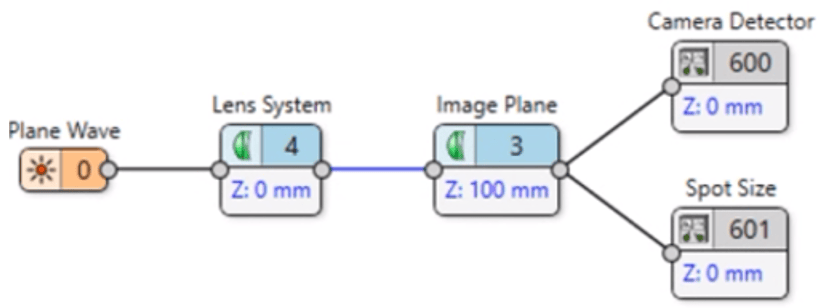
圖3. 導入外部的鏡頭文件生成光路圖
如圖4所示,在VirtualLab Fusion中用Aspherical Surface模擬軸錐面,此外,在軟件內置的表面文件中有幾個軸錐鏡表面的定義。也可以使用軟件內置的Axicon表面。
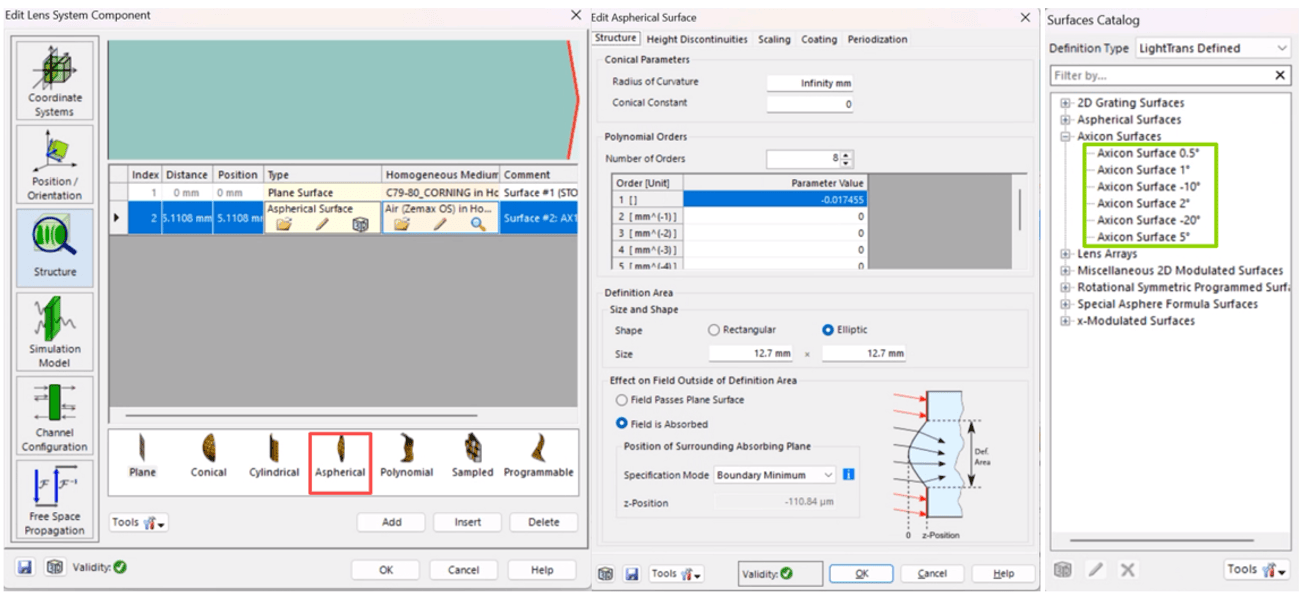
圖4. 編輯軸錐鏡的表面,最右側為軟件內置的不同角度軸錐面
最新發布的VirtualLab Unity套裝支持導入文件進行鏡頭仿真設計,將鏡頭文件導入到VirtualLab Unity之后,可以啟動光線追跡引擎,實現光線追跡及點列圖的繪制。
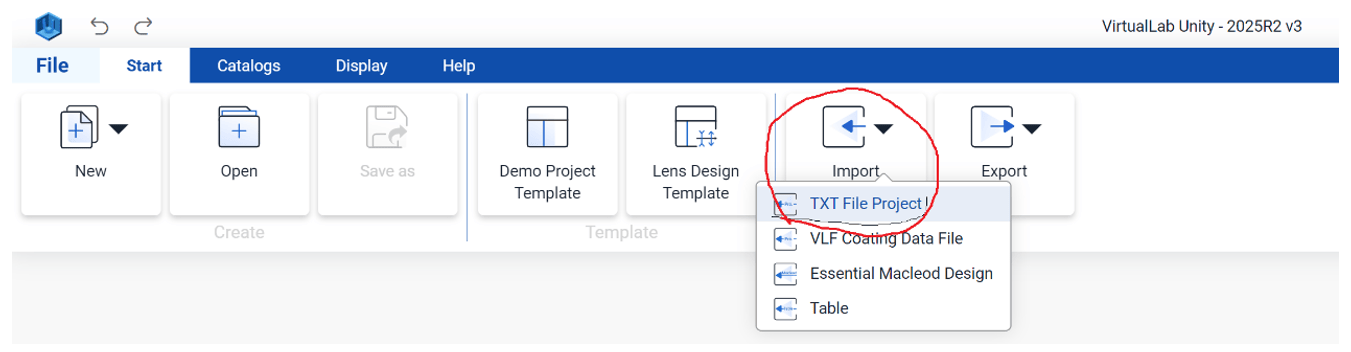
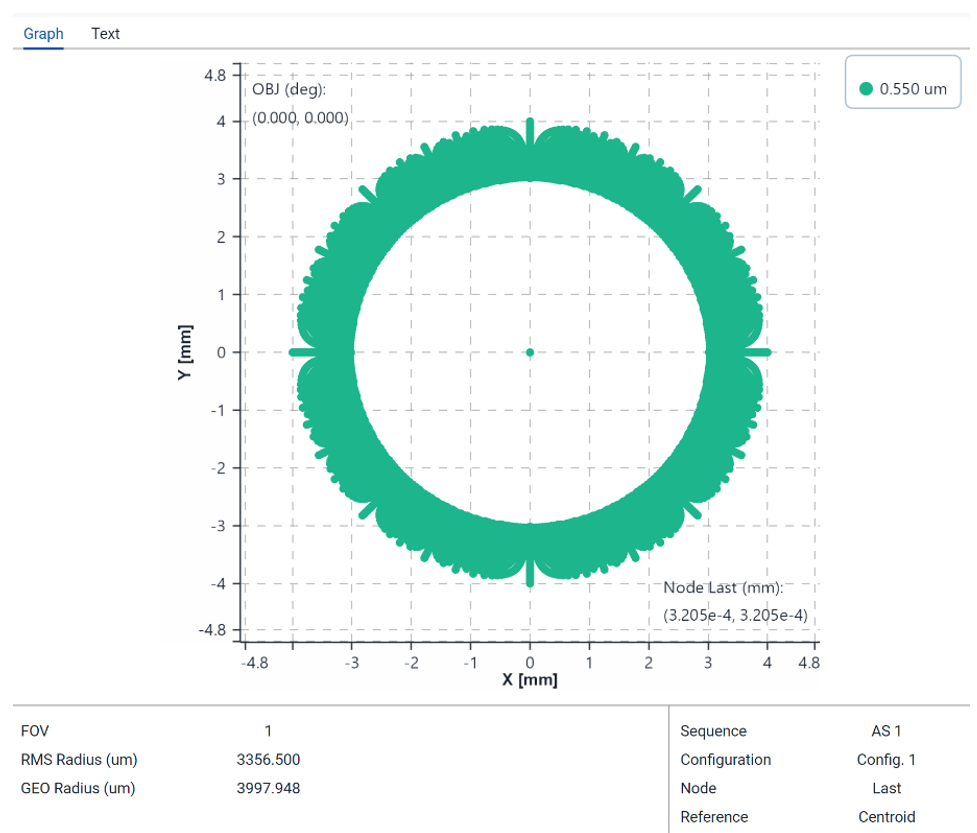
圖5. VirtualLab Unity光線追跡和點列圖
為了查看場追跡的結果,在VirtualLab Fusion中選擇Profile: General場追跡引擎,把像面的位置分別設置為100mm和200mm。在圖6中可以看到在100mm的位置平面波變成了貝塞爾光束,而在200mm的位置近似得到了一個環形光束。在上方的Manipulation中我們可以選擇Forward FFT,得到其頻譜分布,可以看到此時對應的是一個環形譜,這個環形半徑對應的就是橫向波數的大小。
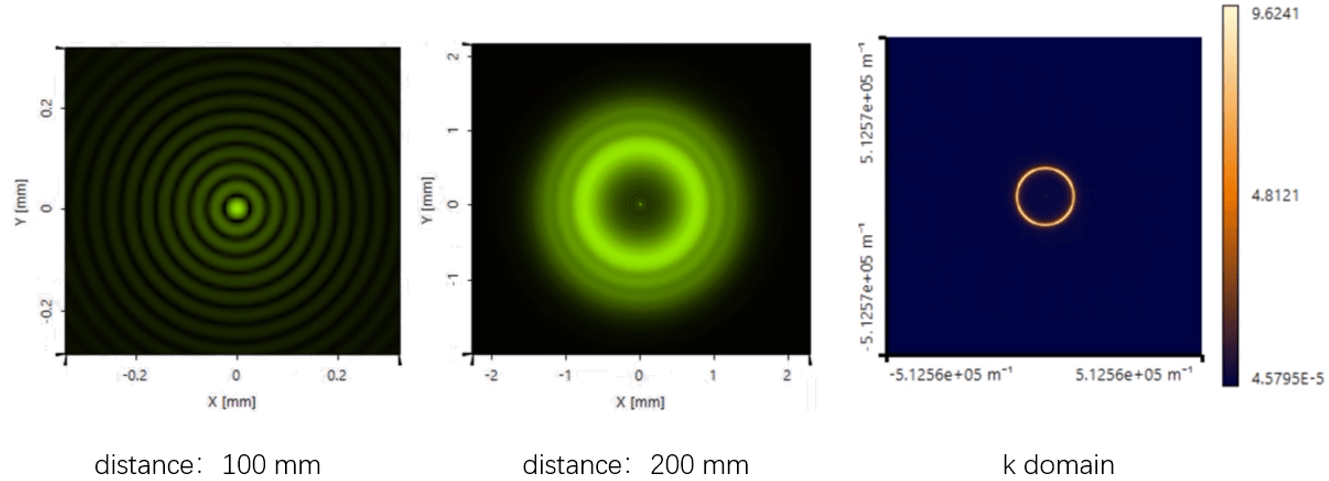
圖6. 軸錐鏡場追跡結果(距離分布為100 mm, 200 mm處以及對應光場的頻譜分布)
從圖7可以看到,場追跡讓我們在選擇采購鏡片之前可以驗證得到的光斑形態,從而降低試錯成本,這不正是光學仿真的意義嗎?有了 VirtualLab Fusion這款“神器”,小李再也不用頭禿了。這已經替他把 “試錯成本” 省了一半 —— 不用對著軸錐鏡的錐角公差 “猜 0.1° 還是 0.2° 合適”,他先點開軟件拖入 “軸錐鏡元件庫”,輸入目標錐角 1°、石英材料、20mm 口徑,鼠標一點 “仿真”,屏幕上立刻跳出貝塞爾光束的無衍射區長度、邊緣衍射雜光分布;再故意把錐角往大拉 0.1°,光斑瞬間從 “筆直的亮線” 散成邊緣模糊的光暈 —— 這下他拍著加工師傅的肩膀說:“錐角公差卡到 ±0.05°,不然光束‘撐不到’50mm。”
到了采購環節,三家供應商發來的軸錐鏡參數表堆在桌角,小李沒急著下單樣品,而是把每家的面型粗糙度、錐頂圓度數據挨個輸進 VirtualLab Fusion和VirtualLab Unity:A 家的錐頂圓度 0.5μm,仿真里貝塞爾光斑中心多了個暗點;B 家的面型精度差 0.2λ,無衍射距離直接縮了 10mm;只有 C 家的參數跑出來的光斑,和他在軟件里 “畫的餅” 一模一樣 —— 他直接把仿真對比圖甩給采購:“就選 C,省得寄樣品測一周。”
從加工車間的 “錐角公差該松該緊”,到采購間的 “哪家參數真能用”,VirtualLab Fusion 和VirtualLab Unity像個 “光學預判官”:不用抱著實物跑實驗室,不用等加工完才發現光束 “歪了”,把軸錐鏡的錐角、材料、面型誤差都揉進仿真里,加工師傅知道 “卡到哪步不返工”,采購知道 “哪家參數沒摻水”,連最終裝到系統里的貝塞爾光束,都和仿真里的光斑幾乎沒差。
從高校實驗室的 “理論驗證” 到工程現場的 “落地應用”,幾何追跡與場追跡的核心價值,早已超越 “分析光斑” 本身。它讓科研人員不必再為 “理論與實驗脫節” 發愁,通過光線傳播的精準復刻,快速鎖定光斑缺陷的幾何成因;讓工程師無需再靠 “試錯打磨” 摸索,借助場分布的細致拆解,提前規避雜光、衍射等隱形問題。這兩種追跡方法,本質是為光學研究與工程實踐搭建了 “從預判到驗證” 的橋梁,讓每一次光斑分析都有數據支撐,每一次設計優化都有明確方向 —— 最終讓科研創新更高效、工程落地更穩妥,這正是光學模擬賦能行業的深層邏輯:以精準洞察,驅動無限可能。





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




