VirtualLab Fusion中運用optiSLang進行光柵優化
摘要 現代光學系統的優化一般會涉及到大量的參數,例如:優化光柵時不僅需要考慮光柵的幾何參數,還有所需的入射方向。隨著參數數量的大量增加,優化越來越具有挑戰性。對于這種情況,VirtualLab Fusion提供了與Dynardo的optiSLang軟件的接口,可以使用不同的高級優化算法。 VirtualLab Fusion和optiSLang的界面 VirtualLab Fusion是一種靈活且可定制的建模工具平臺,可以仿真復雜的光學裝置,例如:將一組平面波耦合入光波導。
現代光學系統的優化一般會涉及到大量的參數,例如:優化光柵時不僅需要考慮光柵的幾何參數,還有所需的入射方向。隨著參數數量的大量增加,優化越來越具有挑戰性。對于這種情況,VirtualLab Fusion提供了與Dynardo的optiSLang軟件的接口,可以使用不同的高級優化算法。 VirtualLab Fusion和optiSLang的界面 VirtualLab Fusion是一種靈活且可定制的建模工具平臺,可以仿真復雜的光學裝置,例如:將一組平面波耦合入光波導。 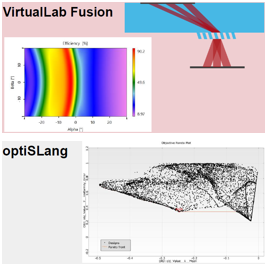
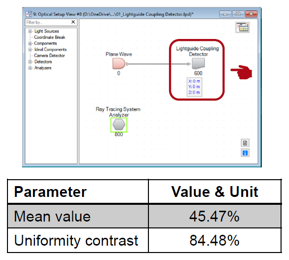
optiSLang是一種包含各種高級工具的軟件平臺,包括敏感度分析、多元和多學科優化、魯棒性評估、可靠性分析和魯棒設計優化。 兩種軟件平臺的結合使得例如智能光波導耦合等高級光柵結構變為可能。 VirtualLab Fusion – 光學裝置初始化 初始裝置─ 一般來說,在VirtualLab中定義的光學系統都可以使用optiSLang進行優化。─ 該例中的光學系統包含了平面波光源和用于周期性介質的波導耦合探測器。 VirtualLab Fusion – 波導耦合探測器 波導耦合探測─ 波導耦合探測器是一種特殊工具,用以探測某個周期性結構以特定角度范圍入射的效率。─ 可以從探測器的編輯對話框中的目錄定義或加載周期性結構。
VirtualLab Fusion – 波導耦合探測器 波導耦合探測─ 波導耦合探測器是一種特殊工具,用以探測某個周期性結構以特定角度范圍入射的效率。─ 可以從探測器的編輯對話框中的目錄定義或加載周期性結構。 VirtualLab Fusion – 波導耦合探測器波導耦合探測─ 該例中使用了傾斜光柵。
VirtualLab Fusion – 波導耦合探測器波導耦合探測─ 該例中使用了傾斜光柵。 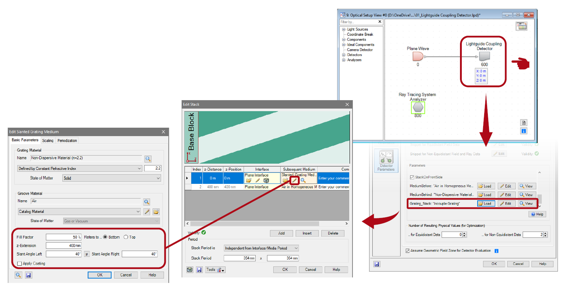 VirtualLab Fusion – 波導耦合探測器波導耦合探測─ 該例中使用了傾斜光柵。
VirtualLab Fusion – 波導耦合探測器波導耦合探測─ 該例中使用了傾斜光柵。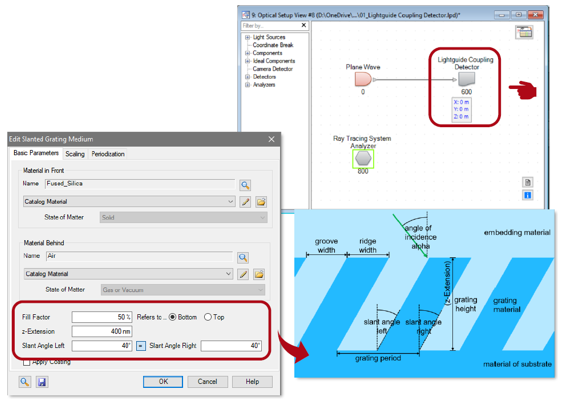
VirtualLab Fusion – 波導耦合探測器 波導耦合探測─ 輸入光源的入射角度范圍在探測器編輯對話框中指定。─ 通過最小和最大笛卡爾坐標系角度alpha和beta與它們的采樣點數定義。 VirtualLab Fusion – 波導耦合 波導耦合探測─ 可以從探測得到的效率計算平均值和均勻對比度,并在探測器結果標簽頁中給出。─ 作為結果,探測器可以用于評估在特定角度范圍內的周期性結構。
VirtualLab Fusion – 波導耦合 波導耦合探測─ 可以從探測得到的效率計算平均值和均勻對比度,并在探測器結果標簽頁中給出。─ 作為結果,探測器可以用于評估在特定角度范圍內的周期性結構。
 VirtualLab Fusion – 輸出LPD至OPtiSLang 輸出LPD至OPtiSLang─ File→Export→Export to optiSlang Project
VirtualLab Fusion – 輸出LPD至OPtiSLang 輸出LPD至OPtiSLang─ File→Export→Export to optiSlang Project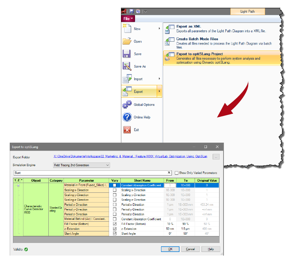 VirtualLab Fusion – 輸出LPD至OPtiSLang 輸出LPD至OPtiSLang─ File→Export→Export to optiSlang Project─ 輸出LPD文件,并產生輸入至optiSLang的必要光學裝置文件。
VirtualLab Fusion – 輸出LPD至OPtiSLang 輸出LPD至OPtiSLang─ File→Export→Export to optiSlang Project─ 輸出LPD文件,并產生輸入至optiSLang的必要光學裝置文件。  VirtualLab Fusion – 輸出LPD至OPtiSLang 輸出LPD至OPtiSLang─ 在輸出對話框窗口。? 可定義參數空間,并包含了參數的變化范圍。? 可以選擇保存到的輸出文件夾。? 可以指定模擬引擎,用于分析。
VirtualLab Fusion – 輸出LPD至OPtiSLang 輸出LPD至OPtiSLang─ 在輸出對話框窗口。? 可定義參數空間,并包含了參數的變化范圍。? 可以選擇保存到的輸出文件夾。? 可以指定模擬引擎,用于分析。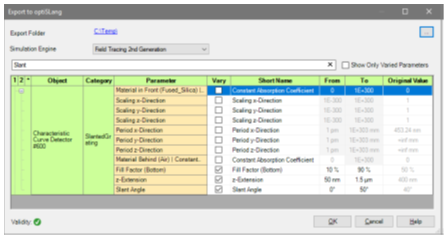 optiSLang – 初始化優化 設置求解器系統─ File→New project…
optiSLang – 初始化優化 設置求解器系統─ File→New project… 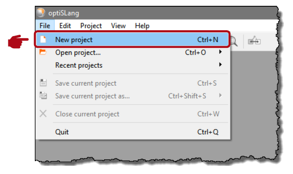 optiSLang – 初始化優化 設置求解器系統─ 繼續,拖動求解器(Solver)向導到場景(Scenery)窗口。─ 打開了一個對話框,列出了幾種求解器(Solver)范例。─ 求解器(Solver)范例中必須選擇VirtualLab。
optiSLang – 初始化優化 設置求解器系統─ 繼續,拖動求解器(Solver)向導到場景(Scenery)窗口。─ 打開了一個對話框,列出了幾種求解器(Solver)范例。─ 求解器(Solver)范例中必須選擇VirtualLab。 
optiSLang – 初始化優化 設置求解器系統─ 然后會彈出文件對話框,必須打開VirtualLab輸出的system.lpd文件。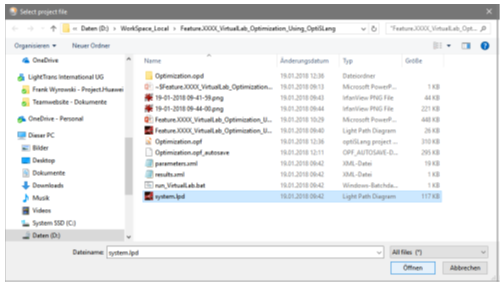 optiSLang – 初始化優化 參數化的求解器系統─ 參數化的求解器系統包含相應的VirtualLab文件和兩個含有參數和結果的XML文件,用于定義優化函數。─ 請務必保存計劃。
optiSLang – 初始化優化 參數化的求解器系統─ 參數化的求解器系統包含相應的VirtualLab文件和兩個含有參數和結果的XML文件,用于定義優化函數。─ 請務必保存計劃。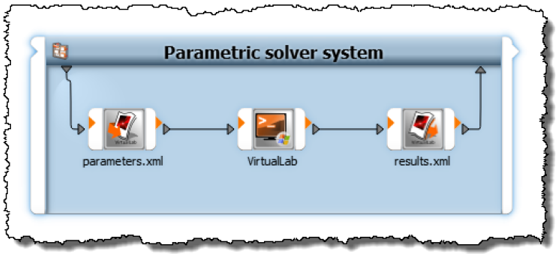 optiSLang – 初始化優化 參數化的求解器系統─ 運行求解器系統以檢查是否能正常工作并給出預期的結果。
optiSLang – 初始化優化 參數化的求解器系統─ 運行求解器系統以檢查是否能正常工作并給出預期的結果。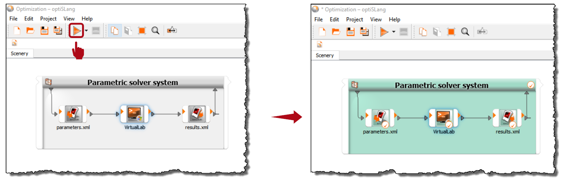 optiSLang – 初始化優化 參數化的求解器系統─ 運行求解器系統以檢查是否能正常工作并給出預期的結果。─ 通過雙擊結果(Result)設計標簽頁中的參數化(Parametric)求解器系統窗口,可以檢查參數和結果。
optiSLang – 初始化優化 參數化的求解器系統─ 運行求解器系統以檢查是否能正常工作并給出預期的結果。─ 通過雙擊結果(Result)設計標簽頁中的參數化(Parametric)求解器系統窗口,可以檢查參數和結果。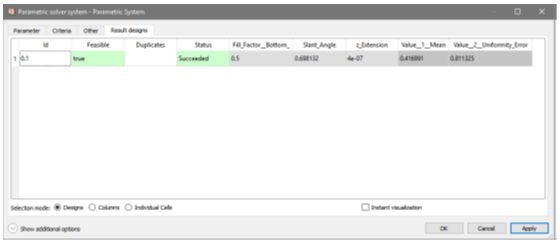 optiSLang –設置優化 參數化的求解器系統─ optiSLang可以進行多目標函數的光學系統優化。─ 這可以在參數化(Parametric)求解器系統配置的判據(Criteria)標簽頁中定義。
optiSLang –設置優化 參數化的求解器系統─ optiSLang可以進行多目標函數的光學系統優化。─ 這可以在參數化(Parametric)求解器系統配置的判據(Criteria)標簽頁中定義。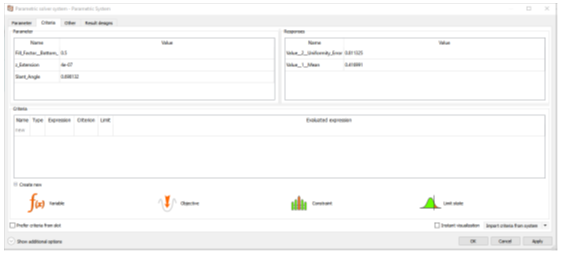 optiSLang –設置優化 參數化的求解器系統─ 可以通過拖動均勻化對比度(Uniformity Contrast)到目標最小化(Objective Minimize)判據中定義第一目標函數。─ 因此優化算法會盡可能地使均勻度對比最小化。
optiSLang –設置優化 參數化的求解器系統─ 可以通過拖動均勻化對比度(Uniformity Contrast)到目標最小化(Objective Minimize)判據中定義第一目標函數。─ 因此優化算法會盡可能地使均勻度對比最小化。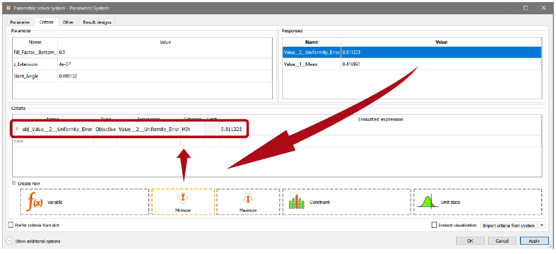 optiSLang –設置優化 參數化的求解器系統─ 可以通過拖動平均值(Mean)到目標最小化(Objective Maximize)判據中定義第二目標函數。─ 因此優化算法會盡可能地使平均效率最大化。─ 這步操作被稱為多目標優化。
optiSLang –設置優化 參數化的求解器系統─ 可以通過拖動平均值(Mean)到目標最小化(Objective Maximize)判據中定義第二目標函數。─ 因此優化算法會盡可能地使平均效率最大化。─ 這步操作被稱為多目標優化。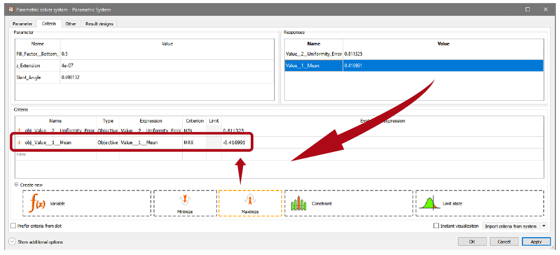 optiSLang –設置優化 優化向導─ 下一步可以通過拖放來使用優化向導。
optiSLang –設置優化 優化向導─ 下一步可以通過拖放來使用優化向導。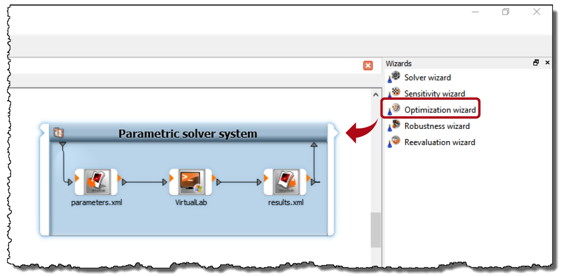 optiSLang –設置優化 優化向導─ 第一步,提供了各種系統參數,包括其指定的值范圍。─ 此外,optiSLang提供了一個可視化的值范圍,其中標出了初始值。─ 然后點擊下
optiSLang –設置優化 優化向導─ 第一步,提供了各種系統參數,包括其指定的值范圍。─ 此外,optiSLang提供了一個可視化的值范圍,其中標出了初始值。─ 然后點擊下





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




