使用Fidelity Pointwise對(duì) 5 種不同幾何形狀進(jìn)行高階網(wǎng)格劃分

傳統(tǒng)上,向網(wǎng)格添加單元(稱為 H 細(xì)化)是提高解精度的主要方法。額外的分辨率能夠捕獲通常由同一網(wǎng)格的較粗變化擴(kuò)散的流動(dòng)現(xiàn)象。用于提高空間和時(shí)間精度的另一種技術(shù)是通過(guò)執(zhí)行度數(shù)提升,既針對(duì)給定單元內(nèi)的假設(shè)解又針對(duì)單元本身,稱為高階 (HO) 網(wǎng)格劃分。這樣做時(shí),線性網(wǎng)格可以通過(guò)沿邊、面和內(nèi)部添加節(jié)點(diǎn)而變得彎曲。這樣就需要更少的元素來(lái)準(zhǔn)確地表示彎曲幾何形狀并捕獲感興趣的復(fù)雜流動(dòng)特征。
** 在表征 HO 網(wǎng)格時(shí),請(qǐng)務(wù)必注意,其階數(shù)等于其多項(xiàng)式次數(shù)加一。因此,線性網(wǎng)格的階數(shù)為 1,階數(shù)為 2,二次網(wǎng)格的階數(shù)為 2,階數(shù)為 3,等等。
1. 球體
球體由聚集在球體表面的各向異性單元層進(jìn)行網(wǎng)格劃分,過(guò)渡到各向同性遠(yuǎn)場(chǎng)四面體網(wǎng)格。生成三種單元類型(僅四面體、棱柱和四面體以及混合單元)和四種多項(xiàng)式次數(shù)(線性、二次、三次和四次)的網(wǎng)格。
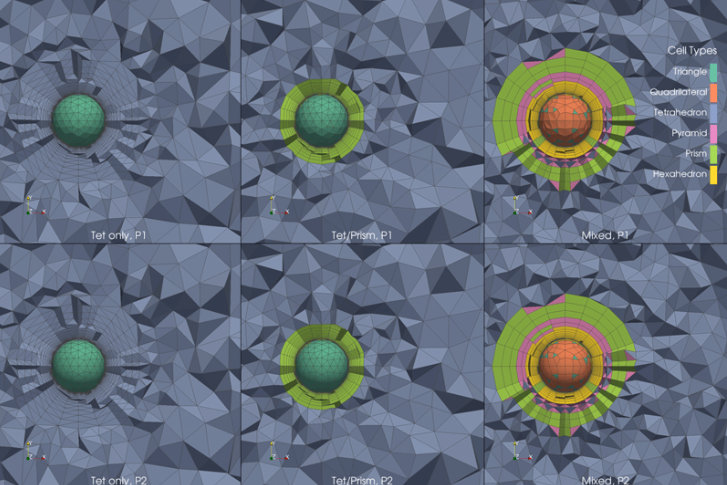
圖 1. P1 網(wǎng)格位于頂行,P2 網(wǎng)格位于底行。
2. 僅機(jī)翼幾何形狀
HO 網(wǎng)格是在第三屆AIAA 阻力預(yù)測(cè)研討會(huì) (DPW)的僅機(jī)翼幾何體上生成的。為了保持自由度數(shù)相對(duì)恒定,原始線性網(wǎng)格中的單元數(shù)隨著多項(xiàng)式次數(shù)依次增加而減少。體積網(wǎng)格由表面附近的各向異性單元層組成,這些單元在遠(yuǎn)場(chǎng)中過(guò)渡為各向同性四面體。
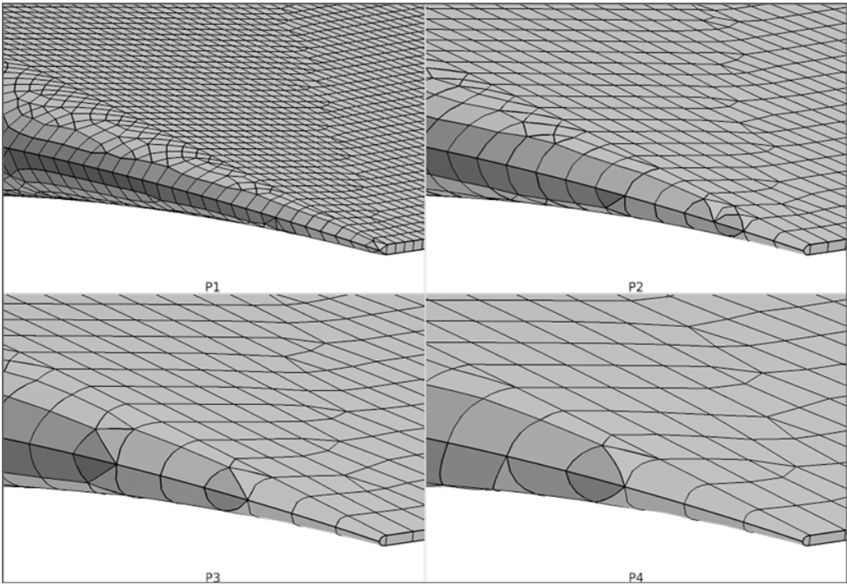
圖 2. DPW 3 機(jī)翼表面網(wǎng)格、尖端區(qū)域和前緣的特寫視圖。從左上角順時(shí)針?lè)较颍篜1、P2、P4、P3。
3.羅賓機(jī)身
通用 ROBIN 機(jī)身使用 Pointwise 進(jìn)行網(wǎng)格劃分,然后提升到 P2 網(wǎng)格。創(chuàng)建了兩個(gè)線性網(wǎng)格和兩個(gè) P2 網(wǎng)格,目標(biāo)是每個(gè)粗略和精細(xì)版本的 P1 和 P2 網(wǎng)格中的節(jié)點(diǎn)數(shù)量大致相同。
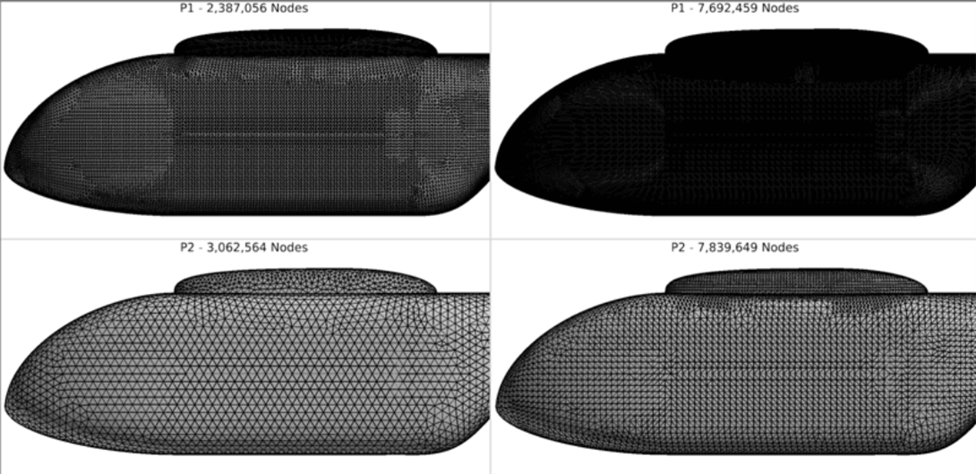
圖 3.ROBIN 機(jī)身的 P1(頂行)和 P2(底行)精細(xì)和粗略表面網(wǎng)格。
4. 機(jī)頭起落架配置
來(lái)自第三屆AIAA 機(jī)身噪聲計(jì)算基準(zhǔn)問(wèn)題研討會(huì)的飛機(jī)前起落架配置 用于高階網(wǎng)格生成。使用 Fidelity Pointwise 軟件將配置的粗線性網(wǎng)格提升至 P2。
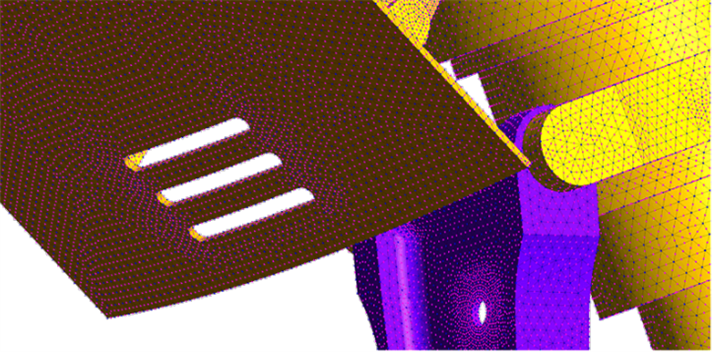
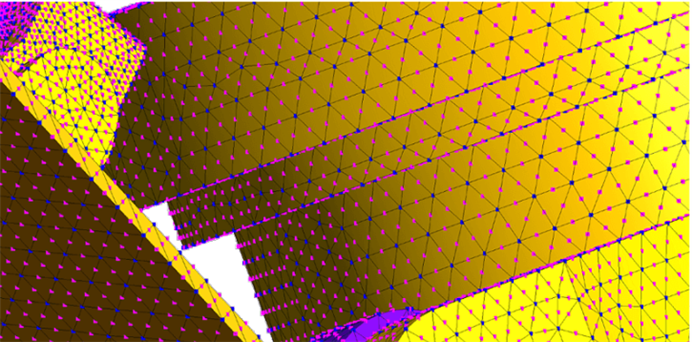
圖 4. BANC III 起落架與插入的 P2 節(jié)點(diǎn)嚙合(左),BANC III P2 網(wǎng)格的特寫視圖(右)。
5. NASA CRM 翼身
本研究使用第六屆 AIAA CFD 阻力預(yù)測(cè)研討會(huì)的 NASA 機(jī)翼-機(jī)身配置通用研究模型。粗分辨率、線性、非結(jié)構(gòu)化四面體網(wǎng)格用作 P2 和 P3 高階網(wǎng)格的基礎(chǔ)。生成由混合元素組成的新表面網(wǎng)格,并作為 P4 網(wǎng)格的基礎(chǔ)。
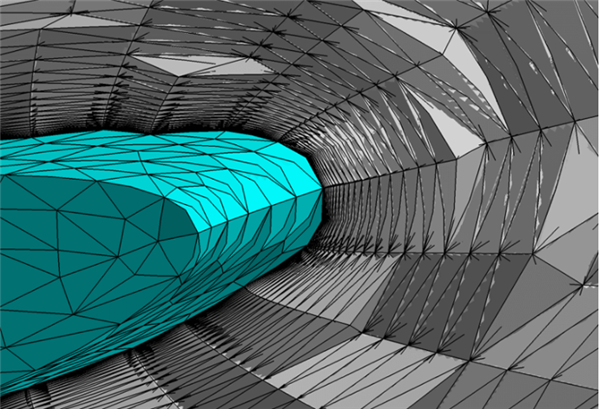
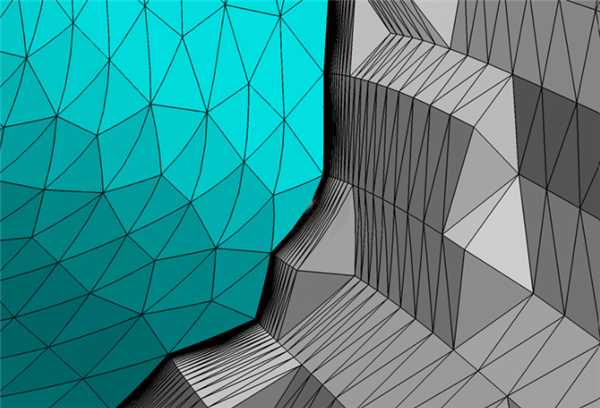
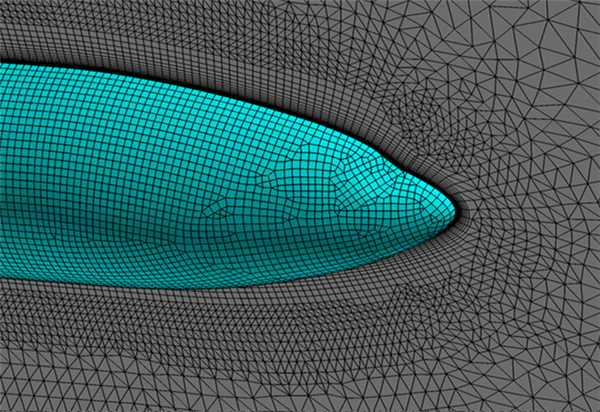
圖 5. 靠近翼尖后緣的 DPW6 CRM 翼身配置的 P2 網(wǎng)格的軸向切割(左),尾部凹口附近的 DPW 6 翼身配置的 P3 網(wǎng)格的軸向切割(中),混合用于 DPW6 翼身配置的 element P4 網(wǎng)格(右)。
參考
Steve L. Karman、J. Taylor Erwin、Ryan S. Glasby 和 Douglas L. Stefanski,“使用 WCN 優(yōu)化的高階網(wǎng)格彎曲”,AIAA 論文第 1 號(hào)。2016-3178,2016 年 6 月。
文章來(lái)源:cadence博客





















工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP




