電磁振動噪聲水平是衡量電動汽車舒適性的綜合指標。徑向電磁力是電磁振動噪聲的主要激振源。對電動汽車驅動用永磁同步電機(PMSM)的徑向電磁力進行分析,對徑向電磁力時空分離得到的三維頻譜圖提取出對電磁噪聲影響較大的時空階次及力密度,再運用有限元法對轉子不同方式分段斜極的PMSM進行振動噪聲仿真,通過結果對比找到最優的轉子分段斜極方式。
轉子不同方式分段斜極對永磁同步電機噪聲的影響
范慶鋒1,2,王光晨1,2
(1.中車株洲電機有限公司,湖南 株洲412001;2.湖南省新能源汽車電機工程技術研究中心,湖南 株洲412001)
隨著新能源汽車領域的發展,驅動電機各方面的性能不斷提升,對電磁噪聲提出了更高的要求。因為電磁噪聲主要來源于電機驅動系統,所以驅動用永磁同步電機(PMSM)的噪聲水平直接影響電動汽車的舒適性[1-3]。
PMSM電磁力可分為切向電磁力和徑向電磁力2種,前者主要用于輸出電磁轉矩,但會引起轉矩脈動,使定子齒部彎曲變形;后者使電機的定子鐵心產生周期性形變而引起振動噪聲,是引起電機振動噪聲的主要原因[4-5]。
電機的振動噪聲涉及電磁、機械、力學、聲學等多個領域,研究方法主要有解析法、有限元法和試驗法[6]。文獻[7]通過對8極48槽PMSM進行了不同斜極分段數的徑向電磁力仿真,分析了不同斜極分段數下電磁力波主要階次的變化規律和對振動噪聲的影響,但并沒有研究不同斜極方式對電機振動噪聲的影響;文獻[8]研究了轉子分段斜極與徑向電磁力的之間關系,但并沒有進一步研究對電磁噪聲的影響;文獻[9]提出了轉子通過分段斜極以削弱齒諧波,降低0階電磁力的改進方案,降低了電機的電磁噪聲,但沒有分析徑向電磁力對電磁振動的影響。研究轉子不同方式分段斜極對電磁振動噪聲的影響對電磁振動噪聲的研究和抑制具有一定的意義,但目前國內相關研究較少。
本文
以1臺額定功率100 kW的純電動客車驅動用PMSM為研究對象,利用有限元方法對電磁振動噪聲進行仿真計算,通過對比分析轉子不同方式分段斜極的諧響應和聲場結果,得到最優的轉子斜極方式。
本文用于振動噪聲研究的PMSM轉子拓撲如圖1所示。PMSM參數如表1所示。
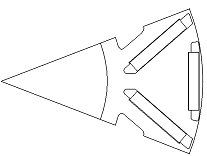
表1 PMSM參數
定子鐵心受到的徑向電磁力遠遠大于切向電磁力,且在電機運行的過程中隨著時空交變,是電磁振動噪聲的主要激振源,因此本文只考慮徑向電磁力。由于磁導率的影響,
切向氣隙磁密遠
遠小于徑向氣隙磁密,前者
可忽略不計
,則徑向電磁力密度可以近似表示為


式中:fr為轉子永磁磁動勢;fs為定子電樞反應磁動勢;g為氣隙長度。
對定子電樞反應磁動勢和轉子永磁磁動勢進行傅里葉分解,可得:
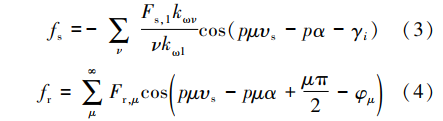
式中:ν為電樞反應磁場諧波次數;Fs,1為定子電流產生的基波磁勢幅值;kων、kω1為繞組系數;p為極對數;υs為定子參考位置;α為旋轉角;γi為電流角;μ為轉子永磁磁場諧波次數;Fr,μ為永磁體產生的諧波磁勢幅值;φμ為轉子磁動勢初相角。
由于α為轉子分段斜極的機械角度,則各轉子鐵心段之間錯開的角度αt與分段數n有關,可以表示為

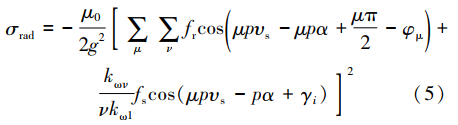
只考慮定轉子之間的耦合作用,徑向電磁力密度可以表示為
當μ=ν或μ=-ν時會產生空間0階次的電磁力,該階次的電磁力對振動噪聲的影響最大,
因此主要關注空間0階次下電磁力密度大的電磁力[10]
。
在轉子分段不斜極的情況下,對本文研究的12極72槽PMSM空載和額定負載工況下的電磁力進行時空分離得到三維頻譜圖,從中找出引起振動噪聲主要電磁力波的時空階次及電磁力密度,如圖2所示。
電磁振動噪聲影響較大的電磁力波時空階次和力密度,如表2所示。
表2 徑向電磁力波階次及力密度
從表2可以看出,
空載和額定負載工況下,空間階次為0、時間次數為72的電磁力密度均是最大的,對電磁振動噪聲的影響也是最大的,主要由11次和13次諧波引起
;其次空間階次為0、時間次數為36的電磁力,對振動噪聲的影響比較大,主要由5次和7次諧波引起[11-13]。
由于72階電磁力密度最大,重點分析不同斜極方式下72階電磁力對振動噪聲的影響。
為了驗證不同分段斜極方式對電機振動噪聲的影響,應用ANSYS有限元法對PMSM振動噪聲進行仿真分析。該純電動客車驅動用PMSM采用12極72槽的配合方式,轉子分段斜極一個定子齒距5°,分別建立不同方式的轉子分段斜極的電磁模型進行振動噪聲仿真。
轉子分段斜極不僅能夠削弱諧波,優化齒槽轉矩和轉矩脈動,還能有效降低徑向電磁力造成的振動噪聲[14]。
轉子斜極方式和分段數的選取均對電機的振動噪聲有影響。本文將轉子鐵心分為6段,對轉子進行
分段不斜極、Z型斜極、單邊斜極和雙邊斜極
的處理,分別對4種轉子進行振動噪聲的仿真分析,如圖3所示。
在上述分段斜極的基礎上,以第一段為參考,匯總各段錯開的機械角度,如表3所示。
表3 轉子不同斜極方式下各段錯開角度 (°)

建立PMSM定子的三維模型,用于諧響應分析和聲場仿真計算;選取驅動電機最大外特性曲線上的工作點按轉速為增量添加到各電磁仿真模型,將隨轉速變化的電磁力分別添加到各段定子鐵心模型的對應齒上,再添加約束條件、求解設置,得到電機的諧響應分析結果[15]。
在諧響應計算結果中提取出隨轉速逐漸變化的36階和72階等效輻射功率,如圖4所示。
匯總不同斜極方式中36階和72階等效輻射功率的最大值,如表4所示。
表4 不同斜極方式的最大等效輻射功率 (dB)
(1) 隨著轉速的增加,每個階次的等效輻射功率均呈上升狀態,斜極方式不同,但均表現為72階最明顯,其次是36階,這與電磁力時空分離的結果相吻合,主要與電機的12極72槽配合有關。
(2) 對于不同斜極方式產生的等效輻射功率而言,轉子分段不斜極的效果最差,輻射功率最大值為110.08 dB,其次是單邊斜極、Z-Z型斜極,雙邊斜極的等效輻射功率最低,為85.39 dB,效果最優。
在上述諧響應計算結果的基礎上進行電機多轉速工況的噪聲仿真。建立電機聲場的仿真模型,在電機外表面構建1 000 mm的空氣包絡,并對其進行網格剖分、導入載荷和聲域求解設置,仿真計算得到電機的聲場結果。
從不同斜極方式的聲場計算結果中提取隨轉速變化的36階和72階聲功率曲線,如圖5所示。
不同斜極方式下36階和72階聲功率的最大值如表5所示。
表5 不同斜極方式的最大聲功率 (dB)
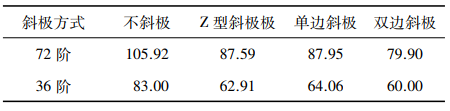
由以上分析可以看出,對于本文所研究的驅動用PMSM而言,轉子分段不斜極的效果最差,
轉子雙邊斜極的效果最好
,二者的最大聲功率相差26 dB,聲場計算結果如圖6所示。
(1) 不同斜極方式的36階和72階聲場計算結果與諧響應分析的結果基本一致,均隨著轉速的增加呈上升趨勢,且72階表現的最明顯。
(2) 轉子分段不斜極時的聲功率最大,為105.92 dB;其次是單邊斜極、Z型斜極;雙邊斜極的聲功率最低,降噪效果最優,最大值79.90 dB。
本文以1臺額定功率100 kW的純電動客車驅動用PMSM為例進行轉子不同方式分段斜極的振動噪聲仿真,通過對比分析得到以下結論:
(1) 電機產生的振動噪聲主要受徑向電磁力的影響,該徑向電磁力主要與極槽配合有關。本文采用12極72槽的配合方式,72階電磁力對振動噪聲的影響最大,其次是36階電磁力。
(2) 在轉子分段數相同的情況下,轉子斜極方式不同,對振動噪聲的削弱也不一樣,對于本文所研究的電機而言,雙邊斜極產生的振動噪聲最低,效果最好。
文章來源:電機與控制應用


























