水下航行器是一個復雜的多學科交叉耦合系統,設計過程涉及多個學科領域的知識和技術難點,如水下環境、水動力學、導航和定位、通信和數據傳輸、能源管理、自主性和智能化,以及可靠性和安全性等。解決這些難點需要跨學科的合作和創新思維,結合機械工程、電子工程、控制工程、材料科學、海洋科學和計算機科學等多個領域的知識和技術。
基于模型的系統工程(MBSE)作為一種先進系統設計方法論,可利用計算機模型和仿真技術來指導和優化系統設計過程。在水下航行器的設計過程中,MBSE可以發揮重要的作用,幫助設計師理解系統的行為、性能和相互關系,并優化設計方案。
以下是基于模型的系統工程在水下航行器設計中的一般步驟:
定義需求:明確水下航行器的功能和性能需求。這些需求可能包括航行速度、潛水深度、載荷能力、能源消耗等。
建立系統模型:利用計算機軟件或仿真工具建立水下航行器的系統模型。模型可以包括船體結構、推進系統、導航和控制系統等各個組成部分。
驗證和測試:基于模型設計的水下航行器原型進行驗證測試,驗證系統模型的準確性和可靠性。根據測試結果對模型進行校準和調整。
優化和迭代:根據驗證測試的結果,對系統模型進行優化和迭代,進一步改進水下航行器的設計。這可能涉及到組件替換、參數調整或系統配置的更改等。
強化學習和自適應控制:基于模型的系統工程(MBSE)可以結合強化學習和自適應控制算法來改善水下航行器的控制性能。通過模型預測和反饋控制,可以實現對航行器的自適應調整和優化,以適應不同的水下環境和任務需求。
故障模擬和容錯設計:系統模型可以用于故障模擬和容錯設計,通過模擬不同故障場景,評估水下航行器在故障情況下的性能和安全性。基于模型的容錯設計可以提高水下航行器的可靠性和穩定性,并在故障發生時采取適當的措施保證任務的完成。
跨學科優化:水下航行器的設計需要涉及多個學科領域,如流體力學、材料科學、控制工程等。基于模型的系統工程可以促進不同學科之間的合作和交流,通過模型集成和多學科優化,實現水下航行器設計的綜合優化。
集成測試和驗證:系統模型可以用于水下航行器的集成測試和驗證。通過模型模擬航行器與其他設備、傳感器和通信系統的集成,評估整個系統的性能和兼容性。這有助于發現和解決潛在的集成問題,提高系統的可靠性和一體化程度。
綜上所述,MBSE在水下航行器設計過程中具有重要的作用。它可以提供全面的設計優化和評估手段,促進不同學科領域的合作,提高水下航行器的性能、可靠性和安全性。這種方法有助于推動水下航行器技術的發展,并應用于海洋勘探、海洋科學研究、水下救援等領域。
MBSE在水下航行器設計過程中進行廣泛應用可能會面臨一些挑戰和困難。
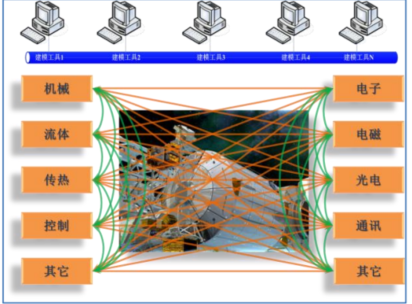
1)多學科耦合:水下航行器是一個多學科交叉耦合的系統,涉及船體結構、動力系統、控制系統、電子設備等多個方面。設計團隊可能使用多種建模軟件來支持不同方面的設計和仿真。如控制系統用的比較多的是Matlab/Simulink、MWorks、動力學系統可能用Adams或者Simpack、液壓領域則是AMESim最為優秀、發動機模型可能會用到Wave-RT 或者GTPower、空調系統會采用Dymola、此外還有很多與復雜系統建模相關的工具例如MapleSim和SimulationX、甚至是C/C++、Fortran 模型等,在進行仿真測試時,需要綜合考慮各個方面的相互影響和交互作用。建立準確的多學科耦合模型并進行仿真是具有挑戰性的。
2)復雜性和精確性:水下航行器系統具有復雜的結構和功能,需要考慮多種因素和物理現象。為了獲得準確的仿真結果,需要建立準確的數學模型,并使用精確的物理參數和假設。這需要大量的計算資源和時間。
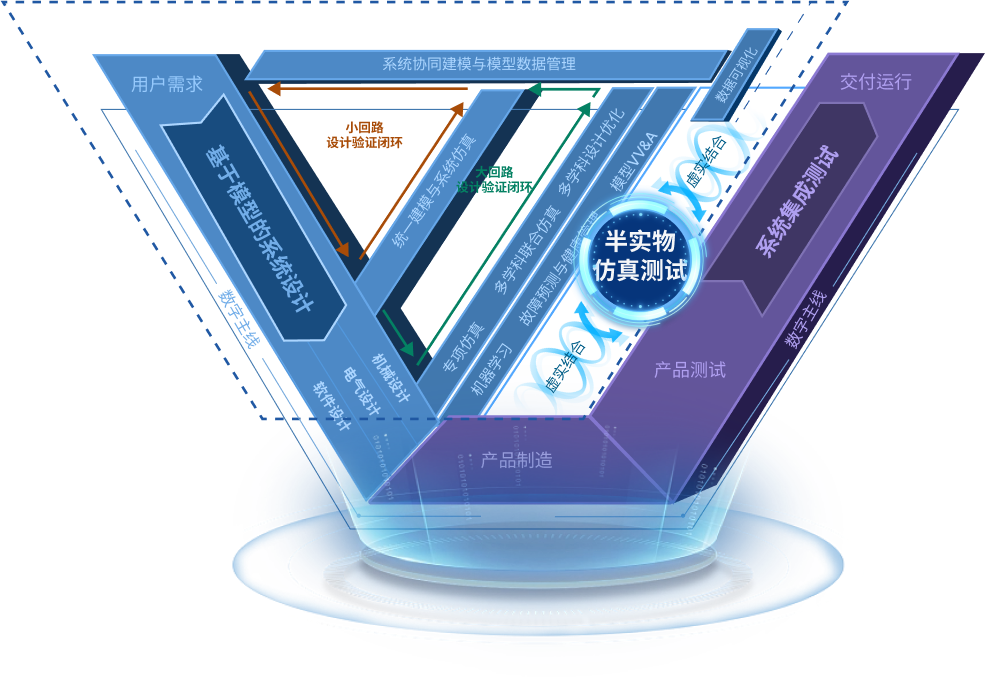
3)仿真測試一體化:現代V字形產品開發流程強調從需求、到設計、仿真、測試、集成、聯調的連貫性。這個過程是一個按照VV&A的原則反復迭代的過程,并且非常注重應用基于模型的設計理念。然而,當前大部分企業的產品開發仍處于設計仿真和集成測試脫節的狀態。研發工程師有能力建立模型,但是不具備測試的手段,仿真僅僅局限于數學層面;測試工程師擁有測試設備,但是所開展的基本上都是全物理測試,不具備在產品生產出來之前開展硬件在環測試的仿真模型。這非常不利于現在V 模式產品開發流程所要求的設計、測試一點的原則。
4)實時性和復雜度:水下航行器系統的仿真涉及大量的計算和復雜的數值算法。如何保證這些精確但復雜的各類模型在規定的毫秒甚至微秒級的步長內實時解算完畢,并與外部硬件進行高效的通訊,對實時仿真測試平臺的性能提出了一個嚴峻的挑戰。
此外,參與復雜系統實時仿真的各個模型,因為所描述的物理對象不同,往往需要以不同的仿真步長運行,但都必須要求擁有一個精確一致的時間,使不同的模型在相同的時間節點上進行相互作用。因此,實時仿真測試各成員的時鐘同步和方式、模型間的數據通訊和方式,也是必須要解決的關鍵問題。
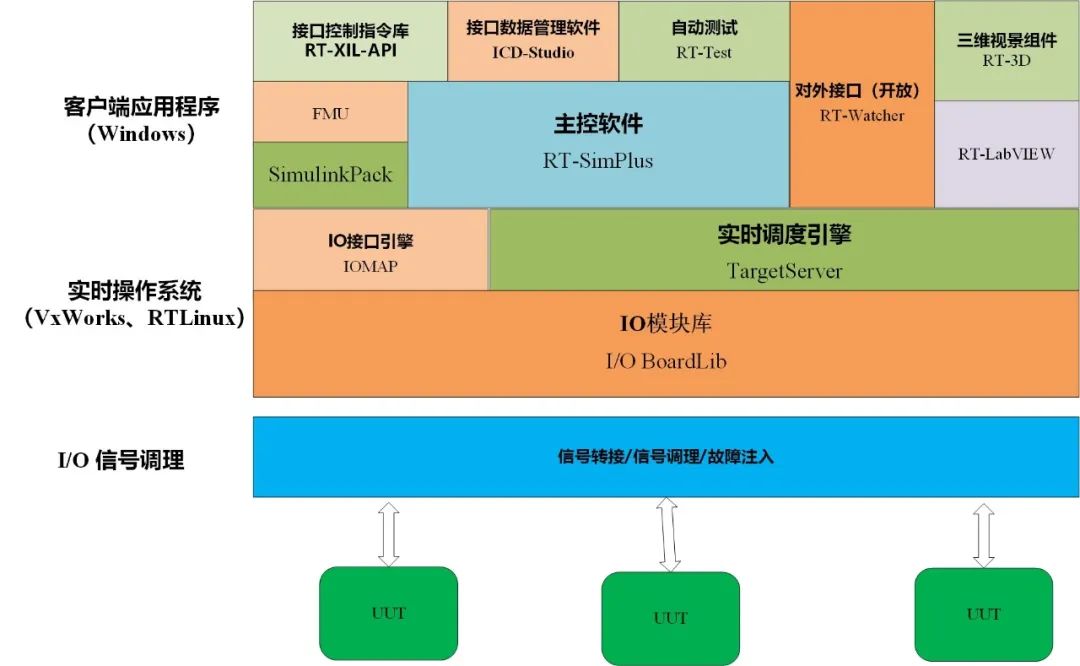
基于MBSE的Links-XIL智能裝備仿真測試一體化數字孿生平臺,是靈思創奇在實時領域積累工作經驗的結晶,是在眾多應用案例的基礎上,為了應對上述挑戰而推出的。該解決方案可以導入各類模型,并使其在硬件時鐘的精確調度下各自按照指定的速率在高性能多 CPU 架構下實時求解、交換數據、并與外部硬件進行高效的通訊,具備
強實時、多用戶、多任務、多學科、多模型、多速率、多I/O、多處理器
的等特點。
該解決方案可以通過其開放的接口與各類測試系統進行集成,其功能覆蓋V 模式現代開發流程中數學仿真、快速原型、硬件在環、系統集成、聯調測試與故障注入的各個階段的任務,以及不同階段的快速迭代轉換,是產品從以往面向功能實現、到當前著重系統性能飛躍的高品質設計、開發和驗證的理想平臺。
注:點擊圖片可了解產品詳情
基于Links-XIL智能裝備仿真測試一體化數字孿生平臺在某型號水下航行器研制項目中成功搭建了半實物仿真驗證實驗室,提供水下航行器半物理仿真模塊庫,該模塊庫根據模塊化、通用化思想,合理劃分功能模塊,完成動力學、環境、傳感器和執行機構模擬器等模塊;將典型水下航行器分布式半物理仿真實驗流程形成較為完善的試驗指導書,能夠達到新入所人員獨立學習掌握,幫助客戶建立一支良好的半物理仿真測試隊伍。
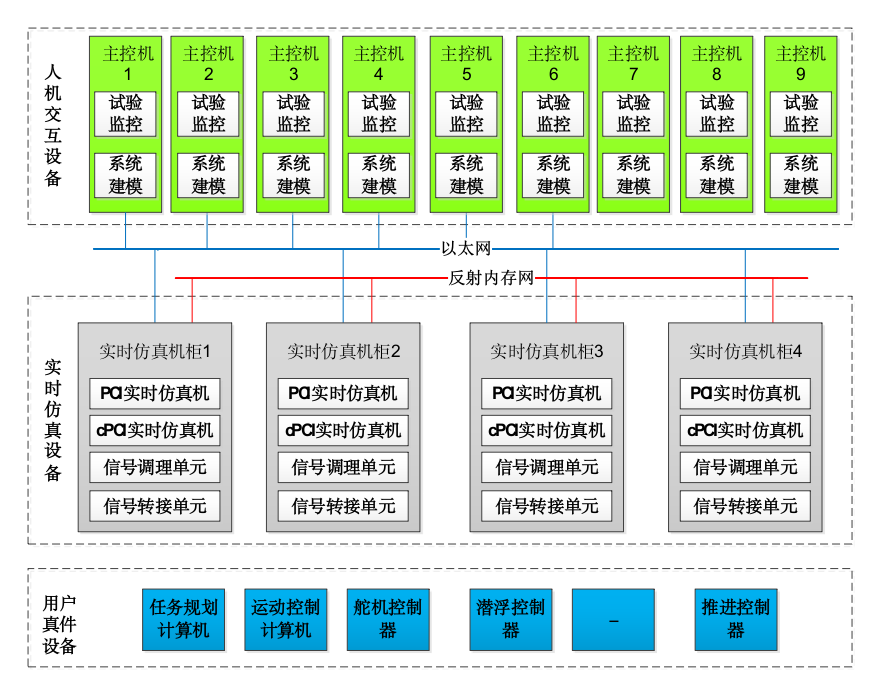
本平臺包括9個主控機節點、兩套實時仿真機柜,并通過以太網和反射內存網實現與已有系統的互聯互通,協同工作。
以均衡系統為例,本項目采用SimScape進行建模。SimScape產品提供了一個自然、高效方法來構造物理系統的數學模型。通過物理連接來創建多域原理圖,具體特性如下:
1)與Simulink?控制算法在同一環境下仿真多域物理系統
2)物理建模模塊,涵蓋 10 個以上物理域,包括機械、電氣、液壓和兩相流
3)基于MATLAB?的Simscape?語言,支持使用文本定義物理建模組件、域和庫
4)符號方程降階以及適用于微分代數方程(DAE)組的求解技術,包括事件處理
5)用于實時仿真和硬件在環(HIL)測試的專業求解方法
6)參數和變量都有物理單位,并自動進行單位轉換
7)(利用 Simulink Coder?)支持生成C代碼
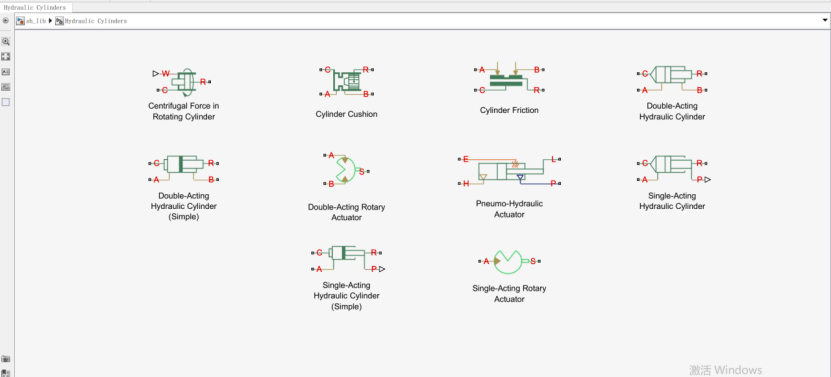
圖1SimScape液壓模型庫
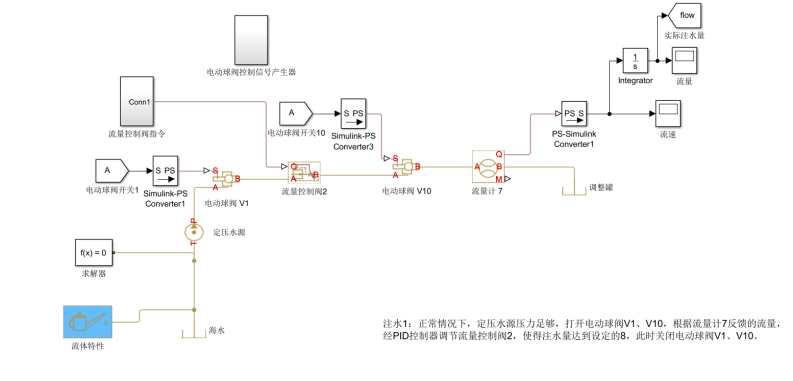
圖2注水模型
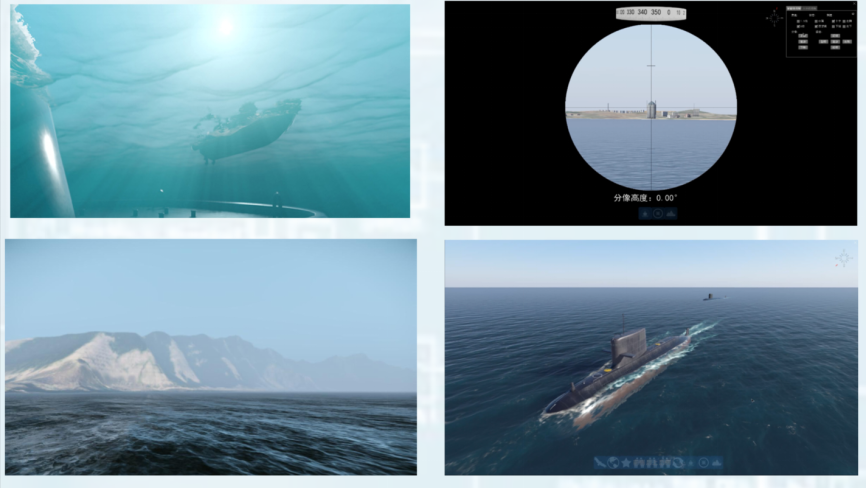
圖3水下航行器運動姿態三維展示
本實驗室可以提供準確、可重復的測試環境,幫助設計團隊驗證系統性能、優化控制策略、評估人機交互性、驗證系統安全性、提前發現問題,同時還可以優化交互與反饋、評估效能、進行系統集成與驗證,以及增強培訓和操作準備。這些方面的優化和改進可以提高水下航行器控制系統的可靠性、效能和安全性。


























