VPLP 設計:利用先進的 CFD 仿真技術革新水翼設計

4 分鐘閱讀

自上兩屆美洲杯帆船賽以來,水翼艇釋放了帆船的速度,并且專門采用 CFD 設計。法國公司 VPLP Design 處于水翼艇概念的前沿,并與 Alex Thomson Racing 和 Charal Sailing Team 合作開發了上一代 IMOCA,設計出可以真正飛越海洋的高效帆船。在他們的所有目標中,VPLP 必須根據所需升力的角度和吃水深度確定水翼的正確位置。這個目標傳統上需要每個速度運行六到八次模擬,直到Fine Marine為 VPLP 提供了一種新的創新方法,將這個工作流程減少到一個單一的模擬,同時考慮更多的物理。
方法
能夠在一次計算中找到水翼的最佳位置意味著目標升力應該成為模擬的輸入。CFD 代碼應自動找到動態平衡位置并同時達到所需的升力。為了實現這一目標,Fine Marine 中開發了一項新功能,現在可作為專用于水翼的準靜態方法使用:流量求解器根據目標升力以給定頻率調整水翼傾角和偏航角。求解器的后續預測逐步且快速地確定動態平衡:通常在大約 1-2 秒的物理時間內達到穩定。
這種方法需要:
Fine Marine 的重疊技術使水翼運動的自由度成為可能
高質量的體積網格,具有準確性和穩健性
一種基于 Fidelity Automesh 的新型網格生成方法
提議的方法是從遵循水翼形狀的初始彎曲塊啟動 NUMECA 的全六邊形非結構化網格生成器Fidelity Automesh(以前稱為 Hexpress)(見圖 2)。這確保了水翼表面和域邊界處的高質量網格。
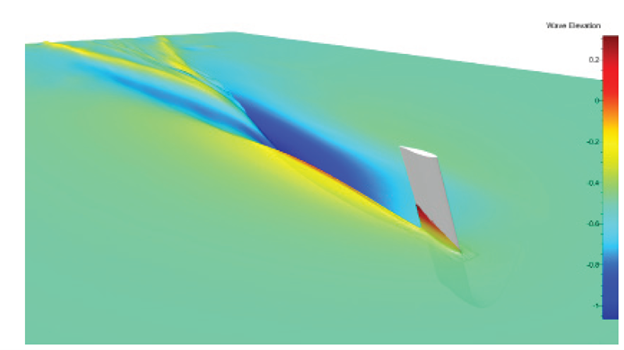
圖 1:水翼艇尾流的 3D 表示
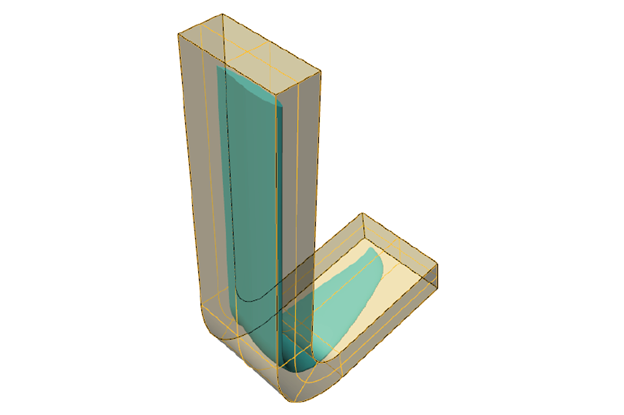
圖 2:箔片周圍的彎曲區域
然后使用 Fidelity Automesh 執行網格細化和粘性層。圖 3 和圖 4 說明了表面上細胞的良好對齊。
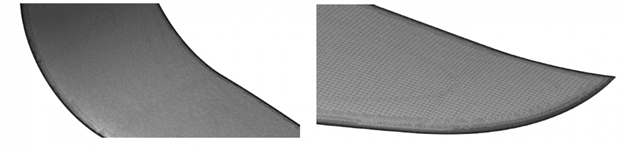
圖 3 和圖 4:肩部(右)和箔前緣(左)上的表面網格
因此,這個水翼網格被放置在笛卡爾背景網格內,允許穿越虛擬海洋。這兩個網格由于 Fine Marine 的重疊功能而連接,在水翼域的邊界處相互通信流量數據。
此外,為了確保理想的插值,自適應網格細化技術僅在絕對必要的地方動態細化單元:在模擬期間的自由表面位置和重疊的網格邊界處。因此,與應該估計細化的等效靜態網格相比,總網格大小減少了 800k 個單元。
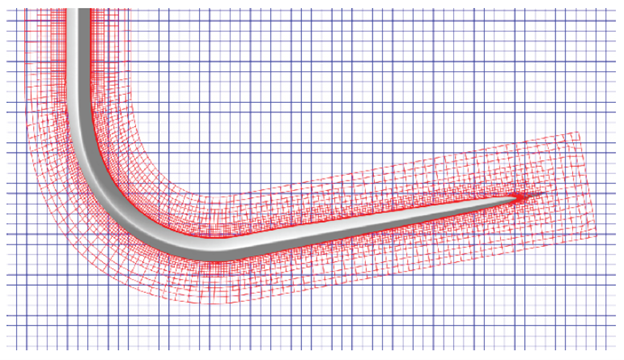
圖 5:網格的前視圖(藍色:背景,紅色:水翼重疊)
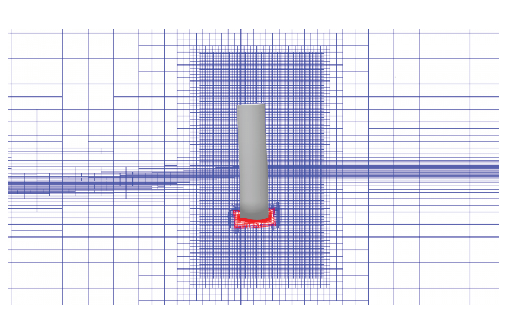
圖 6:動態自由表面細化的側視圖
流固耦合的重要性
由于水翼是帆船在飛行過程中唯一接觸水面的部分,因此它們會承受高壓,并且它們的結構會發生足以影響其性能的變形,即使這種變形會保持相對較小和線性。因此,可以使用模態方法,它只需要預先計算結構的振型。然后可以在 Fine Marine 內部完全解決完整的交互,而無需與 FEA 代碼交互。由于箔的運動相對穩定,因此也可以使用一種新的更快的方法來求解結構變形:一種用于變形的準靜態方法,就像它用于運動一樣。額外的 CPU 成本僅為 20% 左右,但卻能對設計決策帶來重要影響。在這種情況下,例如,彎曲和扭轉剛度影響動態平衡位置,因此影響水翼周圍的流場。偏航角從 2.53 變為 3.40 度(見圖 7),阻力從 8.741 變為 8.935N。
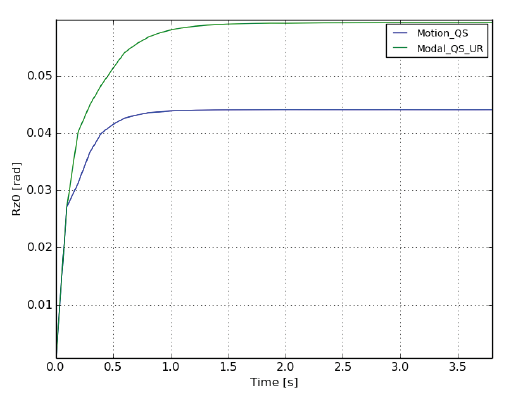 圖 7:比較模態“Modal_QS_UR”和非模態“Motion_QS”模擬的偏航角收斂
圖 7:比較模態“Modal_QS_UR”和非模態“Motion_QS”模擬的偏航角收斂
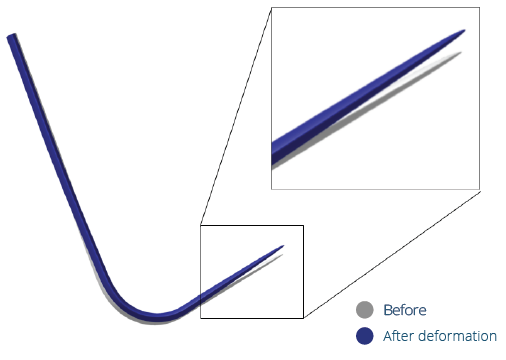
圖 8:使用模態方法進行 Fine Marine 模擬期間的結構變形
結論與展望
VPLP 設法將其設計過程的仿真時間縮短了八分之一,同時評估了比以前更多的物理。借助 Cadence 專用于海洋流體動力學的軟件,他們能夠通過可靠、快速和穩健的過程研究大量的水翼變體。下一步,Cadence 的Fidelity Optimization優化解決方案具有粗略 DoE、不確定性量化和高級代理建模的強大功能,將允許在現實條件下優化下一代水翼。
文章來源:cadence博客





















工程師必備
- 項目客服
- 培訓客服
- 平臺客服
TOP




