目前,全球范圍的智能、自主船舶研究與開發處于快速增長的階段,中國、日本、韓國、美國、荷蘭、挪威、意大利、英國、芬蘭、法國、德國、澳大利亞等國家及技術開發商等展開大量研究,目標攻破關鍵技術,奪取標準制定權,搶占智能船舶、自主化船舶市場。
目前我國內河船舶運輸量穩步增長,但內河航運存在船舶老舊、自動化程度低、船員短缺、素質較低等問題,據統計,70%的船舶事故與駕駛人員在靠離泊過程中的不良船藝有關,這些事故不僅會導致巨大的經濟損失,也會造成嚴重的人員傷亡和環境污染。靠離泊作業過程中,一方面由于低速、淺水、岸壁效應的影響,船舶航行穩定性、操縱響應性變差;另一方面,外界風、流尺度與船舶航行速度處于同一量級,此時船舶水動力表現出強非線性,更易受到外界干擾影響;此外,內河貨船的靠離泊作業需要借助槳、舵、側推器、拖輪等裝置的協助實現船舶的掉頭、轉向、橫移、停船等操作,船舶的操控相對復雜,穩定控制難度大,安全風險高。為解決內河貨船靠泊過程中出現的問題,降低作業風險,亟待開發一種面向內河貨船的新型、安全、高效的靠泊作業技術及方法。
近年來,國際海事組織和各大船級社相繼提出了關于自動靠離泊技術的規范和要求,日本、韓國和歐洲相關企業和機構均在開展靠離泊系統的研究和試驗,并取得了大量的研究成果。
2018年,日本國土交通省(MLIT)通過汐路丸(Shioji Maru)號訓練研究船,演示自主航行以及自動靠離泊技術,并計劃在2025年實現項目的實際應用。2022年,日本商船三井使用沿海集裝箱船Mikage進行靠離泊航行測試,使用無人機代替船員,完全實現整個靠泊、系泊過程的自動化,該項目在提高靠離泊過程的安全性、減少船員勞動力需求和降低成本等問題上有顯著成果。2020年,韓國智能水面船項目(KASS)聯合KRISO、KAIST、韓國海事海洋大學等科技公司及科研院所,計劃開展包含輔助/自動靠泊系統及其原型機在內的智能船舶技術研究,目前已取得相當的研究成果。
 ▲ 圖1 日本汐路丸(Shioji Maru)號訓練研究船自動靠泊 圖源/日本MarEx網
▲ 圖1 日本汐路丸(Shioji Maru)號訓練研究船自動靠泊 圖源/日本MarEx網
 ▲ 圖2 韓國智能水面船項目KASS輔助靠離泊 圖源/韓國KASS網
2018年,芬蘭瓦錫蘭科技服務公司依托其Dock-to-Dock智能靠泊項目成果,完成了“Folgefonn”的渡輪在3個港口間的自主航行與自動靠離泊。2018年12月,羅爾斯羅伊斯公司和芬蘭國有渡輪運營商Finferries在芬蘭圖爾庫市南部群島成功展示了世界上第一艘全自動渡船,采用多源傳感器及人工智能技術實現船舶航行狀態及航行環境感知,利用自動導航系統實現船舶靠離碼頭時的航線、航速控制,無需人工干預即可完成自動靠離泊。
2021年,挪威Kongsberg與Yara公司合作打造的“YARA Birkeland”號集裝箱船在挪威南部進行了12海里的短途自主航行,在Macgregor智能系泊系統協助下,初步實現無人船的靠離泊技術應用。2021年瑞典Volvo Penta公司展示了其靠離泊輔助系統中的動態變量補償技術及航向保持功能,該靠離泊輔助系統的應用時業界首個全集成輔助靠離泊系統的商業應用。
▲ 圖2 韓國智能水面船項目KASS輔助靠離泊 圖源/韓國KASS網
2018年,芬蘭瓦錫蘭科技服務公司依托其Dock-to-Dock智能靠泊項目成果,完成了“Folgefonn”的渡輪在3個港口間的自主航行與自動靠離泊。2018年12月,羅爾斯羅伊斯公司和芬蘭國有渡輪運營商Finferries在芬蘭圖爾庫市南部群島成功展示了世界上第一艘全自動渡船,采用多源傳感器及人工智能技術實現船舶航行狀態及航行環境感知,利用自動導航系統實現船舶靠離碼頭時的航線、航速控制,無需人工干預即可完成自動靠離泊。
2021年,挪威Kongsberg與Yara公司合作打造的“YARA Birkeland”號集裝箱船在挪威南部進行了12海里的短途自主航行,在Macgregor智能系泊系統協助下,初步實現無人船的靠離泊技術應用。2021年瑞典Volvo Penta公司展示了其靠離泊輔助系統中的動態變量補償技術及航向保持功能,該靠離泊輔助系統的應用時業界首個全集成輔助靠離泊系統的商業應用。
 ▲ 圖3 芬蘭瓦錫蘭Dock-to-Dock智能靠泊項目 圖源/瓦錫蘭集團
▲ 圖3 芬蘭瓦錫蘭Dock-to-Dock智能靠泊項目 圖源/瓦錫蘭集團
 ▲ 圖4 瑞典Volvo Penta輔助靠離泊系統 圖源/VOLVO PENTA官網
2019年我國無人駕駛自主航行系統試驗船“智騰”號正式下水,該船舶具備自主航行控制、自主靠離泊等功能。2021年,由交通運輸部水運科學研究院作為技術牽頭單位負責的300TEU集裝箱商船“智飛”號在青島開展海上測試,該船是我國首艘具有智能航行能力、面向商業運營的運輸貨船,也是目前在建的全球噸位最大的智能航行船舶。2021年,舟山引航站、浙江移動舟山分公司與中化興中石油轉運(舟山)有限公司共同打造了“基于5G+MEC大型船舶智慧引航項目”,以大型船舶智慧靠離泊為切入點,搭建統一海上服務平臺提供船舶靠離泊、航行、錨泊、監控輔助等功能。
▲ 圖4 瑞典Volvo Penta輔助靠離泊系統 圖源/VOLVO PENTA官網
2019年我國無人駕駛自主航行系統試驗船“智騰”號正式下水,該船舶具備自主航行控制、自主靠離泊等功能。2021年,由交通運輸部水運科學研究院作為技術牽頭單位負責的300TEU集裝箱商船“智飛”號在青島開展海上測試,該船是我國首艘具有智能航行能力、面向商業運營的運輸貨船,也是目前在建的全球噸位最大的智能航行船舶。2021年,舟山引航站、浙江移動舟山分公司與中化興中石油轉運(舟山)有限公司共同打造了“基于5G+MEC大型船舶智慧引航項目”,以大型船舶智慧靠離泊為切入點,搭建統一海上服務平臺提供船舶靠離泊、航行、錨泊、監控輔助等功能。
 ▲ 圖5 中國“智騰”號試驗船 圖源/廣東造船
▲ 圖5 中國“智騰”號試驗船 圖源/廣東造船
 ▲圖6中國“智飛”號300TEU智能集裝箱船 圖源/人民網
▲圖6中國“智飛”號300TEU智能集裝箱船 圖源/人民網
 ▲ 圖7 中國舟山引航站、浙江移動舟山分公司與中化興中石油轉運(舟山)有限公司“基于5G+MEC大型船舶智慧引航項目” 圖源/舟山港航口岸
綜上,國外關于船舶自動靠離泊的研究起步較早,在輔助/自動靠離泊技術及系統方面做了大量理論研究,并實現了部分實船測試與應用,一定程度上推動了自動靠離泊技術的發展,具有一定的商業價值。相比之下,國內在靠離泊技術方面的研究大部分高等院校和企業處于理論研究階段,以小型渡輪、拖輪、試驗船、訓練船等為載體開展了應用探索與功能測試,還未經實船驗證。
綜合船舶驅動能力、人-船-岸安全因素以及經濟因素,當前法規及碼頭規范中允許船長在120米以下的中小型非危險品船如集裝箱船、滾裝船、散貨船、客等無需申請領航,依靠本船能力完成自引自靠及系泊作業。據統計,中小型船舶的整個靠泊、系泊過程需要的時間平均為45分鐘,在泊位環境、氣象水文條件較差時,整個過程持續的時間將會更長。此外,在靠泊時,由于主機不停止工作,螺旋槳不斷旋轉,長此以往,很可能導致河床土壤松動,增加泊位基底損壞的風險,一方面帶來極高的安全隱患,另一方面,在對泊位進行維護時,由于碼頭或泊位不能用于船舶停靠,也將為碼頭公司帶來巨大的經濟損失。
安全保障方面,傳統的纜繩系泊方式下,運送系纜繩以及穩固系纜繩的工作人員處于船只與碼頭/岸基設備之間,這存在很大的安全隱患。此外,對于系泊的小型船只,當周圍系泊的大型船只突然啟動主機時,這些小船可能會發生碰撞/擠壓事故,與此同時,系纜小船的纜繩可能會突然繃斷,強大的反作用力可能會對在場的工作人員造成嚴重的傷害;花費分配方面,船舶自主靠/系泊時產生的費用主要分配在岸端系纜工作人員聘用,運送系纜繩小型船舶租賃,主機常開狀態下燃料消耗等方面。
隨著科學技術的發展,新型的船舶驅動方式的出現有效地提高了船舶的操縱性及穩定性,自動化、無人駕駛、無人化控制技術的發展促成了無人船、智能船、無纜系泊裝置、智能碼頭的出現,有效保證了船舶靠系泊過程的安全性及經濟型,物聯網技術有效保證了信息傳遞的及時性及準確性。但這些技術當前均以單一個體為對象,而船舶的靠系泊過程一個復雜的多對象參與的過程,是靠系船舶、航經船舶、碼頭之間不斷交互的過程,建立一個智能船自主靠系泊船岸協同一體化系統既是技術發展的趨勢,也是以綠色、安全、快速、經濟為目標的新一代水路交通系統的必要發展需求。
模塊化系統具有技術架構清晰、維護成本低、功能界限明確等優點,對于作業流程復雜、參與對象多、控制精度高、安全要求嚴格的船舶靠離泊作業,構建模塊化的船舶自動靠泊系統,是值得發展與推廣的。
總地來說,船舶自動靠泊系統可以分為三個模塊:船端感知及控制模塊,岸基設備感知及控制模塊,以及數據交互模塊。其中,船端感知及控制模塊主要負責環境、本船及他船航行狀態感知,船舶靠泊作業決策與航跡、航向、航速規劃,船舶低頻運動控制等功能;岸基設備感知及控制模塊則主要針對岸基無纜系泊設備實現對設備自身、系泊船舶狀態以及設備壓力等的感知、設備運動及吸附力控制等功能;數據交互模塊主要以數據庫的形式,在兩個控制模塊之間進行數據存儲及交換,從而實現信息的同步,提高感知精度及控制精度,降低船舶運動及設備控制風險,系統示意圖如圖所示:
▲ 圖7 中國舟山引航站、浙江移動舟山分公司與中化興中石油轉運(舟山)有限公司“基于5G+MEC大型船舶智慧引航項目” 圖源/舟山港航口岸
綜上,國外關于船舶自動靠離泊的研究起步較早,在輔助/自動靠離泊技術及系統方面做了大量理論研究,并實現了部分實船測試與應用,一定程度上推動了自動靠離泊技術的發展,具有一定的商業價值。相比之下,國內在靠離泊技術方面的研究大部分高等院校和企業處于理論研究階段,以小型渡輪、拖輪、試驗船、訓練船等為載體開展了應用探索與功能測試,還未經實船驗證。
綜合船舶驅動能力、人-船-岸安全因素以及經濟因素,當前法規及碼頭規范中允許船長在120米以下的中小型非危險品船如集裝箱船、滾裝船、散貨船、客等無需申請領航,依靠本船能力完成自引自靠及系泊作業。據統計,中小型船舶的整個靠泊、系泊過程需要的時間平均為45分鐘,在泊位環境、氣象水文條件較差時,整個過程持續的時間將會更長。此外,在靠泊時,由于主機不停止工作,螺旋槳不斷旋轉,長此以往,很可能導致河床土壤松動,增加泊位基底損壞的風險,一方面帶來極高的安全隱患,另一方面,在對泊位進行維護時,由于碼頭或泊位不能用于船舶停靠,也將為碼頭公司帶來巨大的經濟損失。
安全保障方面,傳統的纜繩系泊方式下,運送系纜繩以及穩固系纜繩的工作人員處于船只與碼頭/岸基設備之間,這存在很大的安全隱患。此外,對于系泊的小型船只,當周圍系泊的大型船只突然啟動主機時,這些小船可能會發生碰撞/擠壓事故,與此同時,系纜小船的纜繩可能會突然繃斷,強大的反作用力可能會對在場的工作人員造成嚴重的傷害;花費分配方面,船舶自主靠/系泊時產生的費用主要分配在岸端系纜工作人員聘用,運送系纜繩小型船舶租賃,主機常開狀態下燃料消耗等方面。
隨著科學技術的發展,新型的船舶驅動方式的出現有效地提高了船舶的操縱性及穩定性,自動化、無人駕駛、無人化控制技術的發展促成了無人船、智能船、無纜系泊裝置、智能碼頭的出現,有效保證了船舶靠系泊過程的安全性及經濟型,物聯網技術有效保證了信息傳遞的及時性及準確性。但這些技術當前均以單一個體為對象,而船舶的靠系泊過程一個復雜的多對象參與的過程,是靠系船舶、航經船舶、碼頭之間不斷交互的過程,建立一個智能船自主靠系泊船岸協同一體化系統既是技術發展的趨勢,也是以綠色、安全、快速、經濟為目標的新一代水路交通系統的必要發展需求。
模塊化系統具有技術架構清晰、維護成本低、功能界限明確等優點,對于作業流程復雜、參與對象多、控制精度高、安全要求嚴格的船舶靠離泊作業,構建模塊化的船舶自動靠泊系統,是值得發展與推廣的。
總地來說,船舶自動靠泊系統可以分為三個模塊:船端感知及控制模塊,岸基設備感知及控制模塊,以及數據交互模塊。其中,船端感知及控制模塊主要負責環境、本船及他船航行狀態感知,船舶靠泊作業決策與航跡、航向、航速規劃,船舶低頻運動控制等功能;岸基設備感知及控制模塊則主要針對岸基無纜系泊設備實現對設備自身、系泊船舶狀態以及設備壓力等的感知、設備運動及吸附力控制等功能;數據交互模塊主要以數據庫的形式,在兩個控制模塊之間進行數據存儲及交換,從而實現信息的同步,提高感知精度及控制精度,降低船舶運動及設備控制風險,系統示意圖如圖所示:
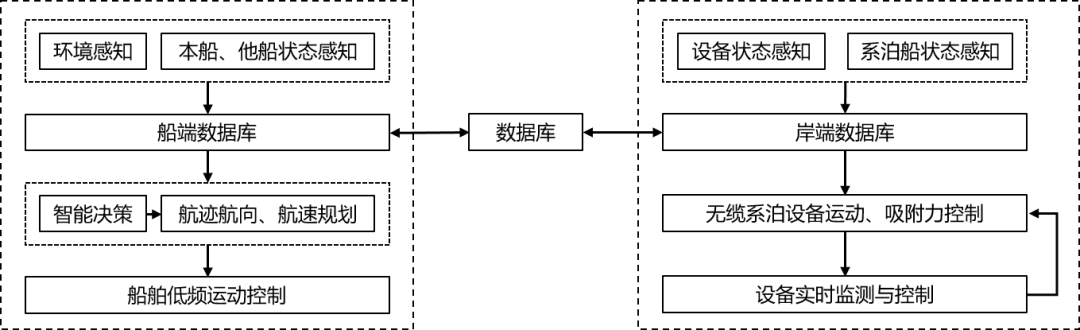 圖8 船舶自動靠泊系統
靠離泊運動是船舶運輸營運最后一公里的關鍵問題,建立模塊化、系統化的船舶自動靠泊系統,能夠減少船舶靠離泊過程中人員勞動強度、提高作業效率和安全性,具有迫切的現實需求和重要的理論意義,其關鍵技術主要包含船舶低速運動建模技術、船舶低頻運動控制技術、船-岸協同感知技術、智能無纜系泊技術等。
船舶的靠離泊運動,例如緊急制動、橫向移動、短時間進車、掉頭等為典型的低速域運動]。低速域下,船舶前進速度接近于零,船舶橫向速度和轉艏角速度與前進速度處于同一量級,且涵蓋0—180°的漂角范圍,船舶水動力非線性強;富余水深小,淺水及岸壁效應明顯,風、流等外部干擾不可忽略;船速低、槳轉速小、沒有舵效,需要借助側推器、拖輪、錨纜等操縱設備控制船舶的橫移與轉向。當前對船舶運動模型的研究主要圍繞常速域下船舶的操縱運動,對于低速域下船舶的操縱性研究較少;此外,船舶操縱性的研究主要采用經驗公式法、試驗法以及計算流體力學方法,基于回歸分析的經驗公式法依賴數據廣度,試驗法研究周期長、推廣性差,目前常采用計算流體力學方法對船舶水動力、流場發展進行研究。構建船舶靠離泊作業條件下的操縱運動模型,是船舶運動控制的理論支撐,是實現船舶自動靠離泊作業的理論基礎。
船舶的靠離泊運動控制不是一個獨立的控制任務,而是同時包含了作業決策、目標規劃以及低頻運動控制。根據靠泊船舶自身船型、載重、推進性能,以及泊位水流、氣象等情況,船舶的安全靠離泊作業往往采用頂流入泊(直接入泊、掉頭入泊)和平行入泊的方式完成靠泊;目標規劃則是以入泊方式為基礎的,根據作業需要,目標規劃往往包含軌跡規劃、航向規劃、航速規劃等。船舶的靠離泊作業對船舶位置、艏向角、速度控制精度要求高,傳統控制方法難以保證船舶在期望位置和姿態同時鎮定,此外,傳統船舶由于硬件限制,無法實現推進系統及轉舵系統的高頻無級控制。為此,國內外學者結合船舶路徑規劃算法,不依賴準確的船舶運動模型設計船舶的自動靠泊控制系統,例如模型預測控制、人工神經網絡、模糊邏輯控制、數據驅動控制、滑模控制、A*路徑追蹤、自抗擾控制等自適應控制算法,這些方法往往依賴算法本身的魯棒性,而忽略了船舶運動模型的準確性,缺乏船舶水動力機理支撐。開展基于船舶運動模型的船舶低速運動控制研究,是實現船舶自動靠離泊的技術基礎。
船舶的靠泊控制主要步驟為:(1)改變航向,(2)逐級降速,(3)主機停轉,依靠余速入泊。根據自動靠泊控制思路及控制手段,自動靠泊流程可以描述為:①船舶由港區移動至泊位附近的A點,②船舶以低速由臨近泊位處的A點移動至泊位處的目標點B點,并同時考慮避讓靜態和動態障礙物。對于船舶自動靠泊系統,靠泊船舶與岸端設備之間的協同感知與交互更是安全系泊的基礎。可見,協同感知技術是船舶靠離泊控制的主要輔助手段,船舶的自動靠泊控制是以協同感知技術為保障的。當前船-岸靠系泊感知設備及算法存在傳感器視角受限、先驗信息缺失、多源信息冗余、數據匹配與信息同步復雜等問題。針對船舶靠泊、系泊場景,基于船-岸視覺、激光雷達、超聲波雷達等傳感器和多網融合技術,進行多源信息融合與補償以及信息交互,重構符合人-機工程的船舶靠系泊作業環境信息與船舶運動及姿態信息,是當前實現船-岸協同感知的主要手段與發展方向。突破面向船舶靠系泊的船岸協同感知技術,是實現船舶自動靠離泊的安全保障。
傳統的船舶系泊方式依靠帶纜工人或帶纜艇將鋼絲等高強度纜繩與系纜樁聯結,進而將船舶固定于泊位。這種方法作業強度大、風險高、效率低,作業難度大,存在脫纜、斷纜等安全隱患。隨著船舶大型化、專業化的發展,傳統系泊方法面臨的挑戰日益增大,無纜系泊方法得到有效發展。當前,無纜系泊主要分為磁吸式系泊及真空式系泊,其中,磁吸式系泊裝置結構簡單、空間占用率低、工作效率高等優點,但由于有害磁場對船載設備的影響,目前其發展受到一定限制。真空式系泊方式利用真空和液壓技術實現無纜系泊,該方法綠色、高效、適應性強、耐用度高,目前應用程度較高。研發基于船舶感知、壓力感知及動態監測的智能無纜系泊技術,是安全實現船舶自動靠泊的最后一環。
圖8 船舶自動靠泊系統
靠離泊運動是船舶運輸營運最后一公里的關鍵問題,建立模塊化、系統化的船舶自動靠泊系統,能夠減少船舶靠離泊過程中人員勞動強度、提高作業效率和安全性,具有迫切的現實需求和重要的理論意義,其關鍵技術主要包含船舶低速運動建模技術、船舶低頻運動控制技術、船-岸協同感知技術、智能無纜系泊技術等。
船舶的靠離泊運動,例如緊急制動、橫向移動、短時間進車、掉頭等為典型的低速域運動]。低速域下,船舶前進速度接近于零,船舶橫向速度和轉艏角速度與前進速度處于同一量級,且涵蓋0—180°的漂角范圍,船舶水動力非線性強;富余水深小,淺水及岸壁效應明顯,風、流等外部干擾不可忽略;船速低、槳轉速小、沒有舵效,需要借助側推器、拖輪、錨纜等操縱設備控制船舶的橫移與轉向。當前對船舶運動模型的研究主要圍繞常速域下船舶的操縱運動,對于低速域下船舶的操縱性研究較少;此外,船舶操縱性的研究主要采用經驗公式法、試驗法以及計算流體力學方法,基于回歸分析的經驗公式法依賴數據廣度,試驗法研究周期長、推廣性差,目前常采用計算流體力學方法對船舶水動力、流場發展進行研究。構建船舶靠離泊作業條件下的操縱運動模型,是船舶運動控制的理論支撐,是實現船舶自動靠離泊作業的理論基礎。
船舶的靠離泊運動控制不是一個獨立的控制任務,而是同時包含了作業決策、目標規劃以及低頻運動控制。根據靠泊船舶自身船型、載重、推進性能,以及泊位水流、氣象等情況,船舶的安全靠離泊作業往往采用頂流入泊(直接入泊、掉頭入泊)和平行入泊的方式完成靠泊;目標規劃則是以入泊方式為基礎的,根據作業需要,目標規劃往往包含軌跡規劃、航向規劃、航速規劃等。船舶的靠離泊作業對船舶位置、艏向角、速度控制精度要求高,傳統控制方法難以保證船舶在期望位置和姿態同時鎮定,此外,傳統船舶由于硬件限制,無法實現推進系統及轉舵系統的高頻無級控制。為此,國內外學者結合船舶路徑規劃算法,不依賴準確的船舶運動模型設計船舶的自動靠泊控制系統,例如模型預測控制、人工神經網絡、模糊邏輯控制、數據驅動控制、滑模控制、A*路徑追蹤、自抗擾控制等自適應控制算法,這些方法往往依賴算法本身的魯棒性,而忽略了船舶運動模型的準確性,缺乏船舶水動力機理支撐。開展基于船舶運動模型的船舶低速運動控制研究,是實現船舶自動靠離泊的技術基礎。
船舶的靠泊控制主要步驟為:(1)改變航向,(2)逐級降速,(3)主機停轉,依靠余速入泊。根據自動靠泊控制思路及控制手段,自動靠泊流程可以描述為:①船舶由港區移動至泊位附近的A點,②船舶以低速由臨近泊位處的A點移動至泊位處的目標點B點,并同時考慮避讓靜態和動態障礙物。對于船舶自動靠泊系統,靠泊船舶與岸端設備之間的協同感知與交互更是安全系泊的基礎。可見,協同感知技術是船舶靠離泊控制的主要輔助手段,船舶的自動靠泊控制是以協同感知技術為保障的。當前船-岸靠系泊感知設備及算法存在傳感器視角受限、先驗信息缺失、多源信息冗余、數據匹配與信息同步復雜等問題。針對船舶靠泊、系泊場景,基于船-岸視覺、激光雷達、超聲波雷達等傳感器和多網融合技術,進行多源信息融合與補償以及信息交互,重構符合人-機工程的船舶靠系泊作業環境信息與船舶運動及姿態信息,是當前實現船-岸協同感知的主要手段與發展方向。突破面向船舶靠系泊的船岸協同感知技術,是實現船舶自動靠離泊的安全保障。
傳統的船舶系泊方式依靠帶纜工人或帶纜艇將鋼絲等高強度纜繩與系纜樁聯結,進而將船舶固定于泊位。這種方法作業強度大、風險高、效率低,作業難度大,存在脫纜、斷纜等安全隱患。隨著船舶大型化、專業化的發展,傳統系泊方法面臨的挑戰日益增大,無纜系泊方法得到有效發展。當前,無纜系泊主要分為磁吸式系泊及真空式系泊,其中,磁吸式系泊裝置結構簡單、空間占用率低、工作效率高等優點,但由于有害磁場對船載設備的影響,目前其發展受到一定限制。真空式系泊方式利用真空和液壓技術實現無纜系泊,該方法綠色、高效、適應性強、耐用度高,目前應用程度較高。研發基于船舶感知、壓力感知及動態監測的智能無纜系泊技術,是安全實現船舶自動靠泊的最后一環。
在新一輪產業變革及嚴峻的國際局勢挑戰下,為響應國家建設交通強國、海洋強國、制造強國的重要戰略部署,緊隨當前智能船舶發展技術潮流,順應內河港口發展需求,作為船舶整個運輸營運過程始終階段的船舶靠離泊作業,是當下智能船舶領域的研究重點與攻克方向。為避免由于港口及泊位環境差、船岸基礎設施弱、船舶自動化程度低、操縱性差等客觀因素,以及人員素質低、經驗不足等主觀因素導致的內河船舶靠泊作業風險高、效率低、環境污染嚴重等問題,開展面向內河船舶自動靠泊的低速運動建模技術、低頻運動控制技術、船岸協同感知技術、智能無纜系泊技術等內河船舶自動靠離泊技術研究刻不容緩。加強制造業、航運業、船級社、高校與科研院所的融合,形成產、學、研、用、檢等各機構的互動、互通、互聯,在全鏈路深耕細作,突破行業壁壘,助力我國在智能航運業、智能制造業等領域奪取船舶智能設備、智能控制標準制定權,搶占智能船舶、自主化船舶市場。
作者:張松 劉佳侖 李詩杰 葉珺
文章來自:中國船檢


























